一种提高飞机重心测量精确度的方法与流程
1.本发明属于飞机重心测量技术领域;具体涉及一种提高飞机重心测量精确度的方法
背景技术:
2.飞机重心是一个假设的点,假定飞机的重量都集中在这个点上并支撑起飞机,则飞机可保持平衡。飞机的俯仰、偏航和滚转三向转动都是围绕飞机的重心进行的,而且由于燃油的消耗、起落架收放等因素,飞机重心一直都改变。在实际的重量平衡工作中,通常是用%mac(平均气动弦长)来表示飞机的重心位置。保障飞机重心在设计的范围内,是保障飞行安全以及飞机使用寿命的关键因素之一。飞机重量重心测量是相对理论重心的试验验证,是各种各类飞机首飞前的一项重要地面试验,飞机重心测量的准确度直接影响着飞机的飞行安全。传统的飞机重心测量方法是将飞机三个机轮推至地面的三个电子秤上,然后将飞机起落架缓冲器(起落架固定卡箍)固定在起落架上以保持飞机起落架处于全伸长状态,通过人工操作水平测量仪对飞机水平状态进行测量,结合飞机千斤顶顶起飞机不断在飞机机轮下方增加垫块将飞机调节至水平状态。而后进行全机、空机、输油顺序等工作,结合电子秤和水平测量仪对飞机整个过程进行重心测量。该传统的方法也基本能完成对飞机重心测量工作。但是,在飞机空机和满负载飞机轮胎压缩量不一致,经常出现测量结果偏差,也就是说传统测量方法没有将飞机机轮轮胎压缩量考虑进去,导致飞机前、主机轮轮距及轴距测量存在很大误差;水平测量尺一般用常规光学经纬仪进行读数测量,人为误差很大,测量飞机重心不准确,无法保障飞机生产质量,严重时影响了飞机的飞行安全。并且,在测量多型飞机重心时,需要给飞机起落架安装起落架缓冲器(起落架固定卡箍),效率低,耗时长,称重过程复杂,操作不方便,人工成本比较高,基本都需要人工参与,人为误差比较多等现象,影响了飞机生产效率。
技术实现要素:
3.针对现有技术重的需求,本发明提供一种能减少飞机重心测量工作量,提高飞机重心测量工作效率,确保飞机重心测量精确度的对提高飞机重心测量精确度的方法。
4.一种提高飞机重心测量精确度的方法,包括以下步骤:(1)将超薄记忆材料放在地称平台上且可以使机轮全部压到的位置,所述超薄记忆材料可以给数据处理移动终端传输信号,可以采集机轮压力引起的变形轮廓,通过压力信号转、电压信号转换为数据处理移动终端的图像信号;(2)将地称进行自身调平并校零位,所述地秤下端安装有升降机构和数显水平电子尺,所述升降机构具有单独升降以及多个联合升降且锁定的功能,通过读取所述数显水平电子尺的数据,判断地秤的水平情况,水平调整完毕后,将所述升降机构进行锁定,通过数据处理移动终端将地秤进行调零位,所述数据处理移动终端通过有线或无线与地秤进行通讯;
(3)将飞机牵引至机轮对应的地称平台上,负责转弯的机轮偏转角度为零度;(4)将数显水平电子尺安装至飞机纵轴线零点及飞机设计要求的其它指定位置;所述数显水平电子尺安装需要与飞机对称面平行,所述飞机设计要求是指在满足飞机称重的情况,调节水平时需要测量的点位;(5)通过飞机上的数显水平电子尺判断飞机机轮所在平面的高低,随机选一个地称所在平面为基准,将其它地秤的升降机构作为整体进行调节,调节水平过程依据飞机模型特征,所述飞机模型特征是指,机轮所在平面升降一个单位高度,其它机轮所在平面的升降高度对应一个比例;(6)通过数据处理移动终端采集地称的读数,将超薄记忆材料传输的图像信号进行处理,得到机轮压痕的几何图形重心,同时反馈到超薄记忆材料表面;(7)将飞机牵引离开每一个地称;(8)通过激光测距仪测量轴线的距离,所述轴线是指垂直于每一个机轮压痕的几何图形且经过几何图形重心的线,将所测距离数据输入数据处理移动终端;(9)通过数据处理移动终端将测量的重量和距离数据进行集中处理,依据力矩的平衡原理进行解算得出飞机重心在纵轴线的位置。
