一种基于骨骼肌模型的许可伸长量测试方法
1.本发明涉及生物力学领域,具体涉及一种基于骨骼肌模型的许可伸长量测试方法。
背景技术:
2.随着机器人和计算机技术的发展,机器人辅助骨折复位手术成为可能。机器人骨折复位过程中,有可能由于过度牵拉损伤肌肉等软组织,有必要了解清楚肌肉所能允许的不损伤的最大拉伸长度,即肌肉许可伸长量,研究肌肉组织的力学模型及被动拉伸性能,对于设计医疗器械、规划骨折复位路径、指导外科手术有重要的意义。
3.关于骨骼肌的粘弹性模型,国内外大多采用hill三元素模型或四元素模型,这些模型考虑了力-阻尼元素、离心收缩时的力-速度关系对肌肉力的影响,但未考虑骨骼肌的羽状角对肌肉力特性的影响,而下肢骨骼肌通常有0~30
°
羽状角,其对肌肉的力学特性的影响不能忽略。
4.关于肌肉组织拉伸性能,国内外大多用动物的肌肉组织,采用准静态拉伸或动态拉伸方法,测试肌肉拉伸时的力学性能。肌肉的准静态拉伸,即加载静态负载的拉伸,是利用生物材料试验机进行肌肉的准静态拉伸测试,分析拉伸时肌肉的断裂性能,该方法仅能得到肌肉在加载静态负载下的力学性能,无法用于了解肌肉在冲击加载条件下的动态力学性能。肌肉的动态拉伸,是利用霍普金森拉杆试验,进行肌肉的动态拉伸测试,获得肌肉动态拉伸过程中的应力-应变变化情况,结果表明,肌肉受到外力牵拉时,首先发生弹性形变,随后进入塑形区,继续牵拉引起结构损伤,该方法可以获得肌肉受损时的应力和应变,而无法获得肌肉拉伸损伤时的肌肉长度。关于肌肉轴向拉伸过程中,肌肉所能允许的不损伤的最大拉伸长度,目前尚无合适的测试方法。
技术实现要素:
5.为了解决上述技术问题,本发明的目的是提供一种基于骨骼肌模型的许可伸长量测试方法,用于机器人骨折复位中可能对软组织过度牵拉的预警。
6.为达到上述目的,本发明采用如下技术方案:
7.一种基于骨骼肌模型的许可伸长量测试方法,具体包括两个步骤:
8.1)建立骨骼肌的粘弹性模型,设定肌肉初始长度、肌肉长度增量,计算肌肉力随肌肉长度的变化情况,获得肌肉的理论力-位移曲线;
9.2)利用肌肉拉伸的精密位移台实验系统,进行肌肉轴向低速拉伸,测试肌肉拉伸过程中所受到的力、肌肉伸长量,实时显示被测肌肉的实验力-位移曲线,通过与肌肉的理论力-位移曲线对比,确定被测试肌肉的许可伸长量。
10.所述骨骼肌的粘弹性模型,考虑了下肢骨骼肌的羽状角对肌肉力特性的影响,包括收缩单元ce、并联弹性单元pee、串联弹性单元see、串联阻尼单元sde以及羽状角α;所述收缩单元ce由肌球蛋白微丝与肌动蛋白微丝组成,主动产生肌力;所述并联弹性单元pee由
肌束膜及肌纤维膜组成,其中的结缔组织具有弹性,当肌肉受拉时产生被动弹力;所述串联弹性单元see代表肌腱、肌节间z盘及肌微丝组织,具有被动弹性;所述串联阻尼单元sde能抑制高频振荡,所述羽状角α描述肌纤维的排列方向与肌肉力作用线之间的夹角。
11.所述肌肉的理论力-位移曲线,是根据骨骼肌的粘弹性模型,建立力平衡方程;设定肌肉的初始长度、肌肉长度增量及激活程度参数,计算肌肉在不同长度下的肌肉力,获得肌肉的理论力-位移曲线,将其作为确定肌肉许可伸长量的依据;包括以下两个步骤:
12.1-1)根据骨骼肌的粘弹性模型,建立力平衡方程,确定肌肉在拉伸过程中的肌肉力:
[0013][0014]
式中,f
mtm
为肌肉力,f
ce
为收缩单元产生的力,f
pee
为弹性单元产生的力,f
see
为串联弹性单元产生的力,f
sde
为串联阻尼单元产生的力,α(l
ce
)为肌纤维与肌腱的夹角;
[0015]
1-2)根据骨骼肌解剖结构,确定肌肉的起止点坐标,设定肌肉初始长度l0,按照等长递增,由上式计算骨骼肌不同长度l下的肌肉力f
mtm
,获得肌肉的肌肉力-长度曲线;将肌肉长度转换为肌肉伸长量,获得肌肉的理论力-位移曲线。
[0016]
所述步骤2)具体包括如下步骤:
[0017]
2-1)准备肌肉拉伸测试的精密位移台实验系统;
[0018]
2-2)将待测试肌肉纤维试样的两端分别固定,调节精密位移台,使肌肉纤维试样处于自然伸直状态;
