估计挂接装置铰接角的系统、方法和装置与流程
1.本技术领域大体上涉及车辆运动学建模系统、方法和装置,更具体地说,涉及在牵引操作中的各种拖挂动态事件期间,使用超声波传感器(uss)、运动学模型和其他传感器模态来估计挂接装置铰接角(hitch articulation angle(haa))的系统、方法和装置,以评估任意形状的拖车前部的信号质量和估计挂接装置铰接角(haa)。
背景技术:
2.自主、半自主和传统车辆可以设计成适应各种负载的牵引或拖挂,不同前端的拖车包括但不限于:平板车、封闭式拖车、货仓、野营车、船,有时还有其他机动车辆。此外,拖挂操作中使用了多种不同的拖车挂接装置(hitch),例如鹅颈挂接装置、重量分配挂接装置、枢轴挂接装置、接收器挂接装置和第五轮挂接装置。拖车类型和挂接装置类型的每种配置都显示不同的车辆动态。在执行牵引操作时,存在可利用的(尽管有限的)系统和设备来增强车辆和拖车的稳定性,然而,考虑到拖车和挂接装置的多种组合,没有所谓的万能解决方案,甚至没有一种解决方案可以涵盖大部分或几乎所有处于连接操作的车辆、拖车和挂钩的潜在组合。此外,为了提高众多连接组合的稳定性,制造商已经推广了基本的附加组件,例如车辆装饰件、诸如地面效应的导风板(deflector),这赋予了车辆额外的空气动力学稳定性。此外,还开发了牵引力控制系统,以及自动调节悬架系统,这些系统可根据负载重量改变车身高度。车辆牵引系统仍可能在许多方面得到改进。
3.超声波传感器(uss)传统上用于车辆的停车辅助功能。当牵引拖车时,超声波传感器(uss)阵列可用于估计挂接装置铰接角(haa)。然而,uss的实施受到限制,部分原因是实践障碍,例如信号接收噪声中的高水平干扰、除了来自拖车前部的反射之外的不期望的反射,例如挂接点(hitch point)的反射,以及不确定的拖车形状。
4.因此,希望实现具有处理原始数据的改进的uss的方法、系统和装置,以及用于在牵引拖车时至少准确估计挂接装置铰接角(haa)的附加层的信号和逻辑滤波。
5.此外,结合附图和前述技术领域和背景,从随后的详细描述和所附权利要求中,本发明的其他期望特征和特性将变得显而易见。
技术实现要素:
6.公开了一种系统、方法和设备,用于使用估计挂接装置铰接角(haa)的超声波传感器(uss)和运动学模型来估计挂接装置铰接角(haa),并且通过使用uss、运动学和其他模态比较估计的haa值来评估超声波传感器(uss)信号的质量,然后与其他传感器数据融合以估计任意形状拖车前部在牵引操作中的各种拖挂动态事件期间的挂接装置铰接角(haa)。
7.在一个示例性实施例中,提供了一种系统,该系统包括设置在车辆中的处理单元,该处理单元包括由编码在非瞬态计算机可读介质上的编程指令配置的一个或多个处理器。所述处理单元被配置为:基于检测由多个uss生成的至少一组回波信号来生成至少一组超声波传感器(uss)数据,所述多个uss被配置为围绕已经指向拖车的车辆,以确定拖车联接
到车辆的挂接装置铰接角(haa);响应于至少一组回波信号的检测,基于至少一组uss数据进行滤波,所述至少一组uss数据基于回波信号质量、以及与包括直行驾驶在内的驾驶条件的一致性、以及回波信号的转向输入的似然性(plausibility)滤波评估;响应于至少一组回波信号的滤波,通过在似然性滤波过程中使用从多组不同几何方程之一中选择的一组几何方程执行计算,基于至少一组uss数据进行估计,以确定拖车的至少任意正面形状;至少基于从检测到的关于拖车的回波信号到确定的拖车正面形状的测量距离的比较,对估计的拖车任意正面形状进行分类;以及基于至少一组uss数据估计结果生成与运动学模型的至少一个比较,以确保运动学模型对与所确定的拖车正面形状相关联的haa的结果被认为具有更高的信号性能,其中更高的信号性能基于低速下与运动学模型的相关性。
