一种多约束匹配处理器定位方法
1.本发明涉及匹配场声学定位技术领域,是一种多约束匹配处理器定位方法。
背景技术:
2.匹配场定位是近年来声学领域常用的定位方法之一。现有的匹配场定位方法是通过构建声场模型,而后算得拷贝声场,并将接收水听器所采集的声场数据与计算得到的拷贝场数据,一并代入到匹配处理器,便可得出目标的具体位置。但在进行匹配场定位时,常由于所构建的拷贝场与实际声场存在偏差,即环境失调的问题,使得目标定位结果出现偏差;或者由于水听器所采集的声场的干扰源的存在等情况,使得最终定位结果的模糊度表面存在其他干扰峰而不易搜寻目标峰点。
3.目前通用的匹配场定位方法是采用声压垂直阵或水平阵的方式进行,该种方法主要有两方面因素影响限制定位性能,一是声压水听器无法提供任何的目标声源的角度信息,必须依靠阵列信号处理的方式获取方位信息;二是对于阵列处理,尤其是匹配场定位中常用的垂直阵列,会存在倾斜、阵元深度、阵元间隔等失配问题,严重影响定位效果。
4.按照处理思路的不同,可将目前所使用的匹配场定位方法分为3类:多约束方法,子空间方法以及统计类方法。
5.而本发明所涉及的便是多约束方法。例如对于多约束处理器方法来说,其采用的是利用线性约束的方法,通过在距离深度平面内设置多个邻近点来确保其在环境失配的情况下,主瓣近似于bartlett处理器,而旁瓣则近似于mvdr。对于最小方差处理器,则是使测量数据与拷贝数据在输出噪声功率最小的意义上是最佳的。
6.由于采用以上的方法,这就使得多约束处理器在进行匹配场定位的时候,存在较多的旁瓣,或者叫干扰峰,因此对于目标峰的搜寻就变得比较麻烦;并且由于其约束区的大小或者扰动范围的选择,即环境的失配问题,对处理结果的影响也比较大,这也就使得其定位结果不一定会符合实际要求。
7.正是由于以上这些问题的存在,才需要对对该方法进行改进,以使得定位结果更加准确,定位性能更好以及使得该匹配处理器在环境失配方面的抗性更强变成了重要的研究方面。
技术实现要素:
8.本发明过改进原有的多约束处理方法,以增强该匹配处理器的定位性能与定位效果,同时增强其抗环境失配性,本发明提供了一种多约束匹配处理器定位方法,本发明提供了以下技术方案:
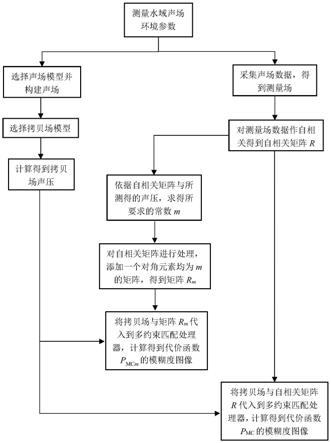
9.一种多约束匹配处理器定位方法,所述方法包括以下步骤:
10.步骤1:确定邻域约束点的个数;在进行目标水域声场采集之前,对目标水域的环境参数进行测量,包括目标水域范围的水深,声速梯度曲线,水底平坦度以及大概地形,水底底质成分,底质密度,底质衰减系数以及底质声速;
11.步骤2:根据测量水域的环境参数,采集目标信号所在水域进行声场数据,构建水域声场模型;
12.步骤3:根据构建的水域声场模型,确定拷贝场用矩阵;
13.步骤4:利用水平接收水听器阵列,对水域进行目标声源的信号水声信号采集,采集得到测量场矩阵信号f1;
14.步骤5:对测量场矩阵信号f1进行自相关计算,确定自相关矩阵r;
15.步骤6:将测量场矩阵与拷贝场矩阵以及自相关矩阵代入到多约束处理器的代价函数,得到原匹配处理器定位结果;
16.步骤7:对自相关矩阵处理前后的多约束匹配处理器的代价函数作差,得到各个声场点定位结果的差值,对目标进行较为准确的定位。
17.优选地,所述步骤3具体为:采用kraken模型或者bellhop模型,当水底平坦,并且是低频远场时,声场模型采用kraken简正波模型进行计算;而在水底存在起伏地形,并且是高频声场时,则采用bellhop射线模型计算,得的拷贝场用矩阵f2表示。
18.优选地,所述步骤6具体为:将测量场矩阵与拷贝场矩阵以及自相关矩阵代入到多约束处理器的代价函数,得到原匹配处理器定位结果通过下式表示:
[0019][0020]
优选地,所述步骤7具体为:
[0021]
步骤7.1:由自相关矩阵与测量场声压算得常数m,通过下式表示:
[0022][0023]
其中,k为接收阵元数,m为大于0的常数;
