一种基于蝙蝠算法的介质目标电磁探测方法
1.本发明涉及电磁技术领域,尤其是涉及一种基于蝙蝠算法的介质目标电磁探测方法。
背景技术:
2.电磁反演方法的过程是在成像区域外发射电磁波,并通过接收的回波信号探测未知目标的大小、位置和轮廓信息。逆散射作为一种非接触式成像或者探测技术,已广泛应用于地下探测、雷达、医学成像等诸多领域。不断增长的应用需求推动了电磁学的基础研究。经典电磁逆散射算法基于实际测量数据与目标物体的成像预测分布对应的散射数据之间的差异,通过添加合适的正则化项来确定成本函数。由于逆问题具有非线性和不适定性,是电磁散射问题中最困难和关键的一步,前人提出了一些确定性技术和随机技术来解决逆散射问题。
3.在良好的观测环境、丰富的激励光源和简单的散射目标结构条件下,确定性的算法如牛顿法,共轭梯度法可以有效地融合到最佳解决方案中,并且计算效率高。但是,在实际应用方案中,噪音和激发波的限制等因素不容忽视。完全依赖梯度信息的确定性算法可能落入局部最优,无法获得理想结果。
4.不同于确定性算法,在未知环境下,我们提出将随机优化算法与微波成像算法相结合来解决电磁逆散射问题,如遗传算法(genetic algorithm,ga)和粒子群算法(particle swarm optimization,pso)等。随机因素的引入扩大了求解空间的搜索范围,使得随机优化算法可以跳出局部最优,解决上述问题。
5.群智能优化算法来源于生物进化,模拟了生物的行为,如觅食,探索,并且优化过程被随机因素所影响。种群中的个体通过随机搜索和信息交换逐渐接近最佳位置。研究人员通过将电磁逆散射问题转化为非线性优化问题,定义适当的成本函数,使用粒子群优化算法去解决。蝙蝠算法(bat algorithm,ba)是2010年提出的一种新兴的群智能算法。它模仿了蝙蝠利用回声定位能力的觅食过程。它结构简单,参数少,易于理解和实现。ba算法的应用广泛,包括能源管理、路径规划、旅行推销员问题等。
技术实现要素:
6.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于蝙蝠算法的介质目标电磁探测方法,将目标散射体的形状作为先验信息,大大提高了图像重建的准确度。
7.本发明的目的可以通过以下技术方案来实现:
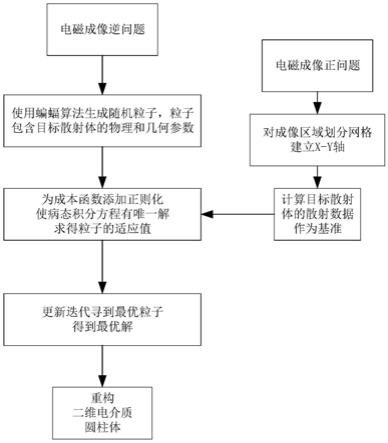
8.一种基于蝙蝠算法的介质目标电磁探测方法,具体包括以下步骤:
9.s1、构建微波成像模型,设定目标散射体和成像区域d;对成像区域d建立x-y坐标系,划分矩形网格以便数值计算;根据正向和逆向电磁散射积分方程推导出散射场公式;
10.s2、根据散射场公式计算目标散射体的散射数据作为基准数据m;将逆散射问题转
化成优化问题计算,根据其基准数据m与目标散射体的实验散射数据的差值构建成本函数,所述成本函数中设有正则化项;
11.s3、根据成像区域d的大小,设定粒子的速度和位置范围;初始化随机粒子,基于蝙蝠算法对随机粒子进行迭代更新,根据最终得到的最优粒子重构出目标散射体。
12.所述步骤s1中向电磁散射积分方程和逆向电磁散射积分方程根据麦克斯韦方程组与本构方程推导得出。
13.所述步骤s1中正向电磁散射积分方程的公式如下所示:
[0014][0015]
逆向电磁散射积分方程的公式如下所示:
[0016][0017]
其中,是激励天线发射的入射波,ez是为接收端接收到的经散射过后的总场,是测量获得的散射场,s为观测点,ρr和ρ
t
分别为发射天线和接收天线在二维空间中的位置矢量,ρ
′
是成像区域中任意一点的位置矢量,g(ρr,ρ
′
;kb)为二维格林函数,kb是入射波的波数,δk(ρ
′
)代表在同一个成像区域内的波数为k和kb的入射波的差异。
[0018]
进一步地,所述目标散射体为非磁性的电介质,对应的在成像区域内的相对介电常数的分布如下所示:
[0019][0020]
其中,εr为成像区域内的相对介电常数。
[0021]
进一步地,所述发射天线和接收天线均位于成像区域的远场,在成像区域形成入射场和散射场,所述入射场的公式如下所示:
[0022][0023][0024][0025]
其中,和分别表示ρ
t
和ρr方向上的单位矢量,为一型零阶汉克尔函数。
[0026]
进一步地,所述散射场的公式如下所示:
[0027][0028]
其中,δk是δk(ρ
′
)的傅里叶变换,通过傅里叶形式将接收端接收到的散射场与
