一种施工环境监测系统的制作方法
1.本发明涉及环境监测领域,特别是涉及一种施工环境监测系统。
背景技术:
2.在工程施工中,需要对施工过程中的环境进行动态监测,比如监测施工环境中的粉尘含量,当粉尘含量超过规定的阈值时,会影响施工区域处的工人的身体健康。
3.中国专利公开号cn112113090a公开了一种用于施工环境的粉尘监测装置,属于粉尘监测装置技术领域,以解决现有粉尘监测装置的高度由于一般在三米以上,且不能将粉尘监测装置中的支撑立杆的高度进行有效的缩短调节,从而使得粉尘监测装置在大风环境下的稳定性较差的问题,包括:混凝土基座,所述混凝土基座内部贯穿连接有支撑滑套筒。当遇到大风环境时,通过手动将调节螺母进行转动,使支撑立杆在其下部的螺纹作用下,开始向下移动,当支撑立杆下端圆形滑动块底端面与支撑滑套筒内部底端面接触时,支撑立杆下部螺纹端进入支撑滑套筒内部,从而使本粉尘监测装置的整体高度得到有效的降低,从而使本粉尘监测装置在大风环境下具有较好的稳定性。
4.但是,上述技术方案存在如下不足:
5.粉尘监测装置固定设置在检测区域,使用不灵活,检测区域有限,当需要对其它区域进行粉尘检测时,需要设置新的粉尘监测装置,或将之前设置的粉尘监测装置拆掉并安装在新的监测位置,操作麻烦。
技术实现要素:
6.本发明目的是针对背景技术中存在的问题,提出一种能灵活的对不同区域进行粉尘监测的施工环境监测系统。
7.本发明的技术方案,一种施工环境监测系统,包括:
8.区域划分模块,用于将施工区划分出多个紧邻的监测分区;
9.远程监测无人机,用于在监测分区中心处检测粉尘含量;
10.中控平台,与区域划分模块和远程监测无人机分别通讯连接,用于接收远程监测无人机对粉尘含量的检测数据,并根据检测数据是否超过粉尘含量阈值来对相应监测分区所属安全情况进行判定,当监测分区中心处的粉尘含量超过阈值时,将该监测分区定为危险区,当监测分区中心处的粉尘含量未超过阈值时,将该监测分区定为安全区;以及
11.由中控平台远程控制以在施工区处进行警示的报警模块。
12.优选的,当监测分区为矩形时,相邻监测分区边缘无缝衔接。
13.优选的,当监测分区为圆形时,相邻两个监测分区相切,多个监测分区的圆心呈矩阵分布;施工区包括除监测分区之外的推定分区a、推定分区b和推定分区c,其中,推定分区a为相邻四个监测分区之间的区域,推定分区b为施工区一条边缘与两个靠边的监测分区之间的区域,推定分区c为施工区角落和角落的监测分区之间的区域;当推定分区a相邻的四个监测分区中至少有两个被定为危险区时,将该推定分区a定为危险区;当推定分区b相邻
的两个监测分区中至少有一个被定为危险区时,将该推定分区b定为危险区;当推定分区c相邻的监测分区被定为危险区时,将该推定分区c定为危险区。
14.优选的,远程监测无人机包括:
15.机架;
16.无线传输器,设置在机架上,与中控平台通讯连接;
17.旋翼模组,呈圆周状设置有多组,包括旋翼机构和导流管,旋翼机构和导流管均设置在机架上,导流管具有开口均朝上设置的进气端和出气端,进气端朝向旋翼机构;
18.粉尘传感器,设置在机架底部,与无线传输器通讯连接,检测端位于出气端上方;
19.缓冲机构,设置在机架上,呈圆周状设置有多组。
20.优选的,缓冲机构上设置有安装架,安装架底部设置有摄像机和透明罩,摄像机位于透明罩内侧,摄像机与无线传输器通讯连接。
21.优选的,缓冲机构包括固定架、滑动架和弹性件,滑动架顶端具有限位台部,固定架上沿竖直方向设置有供滑动架滑动的滑动通道,以及供限位台部卡入的限位通道,弹性件位于滑动通道内,弹性件竖直设置,弹性件竖直方向两端分别与固定架和滑动架连接。
22.优选的,机架上设置有太阳能板和蓄电池,太阳能板与蓄电池电性连接,蓄电池与无线传输器、旋翼机构和粉尘传感器分别电性连接。
23.优选的,导流管包括一体连接且依次连通的安装板部、斗部、连接管部和出气管部,且连通处呈弧形过渡,安装板部设置在机架上,斗部内径由上至下逐渐减小,连接管部沿由斗部底端至出气管部底端方向由上至下逐渐倾斜,出气管部朝向粉尘传感器。
24.优选的,连接管部下部设置有出水孔。
25.上述施工环境监测系统的使用方法包括如下步骤:
26.s1、利用区域划分模块将施工区划分出多个监测分区;
27.s2、通过中控平台控制远程监测无人机飞行至多个监测分区中心处依次进行粉尘含量检测,并将监测数据传输至中控平台;
28.s3、中控平台根据检测数据来对相应监测分区所属安全情况进行判定,当监测分区中心处的粉尘含量超过阈值时,将该监测分区定为危险区,当监测分区中心处的粉尘含量未超过阈值时,将该监测分区定为安全区;
