位置测量仪及包括其的基板处理装置的制作方法
1.本发明涉及位置测量仪及包括其的基板处理装置。
背景技术:
2.为了测量可动部件的位置(或位移),可以使用线性标度。作为线性标度,使用热变形小的物质(例如,玻璃陶瓷(glass ceramic))。
技术实现要素:
3.然而,在用于生产大型产品(例如,大型显示产品)的基板处理装置中,需要相当长(例如,3m以上)的线性标度。为了提高精度,也使用诸如(零度)的特殊材质来制造线性标度。但是,用这种特殊材质难以制造3m以上的长线型标度。
4.本发明要解决的技术问题是提供利用多个线性标度准确地测量可动部件的位置的位置测量仪及位置测量方法。
5.本发明要解决的另一技术问题是提供使用上述位置测量仪的基板处理装置。
6.本发明的技术问题不限于上述技术问题,本领域的技术人员可以通过下面的描述清楚地理解未提及的其它技术问题。
7.用于解决上述技术问题的本发明的位置测量仪的一个方面包括:第一线性标度,在第一方向上延伸;第二线性标度,在所述第一方向上延伸,并且与所述第一线性标度分离;以及头结构体,包括彼此间隔开的第一标度头和第二标度头,其中,所述头结构体在所述第一方向上移动的同时读取所述第一线性标度或所述第二线性标度,并且所述第一标度头和所述第二标度头彼此相反地启用或禁用。
8.用于解决上述另一技术问题的本发明的基板处理装置的一个方面包括:基座;基板支承单元,设置在所述基座的上表面上,并且用于支承基板;门架,与所述基座的上表面间隔开地设置;移动路径,在所述门架的一个表面上在第一方向上延伸;喷墨头单元,在沿着所述移动路径移动的同时向所述基板喷出药液的液滴;以及第一位置测量仪,用于确定所述喷墨头单元的位置,并且包括:第一线性标度,设置在所述门架的一个表面上且在所述第一方向上延伸;第二线性标度,在所述第一方向上延伸且与所述第一线性标度分离;以及头结构体,包括彼此间隔开的第一标度头和第二标度头,其中,当所述喷墨头单元沿着所述移动路径在所述第一方向上移动时,所述头结构体在与所述喷墨头单元一起移动的同时读取所述第一线性标度或所述第二线性标度,并且所述第一标度头和所述第二标度头彼此相反地启用或禁用。
9.用于解决上述技术问题的本发明的位置测量方法的一个方面包括以下步骤:提供基板处理装置,所述基板处理装置包括彼此分离且在第一方向上延伸的第一线性标度和第二线性标度、以及彼此间隔开的第一标度头和第二标度头,其中,所述第一线性标度和所述第二线性标度按顺序布置成一列,并且在所述第一线性标度与所述第二线性标度之间定位有第一边界部;以及当所述第一标度头和所述第二标度头沿着所述第一方向移动时,所述
第二标度头跟随所述第一标度头,并且所述第一标度头和所述第二标度头在所述第一标度头启用且所述第二标度头禁用的状态下沿着所述第一线性标度移动,并且当所述第一标度头经过所述第一边界部时,所述第一标度头禁用并且所述第二标度头启用。
10.其它实施例的具体事项包括在详细的说明及附图中。
附图说明
11.图1是用于说明根据本发明一实施例的位置测量仪的概念图。
12.图2是用于说明根据本发明一实施例的位置测量方法的图。
13.图3是用于说明根据本发明另一实施例的位置测量方法的图。
14.图4是用于说明根据本发明另一实施例的位置测量仪的概念图。
15.图5是用于说明根据本发明又一实施例的位置测量方法的图。
16.图6是用于说明根据本发明一实施例的基板处理装置的立体图。
17.图7是用于说明根据本发明一实施例的基板处理装置的平面图。
18.图8是用于说明图6所示的喷墨头单元和位置测量仪的图。
19.图9是用于说明根据本发明另一实施例的基板处理装置的平面图。
20.图10是用于说明根据本发明又一实施例的基板处理装置的平面图。
21.图11是用于说明根据本发明又一实施例的基板处理装置的图。
具体实施方式
22.下面,将参照附图详细描述本发明的优选的实施例。本发明的优点和特征以及实现这些优点和特征的方法将通过参照下面与附图一起详细描述的实施例而变得清楚。然而,本发明并不限于以下所公开的实施例,而是能够以彼此不同的多种形态实现,本实施例只是为了使本发明的公开完整,并向本发明所属技术领域的普通技术人员完整地告知发明的范围而提供的,本发明仅由权利要求书的范围限定。在整个说明书中,相同的附图标记指代相同的构成要素。
