基于空间邻域信息的雷达异常点云检测方法及检测装置与流程
1.本发明主要涉及到无人车技术领域,特指一种基于空间邻域信息的雷达异常点云检测方法及检测装置。
背景技术:
2.在现有技术中,无人驾驶车辆在行驶过程中一般是通过“雷达点云”来识别目标和障碍,即:当检测到前方有障碍时,车辆会停止前行以遵守安全优先原则。
3.但是,在恶劣天气或其他特殊场景(环境)之下,例如在下雨、下雪或扬尘等场景下行驶时,由于目前雷达一般都是采用回波模式进行距离检测的方式,即采用某一种回波模式以确定发射光的结束时间以进行测距计算,那么空中的小颗粒物质(例如雨滴、雪花、扬尘等)就会折射一部分回波到雷达接收单元上,进而给雷达测量带来干扰,影响到测距的精度。而且,进一步此时的点云图中会存在小部分空中异常点,将直接影响到障碍检测单元,触发虚警停车,令车辆在此类场景下出现运行不够通畅的问题,甚至影响到行车安全。
技术实现要素:
4.本发明要解决的技术问题就在于:针对现有技术存在的技术问题,本发明提供一种原理简单、适用范围广、能够提高检测精确度的基于空间邻域信息的雷达异常点云检测方法及检测装置。
5.为解决上述技术问题,本发明采用以下技术方案:
6.一种基于空间邻域信息的雷达异常点云检测方法,其步骤包括:
7.步骤s1:获取道路的三维点云,得到障碍点云,通过点云训练集得到邻域的第一阈值和第二阈值;
8.步骤s2:利用第一阈值和第二阈值对三维点云进行筛选;
9.步骤s3:对筛选出来的三维点云进行空间结构分析;
10.步骤s4:将通过空间结构分析筛选出来的异常点云数据输出。
11.作为本发明检测方法的进一步改进:所述步骤s1包括:
12.步骤s101:基于雷达扫描构建道路三维点云描述;
13.步骤s102:基于扫描三维点云描述,利用地面模型获取障碍点云;
14.步骤s103:通过点云训练集得到邻域的第一阈值和第二阈值;
15.即,使用雷达扫描周围环境,构建基于周围场景的三维点云描述。
16.作为本发明检测方法的进一步改进:所述步骤s101中,在车辆行驶过程中实时获取当前点云,利用地面模型获取道路障碍点云。
17.作为本发明检测方法的进一步改进:所述点云为激光点云或图像点云。
18.作为本发明检测方法的进一步改进:对所述阈值的训练方法为统计法或者机器学习法。
19.作为本发明检测方法的进一步改进:所述步骤s2包括:
20.遍历道路障碍点云;
21.选择第一阈值,对道路的障碍点云建立第一近邻空间邻域关系,取得第一近邻关系的空间数目或区域大小;并分析点云空间结构特征;
22.选择第二阈值,对道路的障碍点云建立第二近邻空间邻域关系,取得第二近邻关系的空间数目或区域大小;并分析点云空间结构特征。
23.作为本发明检测方法的进一步改进:所述步骤s3包括:依据所筛选的第一近邻关系评估结果和第二近邻关系评估结果,统计两者的数目比值及分析点云空间结构特征作为正常点的最终评估结果根据。
24.作为本发明检测方法的进一步改进:所述步骤s4包括:在最终评估结果中,将低于预设阈值的点云判定为空中异常点云,对外输出。
25.作为本发明检测方法的进一步改进:所述邻域空间结构包括点云团物理尺寸描述、点云数目、点云有效邻域作用距离、以及点云密集度分布情况中的一项或多项。
26.作为本发明检测方法的进一步改进:所述异常点云为悬空的孤立点、或点集且为空间结构,所述异常点云的特征包括:点云的反射率低;点云密度小且悬空;点云集的方向朝激光雷达方向;点云集的高度差变化小;点云连续多帧都会存在的概率低。
27.作为本发明检测方法的进一步改进:所述异常点云的筛选流程包括:
28.将所有点云数据栅格化,所述栅格化是指把点云数据聚类到某个格子中,遍历每个栅格并记录包含障碍的栅格坐标;
