一种目标复合探测方法与流程
1.本发明属于目标远程探测技术领域,具体涉及一种目标复合探测方法。
背景技术:
2.基于无人机的磁测系统在实现大范围测区快速测量,在探测效率方面有明 显的优势,但其仅能测量铁磁性目标,不能测量非磁性金属目标导致漏检。同 时,基于磁场数据的反演结果仅能提供目标的位置和磁矩信息,无法获取目标 的姿态或形状特征,无法实现目标识别和分类。
3.基于时间域电磁探测方法,能够测量所有的金属目标,且根据接收端电压 信号的衰减曲线可以获取目标的姿态、形状及材料等特征。但其存在处理时间 长,探测距离短的问题。
技术实现要素:
4.本发明的目的在于提供一种目标复合探测方法,该方法能够提高探测效率, 实现目标快速定位与识别。
5.实现本发明的技术方案如下:
6.一种目标复合探测方法,具体过程为:
7.步骤一、利用磁法确定目标的位置;
8.设用特征向量x=(x0,y0,z0,m
x
,my,mz)表征磁偶极子模型;
9.利用磁测系统上搭载的磁场传感器,测量空间中的磁总场信号,并对所述 磁总场信号进行预处理,然后从测量的磁总场信号中提取出目标生产的磁异常 信号δt,所述磁异常信号可以表示为:
[0010][0011]
其中,m=(m
x
,my,mz)是目标的磁矩,r=(x-x0,y-y0,z-z0)是距离矢量,(x,y,z)是传 感器的位置,(x0,y0,z0)是目标的位置,b
earth
是当地地磁场矢量,其中r为r的模值, μ0为真空磁导率;
[0012]
利用多个观测点(xi,yi,zi)处的磁异常数据δti,建立目标函数如式(2)所示, 并利用差分进化算法估计目标的特征向量x,并利用差分进化算法估计目标的特 征向量x,
[0013][0014]
步骤二、基于磁法确定目标的位置,利用电磁法获取目标的位置、形状及 姿态特征;
[0015]
设电磁数据反演的特征向量y:
[0016][0017]
其中,(x0,y0,z0)是目标的位置,是目标的偏航和俯仰角,(ki,βi,γi)i=1,2,
3是三 维磁偶极子参数;
[0018]
基于步骤一所确定的目标位置,开展局部电磁探测,获得多个观测点(xi,yi,zi) 处,接收线圈的感应电压信号d
obsi
;
[0019]
利用多个观测点(xi,yi,zi)处接收线圈的感应电压信号d
obsi
,建立目标函数如公 式(5)所示,将所述特征向量x中的位置信息作为电磁反演特征向量y中的位 置信息的初始值,利用局部优化算法列文伯格-马夸特算法估计目标的特征向量 y;
[0020][0021]
步骤三、融合特征向量x和特征向量y,获取目标的位置、形状及姿态特征。
[0022]
进一步地,本发明所述所述磁测系统搭载在无人机上。
[0023]
进一步地,本发明所述对所述磁总场信号进行预处理包括:利用低通滤波 器对所述磁总场信号进行滤波,再去除直流成分,最后对无人机平台干扰磁场 进行补偿处理。
[0024]
进一步地,本发明所述所述开展局部电磁探测由车载磁探测系统实现。
[0025]
进一步地,本发明利用6个以上的观测点(xi,yi,zi)处的磁异常数据δti建立目 标函数。
[0026]
进一步地,本发明利用9个以上的观测点(xi,yi,zi)处接收线圈的感应电压信 号d
obsi
建立目标函数。
[0027]
进一步地,当计算出特征向量y后,根据公式(4)计算出本征偶极子响应 曲线li,根据本征偶极子响应曲线li,基于所述响应曲线li获取目标的形状
[0028][0029]
进一步地,本发明采用贝叶斯估计方法融合特征向量x和特征向量y,获取 目标的位置、形状及姿态特征。
[0030]
有益效果
[0031]
本发明磁法和电磁法联合的目标探测方法,利用磁法对大范围区域进行快 速检测,基于磁法的检测结果,利用电磁法进行精确测量,本发明可以快速实 现目标的检测。
[0032]
本发明利用磁法和电磁法联合的目标探测方法,利用所构建的目标函数, 可以快速迭代寻找到最优的特征向量,从而可以准确获得目标的位置、形状及 姿态特征。
附图说明
[0033]