23.为了容易地描述如图所示的一个元件或构成要素与另一个元件或构成要素的相关关系,可以使用空间相对术语“下方(below)”、“下面(beneath)”、“下部(lower)”、“上方(above)”、“上部(upper)”等。应该理解的是,除了图中所示的方向之外,空间相对术语是还包括元件在使用或操作时的彼此不同的方向的术语。例如,当图中所示的元件被翻转时,被描述为在另一个元件的“下方(below)”或“下面(beneath)”的元件可以位于另一个元件的“上方(above)”。因此,示例性的术语“下方”可以包括下方和上方两种方向。元件也可以以另一个方向定向,由此空间相对术语可以根据定向进行解释。
24.尽管术语“第一”、“第二”等用于描述各种元件、构成要素和/或部分,但是这些元件、构成要素和/或部分显然不被这些术语所限制。这些术语仅用于区分一个元件、构成要素和/或部分与另一个元件、构成要素和/或部分。因此,以下提及的第一元件、第一构成要素或第一部分在本发明的技术思想之内显然也可以是第二元件、第二构成要素或第二部分。
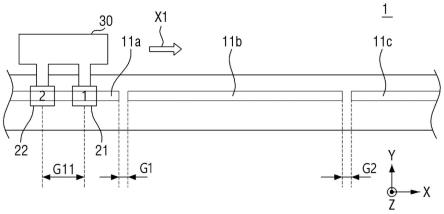
25.图1是用于说明根据本发明一实施例的位置测量仪的概念图。
26.参照图1,根据本发明一实施例的位置测量仪1包括多个线性标度(linear scale)
11a、11b、11c和头结构体30。
27.例如,多个线性标度11a、11b、11c包括第一线性标度11a、第二线性标度11b和第三线性标度11c。
28.各个线性标度11a、11b、11c在第一方向x上延伸。此外,第一线性标度11a、第二线性标度11b和第三线性标度11c布置成在第一方向x上相邻。例如,第一线性标度11a的短边和第二线性标度11b的短边可以布置成彼此面对,并且第二线性标度11b的短边和第三线性标度11c的短边可以布置成彼此面对。
29.头结构体30包括彼此间隔开的多个标度头21、22。例如,多个标度头21、22包括第一标度头21和第二标度头22。如图所示,第一标度头21和第二标度头22可以在第一方向x上间隔开地布置。
30.头结构体30可以设置于可动部件(未示出),以便与可动部件一起移动,或者可以是可动部件的一部分。例如,当头结构体30在x1方向上移动时,第一标度头21和第二标度头22可以读取多个线性标度11a、11b、11c。例如,线性标度11a、11b、11c上形成有微小的刻度,且标度头21、22向线性标度11a、11b、11c照射光并读取刻度,从而检查头结构体30(即,可动部件)的位置(或位移)。线性标度11a、11b、11c的构成或标度头21、22的读取方式不限于上述示例。任何能够检查可动部件的位置的结构和/或读取方式都可以适用。
31.此外,由于相邻的线性标度(例如,11a、11b)彼此间隔开,因此相邻的线性标度(例如,11a、11b)之间可以有第一间隙g1,并且相邻的线性标度(例如,11b、11c)之间可以有第二间隙g2。此外,标度头21、22之间也有间隔距离g11,而间隔距离g11可以大于第一间隙g1的长度或第二间隙g2的长度。
32.在根据本发明一实施例的位置测量仪1中,在多个标度头21、22都持续启用的状态下,不读取对应的线性标度(例如,11a)。
33.例如,第一标度头21和第二标度头22彼此相反地启用或禁用。
34.当第一标度头21启用并执行读取操作时,第二标度头22禁用。此外,当第二标度头22启用并执行读取操作时,第一标度头21禁用。
35.更具体地,当第二标度头22跟随第一标度头21移动时,在第一标度头21启用且第二标度头22禁用的状态下,当位于前方的第一标度头21经过第一预设位置时,第一标度头21禁用并且第二标度头22启用。接着,在第一标度头21禁用且第二标度头22启用的状态下,当位于前方的第一标度头21经过第二预设位置时,第一标度头21可以再次启用并且第二标度头22可以再次禁用。
36.这里,尽管说明了根据第一标度头21是否经过预设位置(即,第一预设位置、第二预设位置)来切换第一标度头21和第二标度头22的启用/禁用,但不限于此。例如,也可以利用第二标度头22是否经过预设位置,或者也可以利用第一标度头21和第二标度头22是否经过预设位置。