[0019]
2-3)启动精密位移台,轴向拉伸肌肉纤维,分别由力传感器、精密位移台测试拉伸力和位移,上位机中绘制并实时显示肌肉的实验力-位移曲线;
[0020]
2-4)当实验力-位移曲线开始出现水平时,停止精密位移台;
[0021]
2-5)对比肌肉的实验力-位移曲线与理论力-位移曲线,确定肌肉的许可伸长量。
[0022]
所述精密位移台实验系统,由软组织拉伸组件、力传感及采集组件、显示预警组件组成;所述软组织拉伸组件,包括左端夹具、高精密位移台、右端夹具、运动控制器,用于肌肉的轴向拉伸;所述力传感器及采集组件,包括力传感器、称重变送器、交直流转换器、数据采集卡,用于采集拉伸过程中的肌肉力,获得肌肉的实验力-位移曲线;所述显示预警组件,包括上位机软件系统,用于对比拉伸过程中的实验力-位移曲线与理论力-位移曲线,显示、预警肌肉组织损伤临界点,以保证肌肉始终处于安全拉伸状态。
[0023]
与现有技术相比,本发明具有如下的优点:
[0024]
1.本发明方法提出一种下肢骨骼肌的新型粘弹性模型,由该模型建立骨骼肌的力平衡方程,获得骨骼肌的理论力-位移曲线;准备肌肉拉伸测试的精密位移台实验系统,轴向拉伸肌肉纤维,绘制肌肉的实验力-位移曲线,实时对比实验曲线与理论曲线,获得肌肉许可伸长量;
[0025]
2.本发明所述方法,用于获得肌肉的许可伸长量,据此可以避免过度牵拉而损伤肌肉。
附图说明
[0026]
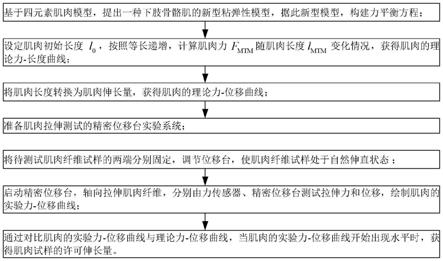
图1为本发明基于骨骼肌模型的许可伸长量测试方法的流程图。
[0027]
图2为本发明的骨骼肌的粘弹性模型。
[0028]
图3为本发明的由肌肉粘弹性模型计算的肌肉力-长度曲线以及理论力-位移曲线,以猪腿肌肉为例。其中,图3(a)为理论的力-长度曲线图,图3(b)为理论的力-位移曲线图。
[0029]
图4为本发明的肌肉许可伸长量测试方法的流程图。
[0030]
图5为本发明的肌肉许可伸长量测试装置图。
[0031]
图6为本发明实验测试所得的实验力-位移曲线。
具体实施方式
[0032]
下面结合附图,对本发明的具体实施例做进一步的说明。
[0033]
实施例一:
[0034]
一种基于骨骼肌模型的许可伸长量测试方法,具体包括两个步骤:
[0035]
1)建立骨骼肌的粘弹性模型,设定肌肉初始长度、肌肉长度增量,计算肌肉力随肌肉长度的变化情况,获得肌肉的理论力-位移曲线;
[0036]
2)利用肌肉拉伸的精密位移台实验系统,进行肌肉轴向低速拉伸,测试肌肉拉伸过程中所受到的力、肌肉伸长量,实时显示被测肌肉的实验力-位移曲线,通过与肌肉的理论力-位移曲线对比,确定被测试肌肉的许可伸长量。
[0037]
发实施例方法提出一种下肢骨骼肌的新型粘弹性模型,获得骨骼肌的理论力-位移曲线;准备肌肉拉伸测试的精密位移台实验系统,轴向拉伸肌肉纤维,绘制肌肉的实验力-位移曲线,实时对比实验曲线与理论曲线,获得肌肉许可伸长量。
[0038]
实施例二:
[0039]
本实施例与实施例一基本相同,特别之处在于:
[0040]
一种基于骨骼肌模型的许可伸长量测试方法,如图1所示,以猪的股二头短肌为例,具体包括两个步骤:
[0041]
1)建立骨骼肌的粘弹性模型,设定肌肉初始长度、肌肉长度增量,计算肌肉力随肌肉长度的变化情况,获得肌肉的理论力-位移曲线。
[0042]
所述骨骼肌的粘弹性模型,如图2所示,考虑了下肢骨骼肌的羽状角对肌肉力特性的影响,包括收缩单元ce、并联弹性单元pee、串联弹性单元see、串联阻尼单元sde以及羽状角α;所述收缩单元ce由肌球蛋白微丝与肌动蛋白微丝组成,主动产生肌力;所述并联弹性单元pee由肌束膜及肌纤维膜组成,其中的结缔组织具有弹性,当肌肉受拉时产生被动弹力;所述串联弹性单元see代表肌腱、肌节间z盘及肌微丝组织,具有被动弹性;所述串联阻尼单元sde能抑制高频振荡,所述羽状角α描述肌纤维的排列方向与肌肉力作用线之间的夹角。