29.遍历障碍栅格,根据第一阈值搜索附近邻域的栅格的点云,对第一邻域中的点云进行特征分析,满足所述异常点云的特征;然后,再根据第二阈值搜索附近邻域的栅格的点云密度,对第二邻域中的点云进行特征分析,满足所述异常点云的特征;最后根据第一邻域和第二邻域的点云密度的比率以及点云特征进行筛选,满足所述异常点云的特征;所述点云密度的比率为当前栅格的点云总数目和邻域内的点云总数目进行比较。
30.本发明进一步提供一种基于空间邻域信息的雷达异常点云检测装置,其包括:
31.点云获取单元模块,用来获取道路的三维点云,得到障碍点云,通过点云训练集得到邻域的第一阈值和第二阈值;
32.点云邻域筛选单元,用来利用第一阈值和第二阈值对三维点云进行筛选;
33.空间特性分析单元,用来对筛选出来的三维点云进行空间结构分析;
34.异常点云输出单元,用来将通过空间结构分析筛选出来的异常点云数据输出。
35.作为本发明检测装置的进一步改进:所述点云获取单元模块是通过雷达扫描构建道路三维点云描述;所述点云为激光点云或图像点云。
36.作为本发明检测装置的进一步改进:所述点云邻域筛选单元执行以下流程:
37.遍历道路障碍点云;
38.选择第一阈值,对道路的障碍点云建立第一近邻空间邻域关系,取得第一近邻关系的空间数目或区域大小;并分析点云空间结构特征;
39.选择第二阈值,对道路的障碍点云建立第二近邻空间邻域关系,取得第二近邻关系的空间数目或区域大小;并分析点云空间结构特征;
40.选择第二阈值是在基于选择并基于第一阈值进行分析之后的过程。
41.与现有技术相比,本发明的优点就在于:
42.1、本发明的基于空间邻域信息的雷达异常点云检测方法及检测装置,原理简单、适用范围广、能够提高检测精确度,其使用空间邻域及点云空间特征剔除空间异常点云,在非理想环境下(例如雨滴、雪花、扬尘等)保证无人驾驶车辆能够顺畅行驶。
43.2、本发明的基于空间邻域信息的雷达异常点云检测方法及检测装置,利用异常点云空间特性(几何尺寸比如宽度、长度、面积,数学统计特性如密度、质心点)及物理特性(反射率),有效移除异常点云,避免出现虚警障碍。本发明中阈值通过机器学习方式获取,提高了系统的精确度。
附图说明
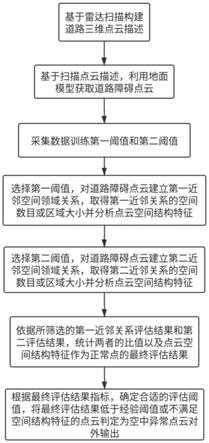
44.图1是本发明检测方法在具体应用实例中的流程示意图。
45.图2是本发明检测装置在具体应用实例中的结构原理示意图。
46.图3是本发明在一个具体应用实例中的雨天原始点云示意图。
47.图4是对图3进行处理之前的障碍图。
48.图5是对图3进行处理之后的障碍图。
具体实施方式
49.以下将结合说明书附图和具体实施例对本发明做进一步详细说明。
50.如图1所示,本发明的基于空间邻域信息的雷达异常点云检测方法,其步骤包括:
51.步骤s1:获取道路的三维点云,得到障碍点云,通过点云训练集得到邻域的第一阈值和第二阈值;
52.步骤s2:利用第一阈值和第二阈值对三维点云进行筛选;
53.步骤s3:对筛选出来的三维点云进行空间结构分析;
54.步骤s4:将通过空间结构分析筛选出来的异常点云数据输出。
55.在具体应用实例中,所述步骤s1中包括以下流程:
56.步骤s101:基于雷达扫描构建道路三维点云描述;即,使用雷达扫描周围环境,构建基于周围场景的三维点云描述;
57.步骤s102:基于扫描三维点云描述,利用地面模型获取障碍点云;
58.步骤s103:通过点云训练集得到邻域的第一阈值和第二阈值。
59.在上述过程中,具体应用时可以在车辆行驶过程中实时获取当前点云,利用地面模型获取道路障碍点云。
60.可以理解,在上述过程中,点云不局限于激光点云,图像点云也同样适用,其也应在本发明的保护范围之内。
