高分辨角速度传感器、其制作方法及应用
1.本发明涉及一种传感器,具体涉及一种高分辨角速度传感器、其制作方法及应用。
背景技术:
2.可实现自主测量的惯性技术一直是国防和国民经济建设中诸多领域的“眼睛”。基于sagnac效应的光学陀螺,因其具有全固态化、性能稳定、动态范围宽、耐冲击、抗干扰、启动快等优点,成为角速度测量的主力军。紧凑、稳定的谐振型微光学陀螺(r-mog)成为新的研究热点。由外光注入无源环形谐振腔(prr)获得顺(逆)时针传播的两束谐振光干涉构成的无源r-mog成为公认的最可行方案。因而,谐振型集成光学陀螺获得高分辨需满足两个基本条件:窄线宽激光器;高分辨角速度传感器。实现高分辨角速度传感器的基础和关键是实现大直径高品质因子(q)的prr。以低损耗材料实现高品质因子的prr成为主要解决途径。因此,自无源r-mog问世以来,国内外陆续采用多种低损材料(如sio2、玻璃、聚合物、si、soi、sin、铌酸锂和光纤)制备高品质因子prr(appl.phys.lett.,30,478-480(1977);opt.lett.,5,510-512(1980);r.adar,m.r.serbin,and v.mizrahi,j.lightw.technol.,12,1369-1372(1994);laser photonics rev.8(5)667-686(2014);j.lightw.technol.,18,66-72(2000);opt.exp.,15,17783-17797(2007);顾永娣,《集成光学陀螺谐振腔的研究与设计》,东南大学硕士学位论文;proc.spie,7381,7381q(2009);chin.phys.lett.,26,054210(2009);《中国激光》,32,1330-1332(2005);张少先,“新型集成光波导陀螺的分析与设计”,电子科技大学硕士学位论文,(2002)。)但是由于上述prr材料不能制备有源器件,该r-mog必须由其他衬底的激光器、探测器、调制器和上述prr经光纤耦合或者对接耦合混合集成,难以实现片上陀螺,且由此引入的温度波动、偏振噪声、克尔噪声使得上述r-mog实测分辨率远低于其量子极限,最终制约了集成光学陀螺性能。为了提高分辨率,各种噪声抑制技术正在研究中。
3.另一方面,基于有源无源集成优势,在同一inp衬底上通过波导耦合实现由prr、激光器、探测器、调制器单片集成的r-mog成为可能,并由此提出片上陀螺的概念。但是inp系材料高损耗使得基于inp的无源环形谐振腔品质因子止步于106,所获得角速度传感器分辨率低,不满足高分辨光学陀螺的需求,这成为最终实现inp基片上集成光学陀螺的最大障碍。
技术实现要素:
4.本发明的主要目的在于提供一种高分辨角速度传感器、其制作方法及应用,以克服现有技术的不足。
5.为实现前述发明目的,本发明采用的技术方案包括:
6.本发明的一个方面提供了一种高分辨角速度传感器,其包括半导体光学放大器和无源环形谐振腔,所述半导体光学放大器内嵌于环形谐振腔内,所述半导体光学放大器在被注入载流子时能够产生增益,从而补偿所述无源环形谐振腔自身产生的损耗。
7.在一些实施方式中,所述的高分辨角速度传感器还包括输入输出波导,所述输入输出波导与无源环形谐振腔相邻设置并相互耦合。
8.在一些实施方式中,所述半导体光学放大器包括在衬底上依次生长的缓冲层、下分别限制层、有源增益层、上分别限制层、第一包覆层和接触层;以及
9.所述无源环形谐振腔包括在衬底上依次形成的缓冲层、下分别限制层、混杂后的量子阱区、上分别限制层和第一包覆层,
10.或者,所述无源环形谐振腔包括在所述衬底上依次形成的缓冲层、无源波导层和第二包覆层。
11.在一些实施方式中,所述衬底包括si衬底、gaas衬底、inp衬底或gan衬底,优选为inp衬底。
12.在一些实施方式中,所述第一包覆层、第二包覆层的材质相同。
13.在一些实施方式中,所述半导体光学放大器和无源环形谐振腔一体设置。