[0024]
将自相关矩阵与对角线元素均为m的对角阵相加,得到矩阵rm,rm通过下式表示:
[0025]rm
=r+m
·en
[0026]
其中,en为一个n阶单位矩阵;
[0027]
步骤7.2:将测量场矩阵与拷贝场矩阵代入到多约束处理器的代价函数,然后对测量场矩阵的自相关矩阵进行处理,得到矩阵rm,以矩阵rm代替自相关矩阵r代入到多约束处理器的代价函数之中,得到以下模糊表面表达式:
[0028][0029]
步骤7.3::将对自相关矩阵处理前后的多约束匹配处理器的代价函数作差,得到各个声场点定位结果的差值的表达式,将表达式进行变量分离与化简,则该差值等式通过下式表示:
[0030][0031]
测量场矩阵均为确定常数,令上式中的各项用以下参数代替:
[0032][0033][0034][0035]
以上述各参数表示差值函数δ
mc
,则有δ
mc
=t
·
k0+k1;
[0036]
步骤7.4:将p
mcm
的表达式进行展开并分离化简,则可以得到如下表达式:
[0037][0038][0039][0040][0041]
当环境参数在一定范围内出现偏差时,仍然对目标进行准确的定位。
[0042]
优选地,m的取值根据实际测量声场或者自相关矩阵来确定,一般在0.01—0.000001范围之间选择。
[0043]
本发明具有以下有益效果:
[0044]
本发明相比于原多约束匹配处理器的匹配场定位方法,仅需要额外对其计算过程中的自相关矩阵进行处理并计算,除此之外并未增加计算的难度与复杂性,同时使得原计算结果更加准确的与便于搜寻,大大降低了其他干扰峰或者旁瓣的对目标峰的干扰,提高了主峰的辨识度,同时由于引入了加权之后的线性匹配处理器,也使得该方法对环境失配的抗性有一定的提高。
附图说明
[0045]
图1为本发明流程框图;
[0046]
图2为构建的水域声场模型示意图;
[0047]
图3为本发明的水域声场声速曲线,该声速曲线为吉林松花湖秋季水域声速曲线;
[0048]
图4是未对测量场的自相关矩阵进行处理的多约束匹配处理器定位结果;
[0049]
图5是本发明对测量场自相关矩阵进行处理之后的多约束匹配处理器的定位结果;
[0050]
图6是本发明对测量场自相关矩阵处理前后的水深失配时的距离定位结果曲线;
[0051]
图7是本发明对测量场自相关矩阵处理前后的水域声速失配时的距离定位结果曲
线;
[0052]
图8是本发明对测量场自相关矩阵处理前后的水域底质失配时的距离定位结果曲线;
[0053]
图9是本发明对测量场自相关矩阵处理前后的水底地形失配时的距离定位结果曲线。
具体实施方式
[0054]
以下结合具体实施例,对本发明进行了详细说明。
[0055]
具体实施例一:
[0056]
根据图1至图9所示,本发明为解决上述技术问题采取的具体优化技术方案是:本发明涉及一种多约束匹配处理器定位方法。
[0057]
步骤1:在进行目标水域声场采集之前,先对目标水域的环境参数进行测量,即目标水域范围的水深,声速梯度曲线,水底平坦度以及大概地形,水底底质成分,底质密度,底质衰减系数以及底质声速;
[0058]
步骤2:根据之前测量的环境参数,构建声场模型;
[0059]
步骤3:对之前的声场模型进行计算,采用kraken模型或者bellhop模型。两种模型通常根据实际构建的声场模型进行选择。一般来说,当水底平坦,并且是低频远场时,声场模型采用kraken简正波模型对其进行计算;而在水底存在起伏地形,并且是高频声场时,则采用bellhop射线模型计算。在本实例中,采用bellhop射线模型进行拷贝场计算,并令算得的拷贝场用矩阵f2表示;
[0060]
步骤4:利用水平接收水听器阵列,对水域进行目标声源的信号水声信号采集,并令所采集到的测量场信号为f1;
[0061]
步骤5:对测量场矩阵f1进行自相关计算,得到自相关矩阵r;
[0062]
步骤6:将测量场矩阵与拷贝场矩阵以及自相关矩阵代入到多约束处理器的代价函数,得到原匹配处理器定位结果表达式如下:
[0063][0064]
步骤7:由自相关矩阵与测量场声压算得常数m,具体公式如下:
[0065][0066]
其中k为接收阵元数,m为大于0的常数,其取值根据实际情况而定,一般在0.01—0.000001范围之间选择;
[0067]
将自相关矩阵与对角线元素均为m的对角阵相加,得到矩阵rm,rm具体表达式如下:
[0068]rm
=r+m
·en
[0069]
其中,en为一个n阶单位矩阵;
[0070]
将测量场矩阵与拷贝场矩阵代入到多约束处理器的代价函数,然后对测量场矩阵的自相关矩阵进行处理,得到矩阵rm,以矩阵rm代替自相关矩阵r代入到多约束处理器的代
价函数之中,得到以下模糊表面表达式:
[0071][0072]
将对自相关矩阵处理前后的多约束匹配处理器的代价函数作差,得到各个声场点定位结果的差值的表达式,而后将表达式进行变量分离与化简,则该差值等式可表示为如下形式:
[0073][0074]
由以上的等式可以看出,由于m为之前算得的一个常数,测量场矩阵均为确定常数,由此可以令上式中的各项用以下参数代替
[0075][0076][0077][0078]
以上述各参数表示差值函数δ
mc
,则有δ
mc
=t
·
k0+k1;而通过选择合适的m,则可以使k0为一个大于0的常数,因此δ
mc
可看作为一个系数大于0的一次函数,而变量t即为原多约束处理器的匹配场定位代价函数表达式。因此,δ
mc
的大小与原匹配场定位的结果相关,原匹配场定位的p
mc
的数值越大,则δ
mc
的数值也越大;即可以有效的放大原匹配场定位中模糊表面的目标峰值大小,而对非目标峰的数值进行有效抑制,以便突出目标定位的结果,便于目标搜寻。
[0079]
将p
mcm
的表达式进行展开并分离化简,则可以得到如下表达式:
[0080][0081]
同样的,将上式中的各项作如下参数变化:
[0082][0083][0084][0085]
由上式看出,参数l接近线性匹配处理器p
cmfp
,如果把k2与k1看作权值的话,则变换之后的多约束处理器可看作是线性匹配处理器加权之后的结果。而由于线性匹配处理器在环境参数发生变化时具有较强的稳健性,因此相比于原多约束匹配处理器,改进后的多约
束方法在抗环境失配方面同样具有一定的稳健性,使得当环境参数在一定范围内出现偏差时,仍然可对目标进行较为准确的定位。
[0086]
具体实施例二:
[0087]
本次发明采用一组湖上实验数据,水域环境模型以松花湖为原型进行构建。利用上述技术方案对距离为250m,深度大约为20m的声源进行定位计算,接收水听器为10元水平阵,阵元间距为0.33m,水下目标声源信号是基频为56hz的10个线谱信号。
[0088]
步骤一:对松花湖水域声场环境参数进行测量;
[0089]
步骤二:构建声场环境模型,根据测量得知,测量水域深度大约为50m,因此这里对声场模型的水深设置为50m,水平范围设置为500m;根据水域声速梯度进行多次测量,并对测量数据进行六阶拟合,得到声速曲线如图2中所示;模型底部平坦;水底底质采用基层参数,即密度ρ=1.8g/cm3,衰减系数α=0.15db/λ,底质声速为v=1600m/s;根据以上最终得到的声场模型如图3所示;
[0090]
步骤三:设置模型声源信号为504hz的单频信号;选用该频率是因为在先前的频谱分当中,504hz处的线谱最为明显,但这些并不在本发明的讨论范围之内。因此仅需将模型声源信号设置为504hz即可,而后利用kraken模型计算声场,得到拷贝场结果;
[0091]
步骤四:对声场进行数据采集,得到测量场信号;
[0092]
步骤五:将测量场进行自相关计算,得到自相关矩阵,并将自相关矩阵与拷贝场数据代入到多约束匹配处理器,得到计算之后的模糊度图像,具体如图4所示;
[0093]
步骤六:根据之前算得的测量场自相关矩阵以及测量场声压,选择合适的常数m,这里选择m=2.2204