目标电介质的性质联系起来,极大地提高电磁散射问题的计算效率,目标电介质的性质包括目标散射体的位置信息与相对介电常数。
[0029]
所述步骤s2中,由于逆散射问题的积分方程是病态性的,需要将问题转换成一个优化问题去求解,因此添加正则化项优化成本函数,避免多个解的情况。
[0030]
所述步骤s2中成本函数c(an)的公式如下所示:
[0031]
c(an)=δt(an)+||f(an)-m||2[0032]
其中,an为待求的目标散射体的参数,n为公式中参数的维度,δ为正则化项的参数用来权衡正则化项的权重,f(an)为目标散射体的实验散射数据,m为标准散射数据。
[0033]
所述成本函数中右边的第一项是正则化项,相当于相对介电常数的范数,有效避免多个解的情况;右边的第二项是测量的标准散射数据和实验散射数据m之间的误差。
[0034]
所述蝙蝠算法的原理为:假定有一些虚拟的蝙蝠生活在特定空间里,每一个蝙蝠所包含的信息可以表示为一个五元向量组,即蝙蝠的位置,速度,脉冲率,响度和频率。ba算法中每一个粒子的位置表示为优化问题的候选解即介质目标的相关参数。蝙蝠在搜索过程中通过改变自己的位置去感知周围事物。在ba算法的模拟中,蝙蝠的搜索空间是d维的。当蝙蝠搜寻猎物的时候,蝙蝠为了提高觅食的效率会根据目标猎物的方向不断地调整声波的响度和频率。
[0035]
所述步骤s3中基于群智能优化算法-蝙蝠算法对随机粒子进行迭代更新的过程具体包括以下步骤:
[0036]
s301、初始化蝙蝠算法中的种群大小、迭代次数、随机粒子的位置和速度、脉冲发射率、响度和频率;
[0037]
s302、根据成本函数计算初始化后随机粒子的适应值,得到当前局部最优解,根据当前局部最优解更新随机粒子的速度和位置;
[0038]
s303、生成第一随机数rand1∈[0,1],判断第一随机数是否大于或等于当前迭代中随机粒子的脉冲发射率,若是则在当前局部最优个体附近生成新的局部最优解,否则更新随机粒子的位置;
[0039]
s304、判断随机粒子是否位于成像区域的边界之外,若是则更新随机粒子的速度,并将粒子拉回到边界上;
[0040]
s305、生成第二随机数rand2,判断第二随机数是否小于或等于当前迭代中随机粒子的响度,且相应的成本函数计算得到的适应值大于经历步骤s304后新的局部最优解,若是则将新的局部最优解作为当前局部最优解,并更新随机粒子的响度和脉冲发射率;
[0041]
s306、判断是否达到最大迭代次数,若否则转至步骤s302。
[0042]
进一步地,所述步骤s302中更新随机粒子的速度和位置的公式如下所示:
[0043]fi
=f
min
+(f
max-f
min
)*β
[0044][0045][0046]
其中,x
*
是当前局部最优解,fi是随机粒子的频率,f
max
和f
min
为随机粒子的频率的最大值和最小值,β∈[0,1]是一个随机向量,和分别为第i个随机粒子在第t次迭代的位置和速度。
[0047]
进一步地,所述步骤s304中更新随机粒子的速度的公式如下所示,给粒子一个反向速度,将不在成像区域内的随机粒子拉回成像区域内:
[0048][0049]
所述步骤s303中在当前最优个体附近生成新的局部最优解的公式如下所示:
[0050][0051]
其中,ε∈[0,1]为随机变量,a
t
为平均响度,为随机粒子更新后的位置。
[0052]
所述步骤s303中更新随机粒子的位置的公式与步骤s302中相同。
[0053]
进一步地,所述步骤s305中更新随机粒子的响度和频率的公式如下所示:
[0054][0055][0056]
其中,α和γ分别为更新响度和脉冲发射率的系数,和分别为第i个随机粒子在第t+1次迭代的响度和脉冲发射率,r
i0
为初始的脉冲发射率。
[0057]
与现有技术相比,本发明具有以下有益效果:
[0058]
本发明采用群智能优化算法-ba算法进行逆散射问题的求解,群智能优化算法比确定性优化算法更灵活,不依赖于成本函数的解析求导,并且引入随机因素可以保证解空间可以充分搜索。在优化过程中,群智能优化算法主要由自身参数控制,不受成本函数影响。ba算法分别设定各个试验解的取值范围,确定解空间的大小,防止出现没有物理意义或者不满足逆问题要求的解,同时也加快算法求解的速度和保证解的有效性。当粒子超出了搜索区域的情况,将粒子拉回边界且赋予粒子反向速度,加快粒子位置的修正调整,最终有效提高了关于电介质的图像重建的准确度,完全还原了电介质的轮廓和相对介电常数。