14.本发明的另一个方面提供了一种高分辨角速度传感器,其包括:
15.s1、在衬底上依次生长缓冲层、下分别限制层、有源增益层、上分别限制层、第一包覆层和接触层,形成角速度传感器的材料结构;
16.s2、在所述材料结构上定义出角速度传感器的有源增益区和无源波导区,所述有源增益区、无源波导区分别对应角速度传感器的半导体光学放大器、无源环形谐振腔;
17.s3、在所述材料结构表面定义出角速度传感器的整体波导结构,并使无源波导区与输入输出波导相邻设置且形成平面耦合;
18.s4、在所述材料结构表面沉积介质膜以钝化无源波导区和输入输出波导;
19.s5、在所述介质膜对应于有源增益区的部分开设电极窗口,并利用所述电极窗口制作与所述有源增益区配合的电极;
20.s6、对步骤s5制得的器件结构进行后处理,从而获得高分辨角速度传感器。
21.在一些实施方式中,步骤s2具体包括:先在接触层上光刻出所述有源增益区和无源波导区的图案,然后利用量子阱混杂技术或者对接生长技术定义出所述有源增益区和无源波导区。
22.在一些实施方式中,所述有源增益层包括in
x
ga
1-x
asyp
1-y
层、in
x1
ga
1-x1
as
y1
p
1-y1
/inga
1-x2
as
y2
p
1-y2
多量子阱或in
x3
ga
1-x3
as
y3
p
1-y3
/in
x4
ga
y4
al
1-x4-y4
as多量子阱中的任一种,其中x、x1、x2、x3、x4、y、y1、y2、y3、y4均大于或等于0而小于或等于1。
23.本发明的另一个方面提供了所述的高分辨角速度传感器在制备谐振型微光学陀螺中的用途。
24.与现有技术相比,本发明通过将有源增益区内嵌于环形谐振腔内,实现了损耗补偿型的环形谐振腔角速度传感器,其中通过载流子注入有源增益区提供的增益补偿环内损耗,使得小尺寸环形谐振腔可获得高品质因子,有效突破inp系损耗对角速度传感器分辨率的限制,有助于获得高分辨角速度传感器,进而为实现片上集成光学陀螺奠定基础,并且该高分辨角速度传感器为整体成型半导体工艺,器件的成本低、稳定性和可靠性更高,对恶劣环境的耐受性更好。
附图说明
25.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
26.图1是本发明一实施例中一种用于构建角速度传感器的材料结构示意图。
27.图2a是本发明一实施例中通过量子阱混杂实现的一种角速度传感器的有源无源材料立体结构示意图。
28.图2b是本发明一实施例中通过对接生长实现的一种角速度传感器的有源无源材料立体结构示意图。
29.图3a-图3g分别示出了本发明一实施例中多种角速度传感器波导图案的示意图。
30.图4a-图4c分别示出了本发明一实施例中利用单片集成技术定义出的内嵌有源增益区的角速度传感器平面示意图。
31.图5为是本发明一实施例中一种角速度传感器的制备工艺流程图。
32.图6a为本发明一实施例中一种半径r=5mm的无源环形谐振腔的品质因子随有源增益区提供增益比例的变化关系图。
33.图6b为本发明一实施例中一种半径r=1cm的无源环形谐振腔的品质因子随有源增益区提供增益比例的变化关系图。
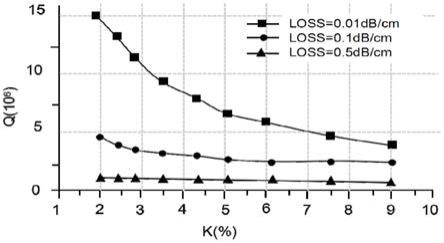
34.图7a为本发明一实施例中不同尺寸和损耗的内嵌有源增益区的角速度传感器分辨率随有源增益区提供增益比例的变化关系图。
35.图7b为本发明一实施例中不同尺寸和损耗的内嵌有源增益区的角速度传感器随机游走随有源增益区提供增益比例的变化关系图。
具体实施方式
36.鉴于现有技术的缺陷,本案发明人经长期研究和大量实践,得以提出本发明的技术方案。
37.下面结合若干优选实施例及附图对本发明的技术方案做进一步详细说明,本实施例在以发明技术方案为前提下进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