61.在具体应用实例中,所述步骤s2中包括:
62.遍历道路障碍点云;
63.选择第一阈值,对道路的障碍点云建立第一近邻空间邻域关系,取得第一近邻关系的空间数目或区域大小;并分析点云空间结构特征;
64.选择第二阈值,对道路的障碍点云建立第二近邻空间邻域关系,取得第二近邻关系的空间数目或区域大小;并分析点云空间结构特征。
65.选择第二阈值是在基于选择并基于第一阈值进行分析之后的过程。
66.在具体应用实例中,所述步骤s3中包括:依据所筛选的第一近邻关系评估结果和第二近邻关系评估结果,统计两者的数目比值及分析点云空间结构特征作为正常点的最终评估结果根据。
67.在具体应用实例中,所述步骤s4中包括:在最终评估结果中,将低于预设阈值(经验阈值)的点云判定为空中异常点云,对外输出。
68.在具体应用实例中,所述三维点云可以根据实际需要选择激光点云或者图像点云,又或者其他形式的点云。
69.在具体应用实例中,所述阈值训练方法可以根据实际需要来选择,例如采用统计或者机器学习的方式均可。
70.在具体应用实例中,上述邻域空间结构包括但不限于点云团物理尺寸描述、点云数目、点云有效邻域作用距离、以及点云密集度分布情况等。
71.经过统计分析,发现异常点云都是悬空的孤立点、或点集且为空间结构及点云特征有显著的共性;其主要特征包括:(1)点云的反射率低;(2)点云密度不大且悬空;(3)点云集的方向朝激光雷达方向;(4)点云集的高度差变化较小;(5)点云连续多帧都会存在的概率较低。
72.在具体应用实例中,本发明根据异常点云以上特征,主要筛选步骤如下:
73.将所有点云数据栅格化,所述栅格化是指把点云数据聚类到某个格子中),遍历每个栅格并记录包含障碍的栅格坐标。
74.遍历障碍栅格,根据第一阈值搜索附近邻域的栅格的点云,对第一邻域中的点云进行特征分析(满足上面所述的5个主要特征条件);然后,再根据第二阈值搜索附近邻域的栅格的点云密度,对第二邻域中的点云进行特征分析(满足上面所述的5个主要特征条件);最后根据第一邻域和第二邻域的点云密度的比率(即当前栅格的点云总数目和邻域内的点云总数目进行比较)以及点云特征(满足上面所述的5个主要特征条件)进行筛选。
75.如图2所示,本发明进一步提供一种基于空间邻域信息的雷达异常点云检测装置,其包括:
76.点云获取单元模块,用来获取道路的三维点云,得到障碍点云,通过点云训练集得到邻域的第一阈值和第二阈值;
77.点云邻域筛选单元,用来利用第一阈值和第二阈值对三维点云进行筛选;
78.空间特性分析单元,用来对筛选出来的三维点云进行空间结构分析;
79.异常点云输出单元,用来将通过空间结构分析筛选出来的异常点云数据输出。
80.在具体应用实例中,点云获取单元模块是通过雷达扫描构建道路三维点云描述;所述点云为激光点云或图像点云。
81.在具体应用实例中,点云邻域筛选单元执行以下流程:
82.遍历道路障碍点云;
83.选择第一阈值,对道路的障碍点云建立第一近邻空间邻域关系,取得第一近邻关系的空间数目或区域大小;并分析点云空间结构特征;
84.选择第二阈值,对道路的障碍点云建立第二近邻空间邻域关系,取得第二近邻关系的空间数目或区域大小;并分析点云空间结构特征。
85.选择第二阈值是在基于选择并基于第一阈值进行分析之后的过程。
86.以一个具体应用为例,参见图3为雨天原始点云,包含了原始点云数据,即包含了异常点云。参见图4,在处理前的图片,矩形框为当前车辆位置,正前方和左前方团点为雨点虚警。经过本发明上述方法的处理后得到图5,虚警已经处理完毕。
87.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1