附图说明
[0059]
图1为本发明的流程示意图;
[0060]
图2为本发明实施例中微波成像模型的示意图;
[0061]
图3为本发明实施例中电介质圆柱体的横截面的示意图;
[0062]
图4为本发明蝙蝠算法的流程示意图;
[0063]
图5为本发明电磁散射正问题的散射场数据m图;
[0064]
图6为本发明实施例中种群规模m为10、20和30时的ba算法迭代图;
[0065]
图7为本发明实施例中目标散射体的结构示意图;
[0066]
图8为本发明实施例中目标散射体的重建结果的结构示意图。
具体实施方式
[0067]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0068]
实施例
[0069]
如图1所示,一种基于蝙蝠算法的介质目标电磁探测方法,具体包括以下步骤:
[0070]
s1、构建微波成像模型,设定目标散射体和成像区域d;对成像区域d建立x-y坐标系,划分矩形网格以便数值计算;根据正向和逆向电磁散射积分方程推导出散射场公式;
[0071]
s2、根据散射场公式计算目标散射体的散射数据作为基准数据m;将逆散射问题转化成优化问题计算,根据其基准数据m与目标散射体的实验散射数据的差值构建成本函数,成本函数中设有正则化项;
[0072]
s3、根据成像区域d的大小,设定粒子的速度和位置范围;初始化随机粒子,基于蝙蝠算法对随机粒子进行迭代更新,根据最终得到的最优粒子重构出目标散射体。
[0073]
步骤s1中向电磁散射积分方程和逆向电磁散射积分方程根据麦克斯韦方程组与本构方程推导得出。
[0074]
步骤s1中正向电磁散射积分方程的公式如下所示:
[0075][0076]
逆向电磁散射积分方程的公式如下所示:
[0077][0078]
其中,是激励天线发射的入射波,ez是为接收端接收到的经散射过后的总场,是测量获得的散射场,s为观测点,ρr和ρ
t
分别为发射天线和接收天线在二维空间中的位置矢量,ρ
′
是成像区域中任意一点的位置矢量,g(ρr,ρ
′
;kb)为二维格林函数,kb是入射波的波数,δk(ρ
′
)代表在同一个成像区域内的波数为k和kb的入射波的差异。
[0079]
目标散射体为非磁性的电介质,对应的在成像区域内的相对介电常数的分布如下所示:
[0080][0081]
其中,εr为成像区域内的相对介电常数。
[0082]
发射天线和接收天线均位于成像区域的远场,入射波照射物体后,在成像区域内形成散射场,入射场的公式如下所示:
[0083][0084][0085][0086]
其中,和分别表示ρ
t
和ρr方向上的单位矢量,为一阶零型汉克尔函数。
[0087]
通过一阶波恩近似,忽略多重散射的影响,近似认为入射波只经过一次散射就达
到接收点,推导出散射场的公式如下所示:
[0088][0089]
其中,δk是δk(ρ
′
)的傅里叶变换,通过傅里叶形式将接收端接收到的散射场与目标电介质的性质联系起来,极大地提高电磁散射问题的计算效率。
[0090]
本实施例中,目标散射体放在成像区域d中,入射天线发射tmz入射波,接收天线接收回波信号,具体的微波成像模型如图2和图3所示。
[0091]
步骤s2中,由于逆散射问题的积分方程是病态性的,需要将逆散射问题转换成一个优化问题去求解,因此添加正则化项优化成本函数,避免多个解的情况。
[0092]
步骤s2中成本函数c(an)的公式如下所示:
[0093]
c(an)=δt(an)+||f(an)-m||2[0094]
其中,an为待求的目标散射体的参数,n为公式中参数的维度,δ为正则化项的参数用来权衡正则化项的权重,f(an)为目标散射体的实验散射数据,m为标准散射数据。
[0095]
成本函数中右边的第一项是正则化项,相当于相对介电常数的范数,有效避免多个解的情况;右边的第二项是测量的标准散射数据和实验散射数据m之间的误差。
[0096]
蝙蝠算法的原理为:假定有一些虚拟的蝙蝠生活在特定空间里,每一个蝙蝠所包含的信息可以表示为一个五元向量组,即蝙蝠的位置,速度,脉冲率,响度和频率。ba算法中每一个粒子的位置表示为优化问题的候选解即介质目标的相关参数。蝙蝠在搜索过程中通过改变自己的位置去感知周围事物。在ba算法的模拟中,蝙蝠的搜索空间是d维的。当蝙蝠搜寻猎物的时候,蝙蝠为了提高觅食的效率会根据目标猎物的方向不断地调整声波的响度和频率。
[0097]