下面结合附图和实施例对本发明进一步说明。
[0034]
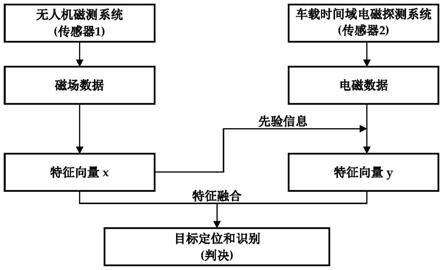
图1为联合磁法和电磁法的处理流程图;
[0035]
图2为三个待测目标(标记为4#,5#,6#);
[0036]
图3为无人机磁测数据(单位:nt);(a)测区磁场,(b)4#目标产生的磁 异常,(c)5#目标产生的磁异常,(d)6#目标产生的磁异常;
[0037]
图4为车载电磁探测系统中接收线圈的感应电压;(a)4#目标的感应电压, (b)5#目标的感应电压,(c)6#目标的感应电压;
[0038]
图5为电磁数据反演得到偶极子本征响应曲线;(a)4#目标,(b)5#目标, (c)6#目标。
具体实施方式
[0039]
下面结合附图对本发明提供的目标定位算法进行说明。
[0040]
本发明的设计思想为:图1所示,首先,磁测采用基于无人机的磁测系统 开展大范围全部测区测试,并利用磁场传感器的测量结果利用差分进化(de) 算法反演目标的特征向量x;其次,基于特征向量x中位置先验信息,开展局部 车载电磁探测,采集局部小区域的电磁数据,并依据电磁数据利用列文伯格-马 夸特算法,同时将特征向量x作为反演初值,得到特征向量y,最后,融合特征 向量x和特征向量y,获取目标的位置和形状,姿态特征。
[0041]
本技术实施例一种目标复合探测方法,具体过程为:
[0042]
步骤一、利用磁法确定目标的位置;
[0043]
利用磁偶极子模型对目标进行近似,在直角坐标系统中(东北地坐标系), 一个磁偶极子模型可以用一个特征向量x表征x=(x0,y0,z0,m
x
,my,mz),前三个参数 是目标的位置,后三个参数是目标的磁矩。)
[0044]
利用无人机磁测系统上搭载的磁场传感器,测量空间中的磁总场信号,利 用低通滤波器对磁总场信号进行滤波,然后去除直流成分,最后再对无人机平 台干扰磁场进行补偿处理,从测量的磁总场信号中提取出目标生产的磁异常信 号δt,所述磁异常信号可以表示为:
[0045][0046]
其中,m=(m
x
,my,mz)是目标的磁矩,对应特征向量x的后三个参数;(x,y,z)是传 感器的位置,(x0,y0,z0)是目标的位置,r=(x-x0,y-y0,z-z0)是距离矢量,b
earth
是当地 地磁场矢量,其中r为r的模值,μ0为真空磁导率。
[0047]
利用多个观测点(xi,yi,zi)处的磁异常数据δti(i=1,2,...n),n>6,建立目标函数 如式(2)所示,并利用差分进化算法估计目标的特征向量x,即通过设定x初 值及迭代结束的条件,基于公式(2)可以迭代计算目标的特征向量x;
[0048][0049]
步骤二、基于磁法确定目标的位置,利用电磁法获取目标的位置、形状及 姿态特征。
[0050]
在电磁数据处理中,当传感器与目标的距离大于目标尺寸的三倍时,可以 用磁偶极子模型近似,但与磁场数据处理不同的是,电磁反演中磁偶极子是随 时间变化,建立电磁数据反演的特征向量y:
[0051][0052]
其中,(x0,y0,z0)是目标的三维位置,是目标的偏航和俯仰角,(ki,βi,γi)i=1,2,3是 三维磁偶极子参数,与目标三个方向磁偶极子响应曲线li相关,关系式如公式(4) 所示。
[0053]
基于步骤一所确定的目标位置,开展局部车载电磁探测,获得多个观测点 (xi,yi,zi)处,接收线圈的感应电压信号d
obsi
,i=1,2,...n;
[0054]
利用多个观测点(xi,yi,zi)处接收线圈的感应电压信号d
obsi
,i=1,2,...n,n>9,
根 据法拉第电磁感应定律,接收线圈感应电压是目标产生的磁场随时间的导数。 由此,建立目标函数如公式(5)所示,这里将磁测反演结果特征向量x中的位 置信息作为电磁反演特征向量y中的位置信息的初始值,然后再设定特征向量y 中其余参数的初始值以及迭代结束条件,利用局部优化算法列文伯格-马夸特算 法估计目标的特征向量y;公式(5)中fi()与公式(1)和(2)中一样,均为偶极子 产生的磁场信号。