37.参照图2至图4对这种第一标度头21和第二标度头22的操作进行具体说明。
38.图2是用于说明根据本发明一实施例的位置测量方法的图。
39.参照图2(a),当头结构体30在第一方向x上移动时,第一标度头21位于前方,并且第二标度头22位于后方。即,第二标度头22会跟随第一标度头21。
40.第一标度头21和第二标度头22沿着第一线性标度11a(或在第一线性标度11a的上
侧)移动。位于前方的第一标度头21处于启用的状态,并且读取第一线性标度11a。相反,位于后方的第二标度头22处于禁用的状态。
41.参照图2(b),第一标度头21到达第一线性标度11a与第二线性标度11b之间的第一边界部。这里,第一边界部意味着第一线性标度11a与第二线性标度11b之间的第一间隙(参照图1的g1)和/或第一间隙g1的附近。
42.当第一标度头21到达第一边界部时,第一标度头21禁用,并且第二标度头22启用从而读取第一线性标度11a。
43.根据操作设定,第一标度头21可以从第一标度头21遇到第一间隙g1的时刻开始禁用,也可以在第一标度头21遇到第一间隙g1之前(例如,离遇到第一间隙g10.1m之前)禁用。
44.具体例如,假设第一线性标度11a为3m,且第一间隙g1为0.1m。在第一标度头21位于第一线性标度11a的上侧期间(即,参照图2(a)),控制器利用第一标度头21读取的位置(或刻度)来确定可动部件的位置。
45.然而,在第一标度头21位于第一间隙g1的上侧期间,第一标度头21不能读取刻度,因此控制器不能利用第一标度头21。由于控制器已经知道第一标度头21与第二标度头22之间的间隔距离(参照图1的g11)的长度,因此控制器在第二标度头22读取的位置(或刻度)上加上间隔距离g11的长度,从而确定可动部件的位置。例如,如果间隔距离g11的长度为0.2m,并且第二标度头22读取的位置为2.95m,则可动部件的位置被确定为3.15m。
46.参照图2(c),当第二标度头22到达第一边界部时,第二标度头22禁用,并且第一标度头21再次启用。第一标度头21读取第二线性标度11b。
47.参照图2(d),第一标度头21到达第二线性标度11b与第三线性标度11c之间的第二边界部。这里,第二边界部意味着第二线性标度11b与第三线性标度11c之间的间隙和/或上述间隙的附近。
48.当第一标度头21到达第二边界部时,第一标度头21禁用,并且第二标度头22启用从而读取第二线性标度11b。如上所述,控制器在第二标度头22读取的位置(或刻度)上加上间隔距离g11,从而确定可动部件的位置。
49.参照图2(e),当第二标度头22到达第二边界部时,第二标度头22禁用,并且第一标度头21再次启用从而读取第三线性标度11c。
50.图3是用于说明根据本发明另一实施例的位置测量方法的图。以下,为了便于说明,将省略与利用图1和图2说明的内容实质上相同的内容。
51.参照图3(a),当头结构体30在第一方向x上移动时,第一标度头21位于前方,并且第二标度头22位于后方。即,第二标度头22跟随第一标度头21。
52.参照图3(b),第一标度头21到达第一线性标度11a与第二线性标度11b之间的第一边界部。在第一标度头21经过第一边界部期间,第一标度头21禁用并且第二标度头22启用。控制器在第二标度头22读取的位置(或刻度)上加上间隔距离g11,从而确定可动部件的位置。
53.参照图3(c),在第一标度头21经过第一边界部之后,第一标度头21再次启用并且第二标度头22再次禁用。即,即使第二标度头22未到达第一边界部而只要第一标度头21经过第一边界部,控制器就利用第一标度头21确定可动部件的位置。
54.综上,在用特殊材质制作线性标度的情况下,难以制造3m以上的长线性标度。因
此,在根据本发明一些实施例的位置测量仪中,当需要进行3m以上的位移测量时,将多个线性标度(例如,11a、11b、11c)排成一列使用。在这种情况下,相邻的线性标度(例如,11a、11b)之间会存在间隙(例如,g1)。通过使用多个标度头21、22,且使位于间隙g1处的标度头(例如,21)禁用,并且使不位于间隙g1处的标度头(例如,22)启用,可以防止在间隙g1处可能发生的位置测量遗漏。
55.图4是用于说明根据本发明另一实施例的位置测量仪的概念图。以下,为了便于说明,将省略与利用图1说明的内容实质上相同的内容。