38.本实施例提供的一种高分辨角速度传感器包括半导体光学放大器和无源环形谐振腔,所述半导体光学放大器内嵌于环形谐振腔内,所述半导体光学放大器在被注入载流子时能够产生增益,从而补偿所述无源环形谐振腔自身产生的损耗。
39.其中,所述半导体光学放大器可被定义为有源增益区,而所述无源环形谐振腔可被定义为无源波导区。
40.该高分辨角速度传感器可以基于图1所示的材料结构构建,该材料结构包括在衬底1上依次生长的缓冲层2、下限制层3、有源增益层4、上限制层5、包覆层6和接触层7。其中,由接触层7到缓冲层2形成有源增益区,在此基础上,进一步通过量子阱混杂技术或者对接生长技术形成无源波导区。有源增益区用以提供增益补偿所述无源波导区内部损耗,从而获得高品质因子。
41.其中,所述衬底1可以选自si衬底、gaas衬底、inp衬底或gan衬底中的一种,且不限于此。
42.以所述衬底1为inp衬底为例,可以在inp衬底上依次生长inp缓冲层、下分别限制层、有源增益层、上分别限制层、inp包覆层和ingaas接触层,从而形成所述高分辨角速度传感器的材料结构。
43.其中,inp衬底根据需要可以是p型衬底、n型衬底或者半绝缘衬底。上、下分别限制层根据需要可以是0.01-1.5微米的ingaasp材料、ingaalas材料或者inganas材料等,该厚度和掺杂浓度和种类根据衬底种类和无源环形谐振腔的要求确定。该有源增益层根据无源环形谐振腔需求,一般是波长为1.3-1.65微米的in(ga)as(p)体材料,还可以为in(ga)as(p)/in(ga)as(p)多量子阱、或in(ga)as(p)/inga(al)as多量子阱等。该inp包覆层的掺杂和厚度根据无源环形谐振腔需求以及inp衬底的种类来确定。该ingaas接触层厚度一般在0.1-1微米之间,掺杂浓度为1*10
17-1*10
20
cm-3
,掺杂种类根据衬底掺杂情况和无源环形谐振腔自身需求确定,以满足有源增益区可正常高效加电获得增益为准。
44.本实施例中,可以利用量子阱混杂技术或者对接生长技术根据需要定义出有源增益区和无源波导区。例如,请参阅图2a示出了有源增益区和无源波导区通过量子阱混杂方式形成的立体结构,其中有源增益区没有任何变化,而无源波导区是通过对前述材料结构进行光刻、离子注入(针对量子阱层,但离子不直接注入到量子阱层)、去胶、快速热退火等量子阱混杂技术后形成,其可以包括衬底、缓冲层、下分别限制层、混杂后的量子阱区、上分别限制层和包覆层等。图2b示出了有源增益区和无源波导区通过对接生长方式形成的立体结构,其中有源增益区没有任何变化,无源波导区则是通过光刻、刻蚀掉前述材料结构中部分的有源增益层直到缓冲层,然后通过mocvd或者mbe生长宽禁带宽度的半导体材料作为无源波导层、inp包覆层。其中,宽禁带宽度半导体材料包括ingaasp、ingaalas、inganas、inalas等材料,且不限于此。
45.图3a-图3g分别示出了适用于本实施例中的一些角速度传感器波导图案。具体而言,是在图2a-图2b所示立体结构上定义出环形波导和输入输出波导图案。其中采用的加工方式可以是电子束曝光、紫外光刻、干涉光刻和纳米压印、自组装等方式中的一种或组合,且不限于此。例如,可以在光刻图案掩膜下,经干法蚀刻设备定义出环形波导和输入输出波导。其中,干法蚀刻方式包括采用反应离子刻蚀、感应耦合等离子体刻蚀和回旋共振等离子体刻蚀等多种途径,蚀刻波导形状和深度根据无源环形谐振腔的需求来定。环形波导形状包括六边形(如图3a所示)、跑道形(如图3b所示)、矩形(如图3c、图3g所示)、三角形(如图3d所示)、圆环形(如图3e、图3f所示)、菱形或不规则闭合波导形状。输入输出波导包括直波导(如图3a-图3e所示)、弯曲波导(如图3f所示)、楔形波导(如图3g所示)以及mmi波导、m-z波导以及y波导等各种可实现满足要求的输入输出且损耗尽量小的波导中的一种或多种的组合。