8.在至少一个示例性实施例中,该系统包括处理单元,该处理单元被配置为对至少包括直行驾驶和转向角一致性的多个驾驶条件以及对拖车正面形状的确定使用似然性滤波。
9.在至少一个示例性实施例中,该系统包括处理单元,该处理单元被配置为:移除与多个驾驶条件不一致的uss数据,该多个驾驶条件至少包括低速下的直行驾驶和转向角输入;并且对拖车正面形状进行分类,以选择用于确定haa的几何方程。
10.在至少一个示例性实施例中,该系统包括处理单元,该处理单元被配置为使用包括方向盘角度(swa)或道路车轮角度(rwa)的一组测量值来确定直行行驶状态期间从拖车正面的反射和收集的uss回波的可接受距离测量值的似然性的范围;并且基于swa或rwa测量值,建立一组似然性的范围,去除落在可接受的距离测量范围之外的uss回波。
11.在至少一个示例性实施例中,该系统包括处理单元,该处理单元被配置为通过将至少一组uss数据估计的haa结果与低速下的运动学模型导出的haa结果进行比较来优化uss数据的使用,该运动学模型导出的haa结果可以为具有相关联的确定的拖车正面形状的uss haa计算的实施过程提供质量度量。
12.在至少一个示例性实施例中,该系统包括处理单元,该处理单元被配置为在低速下使用运动学模型导出的haa和uss过程haa之间的比较,以基于可接受的阈值使用具有足够数据点的均方误差计算来确定uss的质量指标。
13.在至少一个示例性实施例中,该系统包括处理单元,该处理单元被配置为:在下述条件下使用运动学模型导出的haa和uss过程haa之间的比较来确定运动学模型的质量指标,在所述条件下,运动学模型是根据至少基于一组拖车动力学被认为无效的假设导出的,所述拖车动力学包括在较高速度下、在具有转向输入的较高速度下、作用在车辆和拖车上的阈值以上的粗糙路面条件、以及作用在车辆和拖车上的阈值以上的侧风条件的动力学;使用已经为haa结果计算的一组值和已经被确定的质量指标,将来自uss过程haa和运动学模型导出的haa的haa结果与来自多个传感器模态的haa结果融合,其中多个传感器模态至少包括视觉、雷达和uwb模态;以及基于被认为是低质量的运动学模型,将来自uss过程haa和相关质量指标的haa结果与来自多个传感器模态和相关质量指标的haa结果融合;以及基于被认为是高质量的运动学模型,将来自uss过程haa和相关质量指标的haa结果与来自多个传感器模态和相关质量指标以及运动学模型导出的haa和相关质量指标的haa结果相融合。
14.在又一个示例性实施例中,提供了一种方法,用于使用超声波传感器(uss)估计挂
接装置铰接角(haa),同时使用似然性滤波确保检测到的回波信号性能的质量。该方法包括:响应于将拖车联接到车辆,基于检测由围绕车辆配置的已经指向拖车的多个uss生成的至少一组回波信号,生成至少一组超声波传感器(uss)数据;响应于对至少一组回波信号的检测,通过对回波信号的质量和对与至少包括直行驾驶的多个驾驶条件和与回波信号的转向输入的一致性的似然性滤波评估,基于至少一组uss数据进行滤波;响应于对至少一组回波信号的滤波,通过在似然性滤波过程中使用从多个不同几何方程组之一中选择的一组几何方程执行计算,基于至少一组uss数据进行估计,以确定拖车的至少任意正面形状;至少基于从检测到的关于拖车的回波信号到确定的拖车正面形状的测量距离的比较,对估计的拖车任意正面形状进行分类;以及基于至少一组uss数据估计结果生成与运动学模型的至少一个比较,以确保运动学模型对与所确定的拖车正面形状相关联的haa的结果被认为具有较高的信号性能,其中较高的信号性能基于低速下与运动学模型的相关性。