56.参照图4,根据本发明另一实施例的位置测量仪2包括多个线性标度11a、11b、11c、11d、11e和头结构体30。
57.例如,多个线性标度11a、11b、11c、11d、11e包括第一线性标度11a、第二线性标度11b、第三线性标度11c、第四线性标度11d和第五线性标度11e。
58.各个线性标度11a、11b、11c、11d、11e在第一方向x上延伸。此外,第一线性标度11a、第二线性标度11b和第三线性标度11c布置成一列。此外,第四线性标度11d和第五线性标度11e布置成一列。如图所示,第一线性标度11a、第二线性标度11b和第三线性标度11c以及第四线性标度11d和第五线性标度11e在第二方向y上间隔开。
59.特别地,第一线性标度11a与第二线性标度11b之间有第三间隙g3,且在第二线性标度11b与第三线性标度11c之间有第四间隙g4。第四线性标度11d布置成在第二方向y上与第三间隙g3重叠,且第五线性标度11e布置成在第二方向y上与第四间隙g4重叠。
60.头结构体30包括彼此间隔开的多个标度头21、22。例如,多个标度头21、22包括第一标度头21和第二标度头22。第一标度头21和第二标度头22可以在第一方向x和第二方向y上间隔开地布置。
61.头结构体30可以设置于可动部件(未示出),以便与可动部件一起移动,或者可以是可动部件的一部分。例如,当头结构体30在x2方向上移动时,处于启用状态的第一标度头21读取对应的线性标度11a、11b、11c,并且处于启用状态的第二标度头22读取对应的线性标度11d、11e。
62.在根据本发明另一实施例的位置测量仪2中,在多个标度头21、22处于持续启用的状态下,不读取对应的线性标度(例如,11a)。
63.例如,第一标度头21和第二标度头22可以彼此相反地启用或禁用。
64.更具体地,当第二标度头22跟随第一标度头21移动时,在第一标度头21启用且第二标度头22禁用的状态下,当第一标度头21经过第一预设位置时,第一标度头21禁用并且第二标度头22启用。接着,在第一标度头21禁用且第二标度头22启用的状态下,当第一标度头21经过第二预设位置时,第一标度头21可以再次启用并且第二标度头22可以再次禁用。
65.然而,在第二方向y上观察时,第一线性标度(例如,11a)的一部分和第四线性标度(例如,11d)的一部分可以重叠。根据设计,在这种重叠区间,可以仅第一标度头21启用、或者可以仅第二标度头22启用、或者也可以第一标度头21和第二标度头22都启用。
66.参照图5对这种第一标度头21和第二标度头22的操作进行具体说明。
67.图5是用于说明根据本发明又一实施例的位置测量方法的图。
68.参照图5(a),当头结构体30在第一方向x上移动时,第一标度头21位于前方,并且第二标度头22位于后方。第一标度头21沿着第一线性标度11a(或在第一线性标度11a的上
侧)移动。第一标度头21处于启用的状态,并且读取第一线性标度11a。相反,第二标度头22处于禁用的状态。
69.这里,第一标度头21到达第三边界部。第三边界部意味着第一线性标度11a与第二线性标度11b之间的第三间隙(参照图4的g3)和/或第三间隙g3的附近。
70.当第一标度头21到达第三边界部时,第一标度头21禁用,并且第二标度头22启用从而读取第四线性标度11d。为了能够进行这种读取动作,应当考虑第一标度头21与第二标度头22之间的间隔距离g11来确定第四线性标度11d的长度和位置。即,第四线性标度11d应当设置在第三边界部之前至少与第三边界部相距间隔距离g11的位置。
71.参照图5(b),当第二标度头22到达第四线性标度11d的终点时,第二标度头22禁用并且第一标度头21再次启用。第一标度头21读取第二线性标度11b从而确定可动部件的位置。
72.与图示不同地,即使第二标度头22未到达第四线性标度11d的终点而第一标度头21经过第三边界部,控制器也可以利用第一标度头21确定可动部件的位置。
73.以下,对利用图1至图5说明的位置测量仪所适用的示例进行说明。图6至图8是适用于喷墨头单元的示例,图9是适用于喷嘴检查单元的示例,以及图10是适用于头清洗单元的示例。图11是适用于移送模块的示例。