×
10-12
;将自相关矩阵与对角线元素均为m的对角阵相加,并将新得到的矩阵代替原自相关矩阵代入多约束匹配处理器,得到改进后的多约束匹配场定位方法的模糊度图像,如图5所示;
[0094]
对比图4所示的原多约束方法的模糊表面像与图5所示的改进后的多约束方法的模糊表面图像,可以看出,当未对测量场的自相关矩阵进行处理的时候,所得到的模糊表面中存在较多的干扰峰,整体图像显得较为凌乱,且对最大峰的辨识与搜寻存在较大影响;而当把本次发明中提出的对测量场自相关矩阵进行处理之后,得到的模糊度图像则较为清楚明晰,干扰峰得到抑制,同时旁瓣变少,而主峰则比较突出易于辨识。再结合之前所推导的差值δ
mc
的理论公式,表明本次提出的改进多约束匹配处理器定位效果的方法,其理论推导与实际运用结果相一致,对多约束匹配处理器的定位效果与定位性能具有有效的改善与提高。
[0095]
步骤七:通过仿真来模拟环境失配时的定位偏差情况,这里改设模拟声源的频率为一个1000hz的单频信号。以单一变量为原则,通过改变图3中所构建的声场模型的环境参数来模拟环境失配的情况。首先更改水域深度来模拟水深失配时的情况,水深变化范围为[40m,60m],若以50m水深为完全匹配情况,则通过仿真得到原多约束方法与改进后的多约束方法,对距离的定位的偏差百分比如图6所示;
[0096]
步骤八:以单一变量为原则,改变图3中所构建声场模型的声速参数来模拟水中声速失配时的情况。由于原模型的声速是由对水域测量结果拟合而成的声速曲线,而为了比较方便的表示不同的声速变化,这里利用等声速梯度模型来模拟对原模型的声速失配情况,新的声速模型变化范围为[1480m/s,1520m/s],由仿真得到的原多约束方法与改进后的
多约束方法对距离定位的偏差百分比如图7所示;
[0097]
步骤九:以单一变量原则,改变图3中所构建声场模型的底质参数来模拟水底底质失配时的情况。由于存在多个影响底质的参数,而同样的参数在不同的底质中又有所不同。这里仅选择底质声速的变化来模拟底质失配的情况。例如对于沉积层来说,其密度ρ=1.7g/cm3,衰减系数为α=0.13db/λ,与基层的参数相比差不多,但是当其深度在2.5m以内变化时,该底质声速的变化却在1520m/s到1580m/s不等。因此,改变原模型底质为沉积层,底质声速变化范围为[1520m/s,1580m/s],由仿真得到的原多约束方法与改进后的多约束方法对距离定位的偏差百分比如图8所示;
[0098]
步骤十:以单一变量的原则,改变图3中所构建声场模型的底质参数来模拟水底地形环境失配时的情况。由于水底地形环境多样,并且近乎无规则,无法通过具体的变化曲线或者变化参数来定量的表示地形的变化情况;因此为了模拟海底地形变化的情况,现假设存在一个三角形土坡,高为2m,底为30m,而后分别对水底地形为平坦,一个土坡,三个土坡,五个土坡以及七个土坡的情况进行仿真,各个土坡均匀分布在水底,以此来达到模拟水底地形失配的目的,由仿真得到的原多约束方法与改进后的多约束方法对距离定位的偏差百分比如图9所示;
[0099]
对比各个环境参数失配时的定位结果偏差图像,可以看出,相较于原多约束定位方法,改进后的多约束定位方法在抗环境失配方面具有一定的性能提升,稳健性更强;这与原理论推导结果相一致。
[0100]
具体实施例三:
[0101]
为了实现上述研究的目的,现提出以下技术方案:
[0102]
首先需要确定邻域约束点的个数,而约束点个数m的选取由以下公式得到:
[0103]
m=2
·ndim
+1;
[0104]
上式中n
dim
代表维数,而本次匹配场定位研究的是二维情况,即深度与水平距离两个方向,则n
dim
=2;因此可以确定,共有五个邻近声源点,其中一个是原声源点,各个声源点的取值分别为(r,z),(r
±
δr,z)(r,z
±
δz);由以上各个约束点便可得到约束矢量d,但约束矢量d的计算涉及到测量场声压,因次将于后续过程中具体讨论;