5.本发明的有效效果:为解决目前飞机重心测量过程繁琐,计算误差大等问题,本发明提供的一种提高飞机重心测量精确度的方法:能够实现飞机调节水平及称重过程不需要顶起飞机;适用于大小不同吨位多型飞机重心测量;飞机状态固定不需要卡箍支撑;轮距与轴距测量考虑了轮胎的压缩变形;实现轮距、轴距、重量的准确测量。
附图说明
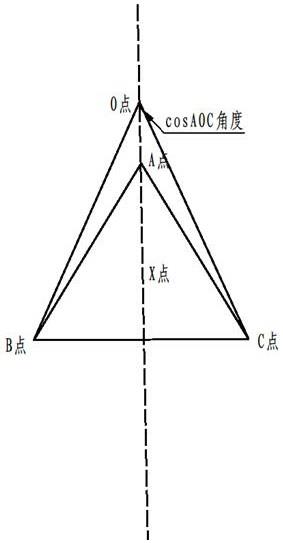
6.图1为前三点式起落架原理图
具体实施方式
7.下面对本发明的技术方案进一步说明。
8.一种提高飞机重心测量精确度的方法,其特征在于,包括以下步骤:(1)选取适当大小的超薄记忆材料,将超薄记忆材料平整的放在地秤平台上,确保机轮可以完全压在超薄记忆材料表面;进一步的,所述超薄记忆材料可以通过无线或有线方式给数据处理移动终端传输信号,超薄记忆材料可以采集机轮压力引起的变形轮廓,无论每个机轮安装的轮胎数目多少,依据现有飞机机轮设计,所述变形轮廓为矩形,通过压力信号和电压信号转换,成为数据处理移动终端的图像信号;(2)将地称进行自身调平并校零位;进一步的,所述地秤下端安装有升降机构和数显水平电子尺,所述升降机构可以是机械液压千斤顶、电动千斤顶、弹簧式千斤顶等;进一步的,所述升降机构具有单独升降以及多个联合升降且锁定的功能,升降机构的安装平面与地秤平台的上平面平行,升降机构使用的数量根据飞机的重量确定,地秤数量不少于三个,每一个地秤使用的升降机构不少于三个,目的是使调节过程安全稳定;进一步的,所述数显水平电子尺安装在地秤平台上表面或者侧面,以便于观察读
数,根据数显水平电子尺的使用规范及判读方式,通过读取数显水平电子尺的数据,判断地秤的水平情况,逐步调节升降机构,水平调整完毕后,将升降机构全部进行锁定,地秤自身调节水平可以保证机轮受到地秤的支持力的方向垂直于地秤平台所在的平面;进一步的,所述数据处理移动终端通过有线或无线与地秤进行通讯,通过数据处理移动终端将地秤进行调零位;(3)将飞机牵引至机轮对应的地称平台上,负责转弯的机轮偏转角度为零度;进一步的,所述飞机起落架结构形式分为前三点式、后三点式、多点式等,地秤所需的数量及摆放的位置依据飞机起落架的结构形式确定;(4)将数显水平电子尺安装至飞机纵轴线零点及飞机设计要求的其它指定位置;所述数显水平电子尺安装需要与飞机对称面平行,所述飞机设计要求是指在满足飞机称重的情况,调节水平时需要测量的点位;进一步的,所述测量的点位是根据飞机模型设计,调节水平需要测量机身同侧多个测量点,机翼对称位置多个测量点;(5)通过飞机上的数显水平电子尺判断飞机机轮所在平面的高低,随机选一个地称所在平面为基准,将其它地秤的升降机构作为整体进行调节,调节水平过程依据飞机模型特征,所述飞机模型特征特征是指,机轮所在平面升降一个单位高度,其它机轮所在平面的升降高度对应一个比例;进一步的,所述随机选一个地称所在平面,可以是最高平面,可以是最低平面,也可以是中间高度平面;进一步的,所述将升降机构作为整体调节,是保证每一个地秤所