[0055][0056]
其中,电磁数据反演的特征向量y中的参数可以计算出 目标的磁矩m,计算出m后即可带入公式(1)中计算fi(y),t表示时间。
[0057]
当计算出特征向量y后,根据公式(4)计算出本征偶极子响应曲线li,根 据本征偶极子响应曲线li,基于所述响应曲线li可以获取目标的形状。
[0058][0059]
步骤三、融合特征向量x和特征向量y,获取目标的位置和形状,姿态特征。
[0060]
一般情况下,磁矩较大目标较大,因此可以根据特征向量中的磁矩,推测 出目标的大小,同时本征响应曲线可以推测出目标的形状,因此融合特征向量x 和特征向量y,获取目标的位置和形状,姿态特征。
[0061]
通过单一探测手段得到的特征向量计算结果不准确,采用贝叶斯估计方法 融合特征向量x和特征向量y,获取更加精确的目标的位置和形状,姿态特征的 后验概率,实现信息融合。
[0062]
例如根据贝叶斯理论对特征向量x中的磁矩m进行更新过程如下:
[0063]
计算磁矩的后验概率p(m|δt)
[0064][0065]
概率分布p(m)为先验信息,重现观测磁异常数据δt的能力为条件概率密度 p(δt|m),概率分布p(δt)表示为观测磁异常数据的可靠性,与测量噪声信号有关, 可以用信噪比评估。
[0066]
利用所计算的磁矩的后验概率p(m|δt)乘以磁矩m,实现了利用贝叶斯理论 对特征向量x中的磁矩m进行更新。
[0067]
同理,对特征向量x和特征向量y中的其余参量,同样计算其对应的后验 概率,并利用所计算的后验概率进行更新。
[0068]
由于特征向量x和特征向量y中都存在位置信息,因此依据贝叶斯理论, 融合后目标的位置信息概率分布满足:
[0069][0070]
p
location
为融合后目标位置的概率,和分别为磁测和电磁探测对于目标位 置的概率估计值(即后验概率)。
[0071]
图2是3个待测目标,表1给出了目标的位置和姿态信息,位置由差分gps 系统提前采集。
[0072]
表1地下目标的位置和姿态特征
[0073][0074][0075]
图3为无人机磁测数据,依据无人机磁测系统通过数据预处理获取。图3(b-d) 是测区中单个目标产生的磁异常场。根据差分进化算法,分别确定三个目标的 特征向量x,如表2所示。表中提供了目标的位置和磁矩信息,拟合度是r
2-square, 评估偶极子模型的拟合特征。
[0076]
表2磁场数据反演特征向量
[0077][0078]
图4是车载电磁探测系统中接收线圈的感应电压,分别反演三个目标的特征 向量y,如表3所示。表中给出了目标的位置,姿态特征,拟合度是r
2-square, 评估偶极子模型的拟合特征。
[0079]
表3电磁数据反演特征向量
[0080][0081]
对比表1,表2和表3,表三是联合反演得到目标位置,与目标实际位置相 比,定位精度更高,定位误差《10cm。同时,磁测反演的结果无法获取目标的姿 态信息,联合反演的结果包括目标的姿态信息,4#和5#目标反演的姿态角误差 《10
°
,6#目标反演的姿态角度误差更大,与6#目标是一个不规则形状有关。
[0082]
图5是基于电磁数据反演得到目标的偶极子本征响应曲线。图5(a-b)的三 条本征响应曲线特征相似,沿长主轴的偶极响应远大于其他两个方向的偶极响 应,并且随时间衰减更慢,方向上的偶极固有曲线两短主轴基本重合,说明4# 和5#目标可能呈柱状、具有轴对称特性。图5(c)三个方向的偶极子本征响应曲 线也随时间衰减,但衰减曲线和幅度完全不同,符合形状不规则杂波的特性。 依据反演结果中偶极子本征响应曲线实现获取目标的形状特征,实现目标分类 和识别。
[0083]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保 护范
围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等, 均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1