15.在至少一个示例性实施例中,该方法包括对至少包括直行驾驶和转向角一致性的多个驾驶条件以及对拖车正面形状的确定使用似然性滤波。
16.在至少一个示例性实施例中,该方法包括移除与多个驾驶条件不一致的uss数据,所述多个驾驶条件至少包括低速下的直行驾驶和转向角输入;以及对拖车正面形状进行分类,以选择用于确定haa的几何方程。
17.在至少一个示例性实施例中,该方法包括使用包括方向盘角度(swa)或道路车轮角度(rwa)的一组测量值来确定直线行驶状态期间从拖车正面的反射和收集的uss回波的可接受距离测量值的似然性的范围;以及基于swa或rwa测量值建立一组似然性的范围,其中去除落在可接受的距离测量范围之外的uss回波。
18.在至少一个示例性实施例中,该方法包括通过将至少一组uss数据估计的haa结果与低速下的运动学模型导出的haa结果进行比较来优化uss数据的使用,该运动学模型导出的haa结果可以为具有相关联的确定的拖车正面形状的uss haa计算的实施过程提供质量度量。
19.在至少一个示例性实施例中,该方法包括在低速下使用运动学模型导出的haa和uss过程haa之间的比较,以基于可接受的阈值使用具有足够数据点的均方误差计算来确定uss的质量指标。
20.在至少一个示例性实施例中,该方法包括在下述条件下使用运动学模型导出的haa结果和uss过程haa之间的比较,以确定运动学模型的质量指标,在所述条件中运动学模型是根据至少基于一组拖车动力学被认为无效的假设导出的,该组拖车动力学包括在较高速度下、在具有转向输入的较高速度下、在作用于车辆和拖车的阈值以上的粗糙路面条件下以及作用于车辆和拖车的阈值以上的侧风条件下的动力学。
21.在至少一个示例性实施例中,该方法包括使用已经为haa结果计算的一组值和已经被确定的质量指标,将来自uss过程haa和运动学模型导出的haa的haa结果与来自多个传感器模态的haa结果进行融合,其中多个传感器模态至少包括视觉、雷达和uwb模态。
22.在至少一个示例性实施例中,该方法包括基于被认为是低质量的运动学模型,将来自uss过程haa和相关质量指标的haa结果与来自多个传感器模态和相关质量指标的haa结果进行融合。
23.在至少一个示例性实施例中,该方法包括基于被认为高质量的运动学模型,将来
自uss过程haa和相关质量指标的haa结果与来自多个传感器模态和相关质量指标以及运动学模型导出的haa和相关质量指标的haa结果进行融合(fuse)。
24.在至少一个示例性实施例中,该方法包括实现运动学模型,用于评估来自较低速度下的uss测量值的uss过程haa结果的质量,而uss过程haa结果用于评估一组拖车动态条件下的运动学模型的质量,该一组拖车动态条件至少包括较高速度下的动力学、具有转向输入的较高速度下、作用在车辆和拖车上的阈值以上的粗糙路面条件以及作用在车辆和拖车上的阈值以上的侧风条件的动力学。
25.在又一示例性实施例中,提供了一种车辆装置,包括基于通过超声波传感器(uss)估计单元的估计的挂接装置铰接角(haa),所述超声波传感器估计单元包括一个或多个处理器和用编程指令编码的非瞬态计算机可读介质。所述uss估计单元被配置为:基于检测由被配置为关于已经指向拖车的车辆的多个uss生成的至少一组回波信号来生成至少一组超声波传感器(uss)数据,其中所述拖车联接到所述车辆;响应于至少一组回波信号的检测,基于至少一组uss数据进行滤波,所述至少一组uss数据基于对回波信号的质量以及与包括回波信号的直行驾驶和转向输入的驾驶条件的一致性(consistency)的似然性滤波评估;响应于至少一组回波信号的滤波,通过在似然性滤波过程中使用从多组不同几何方程之一中选择的一组几何方程执行计算,基于至少一组uss数据进行估计,以确定拖车的至少任意正面形状;至少基于从检测到的关于拖车的回波信号到确定的拖车正面形状的测量距离的比较,对估计的拖车任意正面形状进行分类;以及基于至少一组uss数据估计结果生成与运动学模型的至少一个比较,以确保运动学模型对与所确定的拖车正面形状相关联的haa的结果被认为具有更高的信号性能,其中更高的信号性能基于低速下与运动学模型的相关性。