在平面同时升降,并且地秤的升降机构可以整体调节是地秤必备的功能;进一步的,所述飞机数模的特征:以前三点式起落架为例,前机轮地秤所在平面调节一个单位高度,主机论变化会对应一个特定的高度(比如1:1、1:2、1:3等),变化比例是飞机设计决定的,属于飞机固有参数,一般情况下左右主机论按照1:1经过适当调节就可以将飞机顺航向左右调节水平;进一步的,后三点式与前三点式调节水平原理相同;进一步的,多点式与前三点式或后三点式调节水平原理基本相同,飞机机轮站位遵循对称分布;(6)通过数据处理移动终端采集地称的读数,将超薄记忆材料传输的图像信号进行处理,得到机轮压痕的几何图形重心,同时反馈到超薄记忆材料表面;进一步的,所述机轮压痕的几何图形重心是指超薄记忆材料表面形成的矩形的重心,数据处理移动终端会把重心位置以亮点的形式展现在超薄记忆材料表面;进一步的,以前三点式起落架为例,前地秤读数g1,左地秤读数g2,右地秤读数g3,飞机总重量为g,前地秤压痕几何重心a,左地秤压痕几何重心b,右地秤压痕几何重心c;进一步的,以后三点式起落架为例,后地秤读数g4,前左地秤读数g5,前右地秤读数g6,飞机总重量为g,后地秤压痕几何重心d,前左地秤压痕几何重心e,前右地秤压痕几何重心f;进一步的,以四点式起落架为例,前左地秤读数g7,前右地秤读数g8,后左地秤读数g9,后右地秤读数g10,飞机总重量为g,前左地秤压痕几何中心h, 前右地秤秤压痕几何
重心i,后左地压痕几何重心j,后右地称压痕几何重心k;(7)将飞机牵引离开每一个地称;(8)通过激光测距仪测量轴线的距离,所述轴线是指垂直于每一个机轮压痕的几何图形且经过几何图形重心的线,将所测距离数据输入数据处理移动终端;进一步的,所述激光测距仪随机水平放置于任一压痕几何重心位置(所述a或b或c或 d),在其它几何重心位置放置一个适当长度的参考物,参考物垂直于地秤所在平面,参考物等效于所述轴线;进一步的,以前三点式起落架为例,三个几何重心的距离可以表示为ab=l1,ac=l2,bc=l3;进一步的,以后三点式起落架为例,三个几何重心的距离可以表示为de=l4,df=l5,ef=l6;进一步的,以四点式起落架为例,四个几何重心的距离可以表示为hi=l7,hj=l8,ik=l9,jk=l10;(9)通过数据处理移动终端将测量的重量和距离数据进行集中处理,依据力矩的平衡原理进行解算得出飞机重心在纵轴线的位置。
9.进一步的,以前三点式起落架为例,飞机重心在地秤平台所在平面的投影沿飞机轴线方向的点为o,飞机纵轴线零点在地秤平台所在平面的投影为x,分别经过投影o点、x点、a点、b点、c点且垂直于地秤平台所在平面的轴线距离ox=l, oa=l11, oc=l12, ac=l2;进一步的,在平面三角形oac中,利用余弦定理公式得出cos∟aoc=(l211+l22-l212)/2*l11*l2进一步的,以o0为力矩支点,通过力矩平衡原理得出,解算出l,g= g1+g2+g3,,l=(g1*l7+(g2+g3)*l5)* cos∟aoc /g,其中左地秤读数g2与右地秤读数g3的差值引起的起落架压缩量已经忽略,原因是飞机的对称性设计,见图1;进一步的,以后三点式起落架为例和以四点式起落架为例,结果基本类似。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1