[0105]
其次,需要对目标信号所在水域进行声场数据采集,水听器个数假设为k,而这里为了简化理解与计算说明,采用测量场数据为三元垂直阵,即所采集的数据为f1=[a b c]
t
,而在实际测量时则应严格按照实际情况进行阵元个数设置;
[0106]
构建所采集的水域的声场模型;
[0107]
利用kraken简正波或者bellhop射线模型进行模拟声场计算,具体的计算方法根据声场环境与声传播模型进行选择。一般情况下近场浅海模型且海底平坦时,采用简正波模型或者射线模型均可,海底存在地形时可使用bellhop射线模型。
[0108]
从算得的拷贝声场中选择某一个列向量,这里假设其为f2=[x y z]
t
。以f2作为拷贝场的某一点的声场数据;
[0109]
对测量场矩阵进行自相关计算,得到自相关矩阵r;
[0110]
将自相关矩阵r与测量场矩阵以及拷贝场矩阵代入如下多约束处理器表达式p,得到原代价函数表达式p
mc
:
[0111][0112]
其中上式中的约束矢量d由各个邻间声源点以及原声源点的声压所确定,如果令f
1(1)
代表原声源点的声压,f
1(m)
代表其他邻近声源点的声压,则d矢量有以下表示:
[0113]
d=[d1,d2,d3,d4,d5]=[f
1(1)f1(1)
,f
1(1)f1(2)
,......,f
1(1)f1(m)
],1≤m≤m;
[0114]
将自相关矩阵的对角线元素进行相加,并将结果与一个和m有关的等式作比较,则得到常数m应满足如下不等式:
[0115][0116]
上式中m的取值根据实际声压与自相关矩阵来进行选择,一般是在0.01—0.000001之间选取,目的是为了是当后续计算中当m位于分母进行计算时,可以使结果大于零。
[0117]
将自相关矩阵r与一个对角矩阵相加,对角矩阵的对角线元素均为m,得到相加后的矩阵为rm;
[0118]
以矩阵rm代替原自相关矩阵r,代入多约束处理器的代价函数p,算得代价函数表达式p
mcm
:
[0119][0120]
然后将p
mc
与p
mcm
两者作差,就可以得到变换前后的差值表达式δ
mc
,将δ
mc
进行分离变换并简化,可以得到以下表达式:
[0121][0122]
由差值表达式δ
mc
可以看出,当m的选取可以保证第一项右侧大括号内的计算数值大于0时,该等式可看作是一个一次函数,变化量即为原mc处理器代价函数p
mc
,而变化系数则为一个大于0的常数,并且,相加常数也大于0;
[0123]
因此,根据上述情况,可以看出,代价函数变换前后的差值与原代价函数所得各个点处的数值大小相关,即峰值越大处,变换前后的差值越大,峰值越小的地方,差值越小。因此,结果相当于是变相的对目标定位结果中的干扰峰进行抑制,从而使得目标峰突出,便于进行目标搜寻。
[0124]
而除了抑制旁瓣之外,改进之后的多约束匹配场定位方法在环境失配方面的抗性也有一定的提升。即若将p
mcm
的分子项进行展开,再进行分离变化,便得到如下表达式:
[0125][0126]
由上式可以看出,p
mcm
分离变换的第二项中,大括号中的部分接近线性匹配处理器的计算表达式。因此若以表达式第一项为常数,第二项系数部分当作权值的话,则变换之后的多约束匹配处理器可看成是由线性匹配处理器在各个网格位置分别进行加权运算之后的结果。而由于线性处理器的运算对环境参数的变化情况相对来说不太敏感,故相比于原
多约束匹配场定位方法,变换之后的匹配场方法可以较为明显的降低环境失配对匹配场处理器定位性能的影响。
[0127]
以上所述仅是一种多约束匹配处理器定位方法的优选实施方式,一种多约束匹配处理器定位方法的保护范围并不仅局限于上述实施例,凡属于该思路下的技术方案均属于本发明的保护范围。应当指出,对于本领域的技术人员来说,在不脱离本发明原理前提下的若干改进和变化,这些改进和变化也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1