46.图4a-图4c分别示出了本实施例中通过进一步有源无源单片集成形成的角速度传感器的平面示意图。在图4a-图4c中,阴影部分为角速度传感器的有源增益区部分,其余部分为无源环形谐振腔部分和输入输出波导部分。该有源增益区内嵌于无源环形谐振腔中,二者通过量子阱混杂或者对接生长技术实现单片集成。由此使得有源增益区可以给整个环形谐振腔通过载流子注入来提供增益,补偿环内损耗,从而提高其品质因子,达到提高角速
度传感器分辨率的目的。
47.本实施例中一种高分辨角速度传感器如图5所示,其包括如下步骤:
48.s1,在衬底1上依次生长缓冲层2、下分别限制层3、有源增益层4、上分别限制层5、包覆层6和接触层7,形成如图1所示的材料结构。该材料结构可以用mocvd或者mbe等技术生长,整个有源增益区用以提供增益补偿无源环形谐振腔的内部损耗,从而获得高品质因子。
49.s2,在接触层上光刻出有源增益区和无源波导区部分,然后利用量子阱混杂技术或者对接生长技术定义出该角速度传感器的有源增益区和无源波导区。其中,量子阱混杂技术需要在光刻后进行离子注入、去胶、快速热退火等工艺步骤,而对接生长需要在光刻后刻蚀掉整个接触层、包覆层直到下限制层,然后利用mocvd或者mbe生长出宽禁带宽度的无源波导层和inp包覆层,由此实现角速度传感器中的有源无源单片集成。
50.s3,在步骤s2所获得的整个器件结构表面光刻刻蚀出角速度传感器的整体波导结构,如图3a-图3g中的任一者所示。其中,环形波导(即前述无源波导区)与输入输出波导相邻设置,实现平面耦合。
51.s4,按照本领域习知的方式,沉积介质膜以钝化环形波导和输入输出波导;
52.s5,按照本领域习知的方式,在有源增益区部分开介质膜窗口、电极窗口、蒸镀正面电极和背面电极;
53.s6,按照本领域习知的方式,将整个样品快速热退火、合金、解理和压焊,获得符合条件的内嵌有源增益区的的角速度传感器,如图4a-图4c所示。
54.图6a-图6b示出了利用以上方法制作的多个角速度传感器之中,无源环形谐振腔的品质因子随有源增益区提供增益比例的变化关系,可以看出,对于不同周长和不同腔损的无源环形谐振腔,通过有源增益区提供相应增益,获得无源环形谐振腔的自耦合系数大于1,该无源环形谐振腔的品质因子直线上升,均可超过106,且周长越短、腔损越小,所需提供的增益越小。
55.亦即,本实施例的环形谐振腔通过采用内嵌增益区结构,使得该无源环形谐振腔可获得部分增益,从而补偿该无源环形谐振腔的内损耗,进而真正获得低损耗甚至零损耗无源环形谐振腔,提高无源环形谐振腔的品质因子,大幅提升无源环形谐振腔作为角速度传感器的功能,并有望达到极致。
56.本实施例中内嵌有源增益区的无源环形谐振腔用作角速度传感器时,半径r=5mm(参阅图6a)、r=1cm(参阅图6b)的无源环形谐振腔的品质因子随腔内损耗和耦合系数的变化规律,可以看出,任何半径的环形谐振腔,其品质因子均随着耦合系数和传输损耗的减少而增加,内嵌增益区补偿环内损耗是减少腔内损耗的有效办法,因此,将有助于提高环形谐振腔的品质因子,甚至超过106。
57.图7a示出了不同尺寸不同损耗的环形谐振腔用作角速度传感器时,其角速度传感器的分辨率随耦合系数的变化规律。图7b示出了不同尺寸不同损耗的环形谐振腔用作角速度传感器时,其随机游走性能随耦合系数的变化规律。
58.依据图7a-图7b同样可以看出,随着传输损耗减少和耦合系数减少,角速度传感器的分辨率和随机游走性能提高,分辨率甚至优于10
°
/h,满足高精度微小陀螺的需求。通过在无源环形谐振腔内嵌有源增益区,可以利用载流子注入产生的增益有效补偿环形谐振腔损耗,使得环形谐振腔整体损耗降低,从而有效提高其用作角速度传感器时的分辨率和随
机游走性能。
59.应当理解,本发明的技术方案不限于上述具体实施案例的限制,凡是在不脱离本发明宗旨和权利要求所保护的范围情况下,根据本发明的技术方案做出的技术变形,均落于本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1