[0043]
所述肌肉的理论力-位移曲线,是根据骨骼肌的粘弹性模型,建立力平衡方程;设定肌肉的初始长度、肌肉长度增量及激活程度参数,计算肌肉在不同长度下的肌肉力,获得肌肉的理论力-位移曲线,将其作为确定肌肉许可伸长量的依据;包括以下两个步骤:
[0044]
1-1)根据骨骼肌的粘弹性模型,建立力平衡方程,确定肌肉在拉伸过程中的肌肉力:
[0045][0046]
式中,f
mtm
为肌肉力,f
ce
为收缩单元产生的力,f
pee
为弹性单元产生的力,f
see
为串联弹性单元产生的力,f
sde
为串联阻尼单元产生的力,α(l
ce
)为肌纤维与肌腱的夹角;
[0047]
1-2)根据猪腿肌肉起止点坐标,确定肌肉初始长度为3.4cm,以间距为0.01cm递增,由力平衡方程分别计算不同肌肉长度下的肌肉力f
mtm
。根据计算的肌肉力及肌肉长度,获得肌肉的肌肉力-长度曲线,如图3(a)所示;将肌肉长度转换为肌肉伸长量,获得肌肉的理论力-位移曲线,如图3(b)所示。
[0048]
2)利用肌肉拉伸的精密位移台实验系统,进行肌肉轴向低速拉伸,测试肌肉拉伸过程中所受到的力、肌肉伸长量,实时显示被测肌肉的实验力-位移曲线,通过与肌肉的理论力-位移曲线对比,确定被测试肌肉的许可伸长量,如图4所示。
[0049]
2-1)准备肌肉拉伸测试的精密位移台实验系统,如图5所示;精密位移台实验系统,由软组织拉伸组件、力传感及采集组件、显示预警组件组成;所述软组织拉伸组件,包括左端夹具2、高精密位移台3、右端夹具5、运动控制器9,用于肌肉的轴向拉伸;所述力传感器及采集组件,包括力传感器1、称重变送器4、交直流转换器6、数据采集卡7,用于采集拉伸过程中的肌肉力,获得肌肉的实验力-位移曲线;所述显示预警组件,包括上位机软件系统8,用于对比拉伸过程中的实验力-位移曲线与理论力-位移曲线,显示、预警肌肉组织损伤临界点,以保证肌肉始终处于安全拉伸状态。
[0050]
本实施例精密位移实验台实验系统,在高精密位移台3上分别安装左端夹具2和右端夹具5,力传感器1的两端分别与固定端的l型连接板、左端夹具2进行刚性连接,称重变送器4与数据采集卡7左端进行连接,数据采集卡7右端与上位机8进行连接,运动控制器9一端与上位机8连接,另一端通过交直流转换器6与高精密位移台3连接。
[0051]
2-2)将待测试肌肉纤维试样的两端分别固定,调节精密位移台,使肌肉纤维试样处于自然伸直状态;
[0052]
2-3)启动精密位移台,轴向拉伸肌肉纤维,分别由力传感器、精密位移台测试拉伸力和位移。由上位机软件系统8通过运动控制器9控制高精密位移台3沿轴向移动的加速度、速度和位移,采用6cm
·
min-1
的速度牵拉肌肉组织,对肌肉试样右端的牵拉改变肌肉的拉伸长度,由力传感器1实时测量肌肉产生的被动张力,经称重变送器4放大,保存测试数据,实时绘制并显示肌肉的实验力-位移曲线,如图6所示。
[0053]
2-4)拉伸过程中,监控实验力-位移曲线与理论力-位移曲线,当实验力-位移曲线开始出现水平线时,停止精密位移台。
[0054]
2-5)根据位移台移动的距离δl,即得肌肉试样的许可伸长量。
[0055]
本发明上述实施例下肢骨骼肌的粘弹性模型,能确定肌肉的理论力-位移曲线;利用肌肉拉伸实验装置,测试肌肉拉伸过程中的力-位移变化,实时显示被测肌肉的实验力-位移曲线,与理论力-位移曲线对比,确定被测试肌肉的许可伸长量,根据肌肉的许可伸长量,可以避免过度牵拉而损伤肌肉。具有测试方法简单、结果可靠等显著优点。
[0056]
上面对本发明实施例结合附图进行了说明,但本发明不限于上述实施例,还可以根据本发明的发明创造的目的做出多种变化,凡依据本发明技术方案的精神实质和原理下做的改变、修饰、替代、组合或简化,均应为等效的置换方式,只要符合本发明的发明目的,
只要不背离本发明的技术原理和发明构思,都属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1