29.s4、中控平台控制报警模块对施工区中的危险区进行告警提示。
30.与现有技术相比,本发明具有如下有益的技术效果:
31.本发明能灵活的对不同区域进行粉尘监测,使用方便,检测范围充分。工作人员通过中控平台使用区域划分模块对施工区进行划分,再控制远程监测无人机飞行至目的监测分区的中心处进行粉尘含量的检测,并接收远程监测无人机传输回来的粉尘检测数据,根据检测数据来将对应的监测分区判定为安全区或危险区,当判定为安全区时,工人可在对应的监测分区内进行施工作业,当判定为危险区时,中控平台控制报警模块对现场工人进行告警,使现场工人不在对应的监测分区进行施工作业。
32.远程监测无人机中,旋翼机构向下吹风,从而使远程监测无人机飞行,旋翼机构将空气吹向导流管,空气沿着导流管流通,并通过导流管出气端吹向粉尘传感器。一方面,旋翼机构处会产生空气负压,远程监测无人机周围空气中的粉尘会向旋翼机构处流通,并随空气被吹入导流管内,并最终吹到粉尘传感器处,由粉尘传感器进行检测,缩短了检测时
间,提高了检测效率,延长了远程监测无人机的使用时间。另一方面,空气向上吹粉尘传感器,会对粉尘传感器施加吹力,粉尘传感器将力传递至机架,从而有利于远程监测无人机滞空,实现了对旋翼机构制造的风力的再利用,延长了滞空时间,提升了使用时间。
附图说明
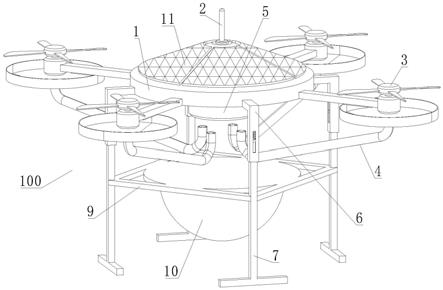
33.图1为本发明实施例中远程监测无人机的结构示意图;
34.图2为图1中导流管的结构剖视图;
35.图3为图1中固定架的减震原理图;
36.图4为使用远程监测无人机在被分成多个矩形监测区的施工区的作业示意图;
37.图5为使用远程监测无人机在被分成多个圆形监测区的施工区的作业示意图。
38.附图标记:100、远程监测无人机;1、机架;2、无线传输器;3、旋翼机构;4、导流管;401、安装板部;402、斗部;403、连接管部;4031、出水孔;404、出气管部;5、粉尘传感器;6、固定架;601、滑动通道;602、限位通道;7、滑动架;701、限位台部;8、弹性件;9、安装架;10、透明罩;11、太阳能板;12、施工区;121、监测分区;122、推定分区a;123、推定分区b;124、推定分区c。
具体实施方式
39.实施例一
40.如图1、图4和图5所示,本发明提出的一种施工环境监测系统,包括区域划分模块、远程监测无人机100、中控平台和报警模块。区域划分模块用于将施工区12划分出多个紧邻的监测分区121。远程监测无人机100用于在监测分区121中心处检测粉尘含量。中控平台与区域划分模块和远程监测无人机100分别通讯连接,用于接收远程监测无人机100对粉尘含量的检测数据,并根据检测数据是否超过粉尘含量阈值来对相应监测分区121所属安全情况进行判定,当监测分区121中心处的粉尘含量超过阈值时,将该监测分区121定为危险区,当监测分区121中心处的粉尘含量未超过阈值时,将该监测分区121定为安全区。报警模块由中控平台远程控制以在施工区12处进行警示。
41.上述施工环境监测系统的使用方法包括如下步骤:
42.s1、利用区域划分模块将施工区12划分出多个监测分区121;
43.s2、通过中控平台控制远程监测无人机100飞行至多个监测分区121中心处依次进行粉尘含量检测,并将监测数据传输至中控平台;
44.s3、中控平台根据检测数据来对相应监测分区121所属安全情况进行判定,当监测分区121中心处的粉尘含量超过阈值时,将该监测分区121定为危险区,当监测分区121中心处的粉尘含量未超过阈值时,将该监测分区121定为安全区;
45.s4、中控平台控制报警模块对施工区12中的危险区进行告警提示。
46.本实施例能灵活的对不同区域进行粉尘监测,使用方便,检测范围充分。工作人员通过中控平台使用区域划分模块对施工区12进行划分,再控制远程监测无人机100飞行至目的监测分区121的中心处进行粉尘含量的检测,并接收远程监测无人机100传输回来的粉尘检测数据,根据检测数据来将对应的监测分区121判定为安全区或危险区,当判定为安全区时,工人可在对应的监测分区121内进行施工作业,当判定为危险区时,中控平台控制报
警模块对现场工人进行告警,使现场工人不在对应的监测分区121进行施工作业。
47.实施例二
48.本发明提出的一种施工环境监测系统,相较于实施例一,本实施例中,如图4所示,阴影区域为危险区,当监测分区121为矩形时,相邻监测分区121边缘无缝衔接,该种划分方式比较规整,多个监测分区121能组成施工区12,不会存在间隙。
49.实施例三