74.图6和图7分别是用于说明根据本发明一实施例的基板处理装置的立体图和平面图。图8是用于说明图6所示的喷墨头单元和位置测量仪的图。
75.参照图6和图7,根据本发明一实施例的基板处理装置5包括基座b、基板支承单元100、门架200、门架移动单元300、喷墨头单元400、头移动单元500、药液供应单元600、喷嘴检查单元900、头清洗单元1000和第一位置测量仪401(参见图8)。
76.基座b可以设置为具有一定厚度的长方体形状。基座b的上表面上布置有基板支承单元100。基板支承单元100具有用于放置基板s的支承板110。支承板110可以是四边形形状的板。旋转驱动部件120连接于支承板110的下表面。旋转驱动部件120可以是旋转电机。旋转驱动部件120以与支承板110垂直的旋转中心轴为中心旋转支承板110。当支承板110通过旋转驱动部件120旋转时,基板s可以通过支承板110的旋转而旋转。
77.支承板110和旋转驱动部件120可以通过直线驱动部件130在第二方向ii上直线移动。直线驱动部件130包括滑块132和引导部件134。旋转驱动部件120设置在滑块132的上表面上。引导部件134在基座b的上表面的中心部沿着第二方向ii延伸。滑块132中可以内置有线性电机(未示出),并且滑块132通过线性电机(未示出)沿着引导部件134在第二方向ii上直线移动。
78.门架200设置在支承板110移动的路径的上部。门架200从基座b的上表面向上方间隔开地布置,并且门架200布置成长度方向朝向第一方向i。喷墨头单元400通过头移动单元500连接到门架200。喷墨头单元400可以通过头移动单元500在门架的长度方向(即,第一方向i)上直线移动。可选地,也可以在第三方向iii上直线移动。喷墨头单元400通过药液供应单元600接收药液(或液滴)。此外,门架200的上表面200b和/或侧表面200a上设置有用于使喷墨头单元400和头移动单元500在第一方向i上移动的轨道501。轨道501被描述为喷墨头单元400和头移动单元500的移动路径的示例,但不限于此。任何使喷墨头单元400和头移动单元500移动的方式都可以适用。
79.另一方面,尽管示出了门架200通过门架移动单元300在第二方向ii上移动,但不限于此。根据设计,门架200可以被固定。
80.喷嘴检查单元900可以布置在基座b上的基板支承单元100的一侧。喷嘴检查单元900通过光学检查来确认喷墨头单元400中的至少一个个别喷嘴是否存在异常。例如,如果由药液(液滴)喷出量测量单元(未示出)整体上测量药液喷出量从而判断为存在异常,则喷嘴检查单元900可以确认喷墨头单元400中的至少一个个别喷嘴存在异常。
81.头清洗单元1000可以布置在基座b上的基板支承单元100的一侧。头清洗单元1000执行清洗(purging)工艺和吸入(suction)工艺。清洗工艺是以高压喷射容纳于喷墨头单元400内部的液滴的一部分的工艺。吸入工艺是在清洗工艺之后吸入去除残留在喷墨头单元400的喷嘴表面上的液滴的工艺。
82.这里参照图8,用于使喷墨头单元400和头移动单元500在第一方向i上移动的轨道501沿着第一方向i延伸,并且设置在门架200的侧表面200a上。
83.第一位置测量仪401用于确定喷墨头单元400的位置,并且包括多个线性标度411以及第一标度头421、第二标度头422。在图8中,第一位置测量仪401的形状与图1中的位置测量仪1的形状实质相同,但不限于此。例如,也可以是第一标度头421设置在喷墨头单元400的一侧(例如,右侧),并且第二标度头422设置在喷墨头单元400的另一侧(例如,左侧)。或者,也可以具有与图4中的位置测量仪2实质相同的形状。
84.第一位置测量仪401的操作方法与利用图1至图5说明的操作方法实质相同。
85.例如,当喷墨头单元400沿着轨道501在第一方向i上移动时,多个标度头421、422在与喷墨头单元一起移动的同时读取多个线性标度411,并且多个标度头421、422彼此相反地启用或禁用。
86.具体地,多个线性标度411包括按顺序布置成一列的第一线性标度和第二线性标度。在第一线性标度与第二线性标度之间定位有第一边界部。在第一标度头421启用且第二标度头422禁用的状态下,第一标度头421和第二标度头422沿着第一线性标度移动。