如图4所示,步骤s3中基于群智能优化算法-蝙蝠算法对随机粒子进行迭代更新的过程具体包括以下步骤:
[0098]
s301、初始化蝙蝠算法中的种群大小m、迭代次数k、随机粒子的位置xi(i=1,2
…
m)和速度vi、脉冲发射率、响度和频率,本实施例中,脉冲发射率r
i0
=0.6,响度ai=0.6;
[0099]
s302、根据成本函数计算初始化后随机粒子的适应值,得到当前局部最优解,根据当前局部最优解更新随机粒子的速度和位置;
[0100]
s303、生成第一随机数rand1∈[0,1],判断第一随机数是否大于或等于当前迭代中随机粒子的脉冲发射率,若是则在当前局部最优个体附近生成新的局部最优解,否则更新随机粒子的位置;
[0101]
s304、判断随机粒子是否位于成像区域的边界之外,若是则更新随机粒子的速度,并将粒子拉回到边界上;
[0102]
s305、生成第二随机数rand2,判断第二随机数是否小于或等于当前迭代中随机粒子的响度,且相应的成本函数计算得到的适应值大于经历步骤s304后新的局部最优解,若是则将新的局部最优解作为当前局部最优解,并更新随机粒子的响度和脉冲发射率;
[0103]
s306、判断是否达到最大迭代次数,若否则转至步骤s302。
[0104]
步骤s302中更新随机粒子的速度和位置的公式如下所示:
[0105]fi
=f
min
+(f
max-f
min
)*β
[0106][0107][0108]
其中,x
*
是当前局部最优解,fi是随机粒子的频率,f
max
和f
min
为随机粒子的频率的最大值和最小值,β∈[0,1]是一个随机向量,和分别为第i个随机粒子在第t次迭代的位置和速度,本实施例中,频率区间设置为[0,1]。
[0109]
步骤s304中更新随机粒子的速度的公式如下所示,给粒子一个反向速度,将不在成像区域内的随机粒子拉回成像区域内:
[0110][0111]
所述步骤s303中在当前最优个体附近生成新的局部最优解的公式如下所示:
[0112][0113]
其中,ε∈[0,1]为随机变量,a
t
为平均响度,为随机粒子更新后的位置。
[0114]
步骤s303中更新随机粒子的位置的公式与步骤s302中相同。
[0115]
步骤s305中更新随机粒子的响度和频率的公式如下所示:
[0116][0117][0118]
其中,α和γ分别为更新响度和脉冲发射率的系数,和分别为第i个随机粒子在第t+1次迭代的响度和脉冲发射率,r
i0
为初始的脉冲发射率,本实施例中,α=0.9,γ=0.9。
[0119]
具体实施时,在数值模拟实验中,成像区域d是一个1.5x1.5m2的矩形,对成像区域d建立x-y直角坐标系,目标散射体的中心坐标位置为(0.15m,0.14m),是一个半径为0.19m电介质圆柱体的横截面,相对介电常数为0.48。
[0120]
将成像区域划分成n=20x20=400个小方格以便数值计算。36个发射天线沿成像区域中心10米半径的圆均匀分布,以1ghz的频率的轮流发射tmz入射波,在物体周围产生电场,如图5所示。在同样位置下,36个接收天线均匀分布接收回波信号。在这次实验中,设定最大的迭代次数为k=200。种群大小m分别设置为10、20和30去观察实验结果。为了消除偶然性误差,对实验运行30次求取平均值。
[0121]
图6表示为在某一次运行下的种群规模为10、20和30时的ba算法迭代图,表示ba算法能够快速收敛。图7和图8表示在数值模拟实验中基于ba算法的重构出的预测图像与真实物体的对比。表1说明ba算法在数值模拟试验中的准确度高,能够充分还原目标散射体的轮廓,位置和相对介电常数,表1如下所示:
[0122]
表1在不同的种群规模下基于ba算法的逆问题求解结果
[0123][0124]
由表1可知,在种群规模为30的情况下,ba算法的对我们选取的四种目标物体的参数还原的准确度最高。
[0125]
此外,需要说明的是,本说明书中所描述的具体实施例,所取名称可以不同,本说明书中所描述的以上内容仅仅是对本发明结构所做的举例说明。凡依据本发明构思的构造、特征及原理所做的等效变化或者简单变化,均包括于本发明的保护范围内。本发明所属技术领域的技术人员可以对所描述的具体实例做各种各样的修改或补充或采用类似的方法,只要不偏离本发明的结构或者超越本权利要求书所定义的范围,均应属于本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1