50.本发明提出的一种施工环境监测系统,本实施例与实施例二的区别在于,如图5所示,阴影区域为危险区,当监测分区121为圆形时,相邻两个监测分区121相切,多个监测分区121的圆心呈矩阵分布;施工区12包括除监测分区121之外的推定分区a122、推定分区b123和推定分区c124,其中,推定分区a122为相邻四个监测分区121之间的区域,推定分区b123为施工区12一条边缘与两个靠边的监测分区121之间的区域,推定分区c124为施工区12角落和角落的监测分区121之间的区域;当推定分区a122相邻的四个监测分区121中至少有两个被定为危险区时,将该推定分区a122定为危险区;当推定分区b123相邻的两个监测分区121中至少有一个被定为危险区时,将该推定分区b123定为危险区;当推定分区c124相邻的监测分区121被定为危险区时,将该推定分区c124定为危险区。
51.本实施例中,监测分区121为圆形,远程监测无人机100处于圆心处,远程监测无人机100对粉尘的检测结果更能代表圆形监测分区121处的实际粉尘含量情况。对于施工区12中除监测分区121之外的区域,被分类成推定分区a122、推定分区b123和推定分区c124,推定分区的危险性或安全性判定结果以相邻监测分区121的粉尘含量检测结果为推定依据,能大致反应粉尘含量情况,从而保证施工区12中粉尘含量检测的全面性。
52.实施例四
53.如图1-3所示,本发明提出的一种施工环境监测系统,相较于实施例一或实施例二或实施例三,本实施例中,远程监测无人机100包括机架1、无线传输器2、旋翼模组、粉尘传感器5和缓冲机构。无线传输器2设置在机架1上,无线传输器2与中控平台通讯连接。旋翼模组呈圆周状设置有多组,旋翼模组包括旋翼机构3和导流管4,旋翼机构3和导流管4均设置在机架1上,导流管4具有开口均朝上设置的进气端和出气端,进气端朝向旋翼机构3。粉尘传感器5设置在机架1底部,粉尘传感器5与无线传输器2通讯连接,粉尘传感器5的检测端位于出气端上方。缓冲机构设置在机架1上,缓冲机构呈圆周状设置有多组。缓冲机构上设置有安装架9,安装架9底部设置有摄像机和透明罩10,摄像机位于透明罩10内侧,摄像机与无线传输器2通讯连接。
54.旋翼机构3向下吹风,从而使远程监测无人机100飞行,旋翼机构3将空气吹向导流管4,空气沿着导流管4流通,并通过导流管4出气端吹向粉尘传感器5。一方面,旋翼机构3处会产生空气负压,远程监测无人机100周围空气中的粉尘会向旋翼机构3处流通,并随空气被吹入导流管4内,并最终吹到粉尘传感器5处,由粉尘传感器5进行检测,缩短了检测时间,提高了检测效率,延长了远程监测无人机100的使用时间。另一方面,空气向上吹粉尘传感器5,会对粉尘传感器5施加吹力,粉尘传感器5将力传递至机架1,从而有利于远程监测无人机100滞空,实现了对旋翼机构3制造的风力的再利用,延长了滞空时间,提升了使用时间。
55.缓冲机构包括固定架6、滑动架7和弹性件8,滑动架7顶端具有限位台部701,固定架6上沿竖直方向设置有供滑动架7滑动的滑动通道601,以及供限位台部701卡入的限位通
道602,滑动架7能稳定的进行滑动,弹性件8位于滑动通道601内,弹性件8竖直设置,弹性件8竖直方向两端分别与固定架6和滑动架7连接。在远程监测无人机100落地时,滑动架7与地面接触,通过弹性件8缓冲受到的冲击。
56.机架1上设置有太阳能板11和蓄电池,太阳能板11与蓄电池电性连接,蓄电池与无线传输器2、旋翼机构3和粉尘传感器5分别电性连接。太阳能板11将太阳能转化为电能储存在蓄电池内,由蓄电池对各用电结构进行供电,更加节能环保。
57.导流管4包括一体连接且依次连通的安装板部401、斗部402、连接管部403和出气管部404,且连通处呈弧形过渡,有利于空气顺畅的流通。安装板部401设置在机架1上。斗部402内径由上至下逐渐减小,便于吸入空气和粉尘。连接管部403沿由斗部402底端至出气管部底端方向由上至下逐渐倾斜。连接管部403下部设置有出水孔4031,在下雨时,雨水会通过斗部402进入导流管4内,但会通过出水孔4031流出,而被旋翼机构3吹入导流管4内的空气会沿着连接管部403流通至出气管部404,实现了水气分流。出气管部404朝向粉尘传感器5,能将粉尘输送至粉尘传感器5处。
58.上面结合附图对本发明的实施方式作了详细说明,但是本发明并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本发明宗旨的前提下还可以作出各种变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1