87.在第一标度头421经过上述第一边界部期间,第一标度头421禁用并且第二标度头422启用。在第一标度头421经过第一边界部之后,第一标度头421可以再次启用并且第二标度头422可以再次禁用。
88.或者,当第一标度头421经过第一边界部时,第一标度头421可以禁用并且第二标度头422可以启用,且当第二标度头422经过第一边界部时,第一标度头421可以再次启用并且第二标度头422可以再次禁用。
89.图9是用于说明根据本发明另一实施例的基板处理装置的平面图。为了便于说明,将主要描述与利用图6至图8描述的特征不同的特征。
90.参照图9,在根据本发明另一实施例的基板处理装置6中,喷嘴检查单元900可以沿着第二方向ii移动。第二位置测量仪901用于确定喷嘴检查单元900的位置,并且包括多个线性标度和多个标度头。线性标度可以在基座b上在喷嘴检查单元900的移动路径(例如,轨道)的旁边排成一列,并且多个标度头可以是设置在喷嘴检查单元900的主体上的形态,但不限于此。在多个标度头沿着多个线性标度移动的同时,在预设的第一位置处,一部分标度头可以禁用,并且另一部分标度头可以启用,且在预设的第二位置处,上述一部分标度头可以再次启用,并且上述另一部分标度头可以再次禁用。
91.图10是用于说明根据本发明又一实施例的基板处理装置的平面图。为了便于说明,将主要描述与利用图6至图8描述的特征不同的特征。
92.参照图10,在根据本发明又一实施例的基板处理装置7中,头清洗单元1000可以沿着第二方向ii移动。第三位置测量仪1001用于确定头清洗单元1000的位置,并且包括多个线性标度和多个标度头。线性标度可以在基座b上在头清洗单元1000的移动路径(例如,轨道)的旁边排成一列,并且多个标度头可以是设置在头清洗单元1000的主体上的形态,但不限于此。在多个标度头沿着多个线性标度移动的同时,在预设的第三位置处,一部分标度头可以禁用,并且另一部分标度头可以启用,且在预设的第四位置处,上述一部分标度头可以再次启用,并且上述另一部分标度头可以再次禁用。
93.此外,尽管未在附图中示出,但是门架200可以被固定,且基板支承单元100(即,支承板110)可以沿着第二方向ii移动,且第四位置测量仪可以设置在基板支承单元100的周围并检测支承板110的位置。第四位置测量仪包括多个线性标度和多个标度头。线性标度可以在支承板110的移动路径的旁边排成一列,并且多个标度头可以是设置在支承板110上的形态,但不限于此。在多个标度头沿着多个线性标度移动的同时,在预设的第五位置处,一部分标度头可以禁用,并且另一部分标度头可以启用,且在预设的第六位置处,上述一部分标度头可以再次启用,并且上述另一部分标度头可以再次禁用。
94.图11是用于说明根据本发明又一实施例的基板处理装置的图。为了便于说明,将省略与利用图6至图10说明的内容实质相同的内容。
95.参照图11,根据本发明又一实施例的基板处理装置8可以是用于移动基板的移送模块。
96.主移送机器人1140包括移送手1142和水平驱动部1144。水平驱动部1144可以沿着移送轨道1146直线移动。尽管未示出,但是还可以设置另外的垂直驱动部和旋转驱动部,使得移送手1142可以执行垂直或旋转操作。
97.第五位置测量仪1130可以确定主移送机器人1140的位置。第五位置测量仪包括多个线性标度1110和多个标度头1131、1132。多个线性标度1110可以在移送轨道1146上排成一列,并且多个标度头1131、1132可以是设置在主移送机器人1140的水平驱动部1144上的形态,但不限于此。在多个标度头1131、1132沿着多个线性标度1110移动的同时,在预设的第七位置处,一部分标度头可以禁用,并且另一部分标度头可以启用,且在预设的第八位置处,上述一部分标度头可以再次启用,并且上述另一部分标度头可以再次禁用。
98.以上参照附图对本发明的实施例进行了说明,但是本发明所属技术领域的普通技术人员应该可以理解,本发明在不改变其技术思想或必要特征的情况下,能够以其他具体形态实施。因此,应该理解,以上描述的实施例在所有方面都是示例性的,而不是限制性的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1