26.在至少一个示例性实施例中,车辆装置包括uss估计单元,其被配置成实现运动学模型,用于评估来自较低速度下的uss测量值的uss过程haa结果的质量,而uss过程haa结果被用于评估一组拖车动态条件下的运动学模型的质量,该一组拖车动态条件至少包括较高速度下、具有转向输入的较高速度下、作用在车辆和拖车上的阈值以上的粗糙路面条件以及作用在车辆和拖车上的阈值以上的侧风条件的动力学。
附图说明
27.下文将结合以下附图描述示例性实施例,其中相同的附图标记表示相同的元件,并且其中:
28.图1示出了根据示例性实施例的描绘示例性车辆的框图,该示例性车辆可以包括处理器,该处理器通过使用回波切换和用于距离建模、转向角一致性和拖车前部形状确定的似然性滤波器来检测任何任意形状拖车的后部超声波传感器(uss)回波来计算挂接装置铰接角(haa);
29.图2示出了根据示例性实施例的通过使用超声波传感器(uss)系统结合运动学模型来估计挂接装置铰接角(haa)来精确地估计任意形状拖车的haa的方法的示例图;
30.图3示出了根据示例性实施例的通过与使用超声波传感器(uss)系统的估计挂接装置铰接角(haa)进行比较的在融合之前运动学模型的质量评估的示例图;
31.图4示出了根据示例性实施例的示例图,该示例图提供了uss数据与运动学模型
和/或其他传感器的融合以及它们各自的质量评估,用于使用超声波传感器(uss)系统来估计挂接装置铰接角(haa);
32.图5示出了根据示例性实施例的车辆和拖车布置以及由超声波传感器(uss)通过使用超声波传感器(uss)系统的估计挂接装置铰接角(haa)检测的挂接装置铰接角(haa)的示例图;
33.图6示出了根据示例性实施例的由超声波传感器(uss)通过使用超声波传感器(uss)系统的估计挂接装置铰接角(haa)检测的挂接装置铰接角(haa)的几何角度的示例图;和
34.图7示出了根据示例性实施例的用于使用超声波传感器(uss)系统通过估计挂接装置铰接角(haa)的uss数据处理,然后通过似然性逻辑的过程的示例性流程图。
具体实施方式
35.以下详细描述本质上仅仅是示例性的,并不旨在限制应用和用途。此外,不打算受前面的技术领域、背景、概述或下面的详细描述中呈现的任何明示或暗示的理论的约束。
36.如本文所用,术语“模块”指任何硬件、软件、固件、电子控制组件、处理逻辑和/或处理器设备,单独地或以任何组合,包括但不限于:专用集成电路(asic)、现场可编程门阵列(fpga)、电子电路、处理器(共享的、专用的或成组的)和执行一个或多个软件或固件程序的存储器、组合逻辑电路和/或提供所述功能的其他合适组件。
37.这里可以根据功能和/或逻辑块组件和各种处理步骤来描述本公开的实施例。应当理解,这种块组件可以由被配置为执行指定功能的任何数量的硬件、软件和/或固件组件来实现。例如,本公开的实施例可以采用各种集成电路组件,例如存储元件、数字信号处理元件、逻辑元件、查找表等,其可以在一个或多个微处理器或其他控制设备的控制下执行各种功能。此外,本领域技术人员将理解,本公开的实施例可以结合任何数量的系统来实践,并且这里描述的系统仅仅是本公开的示例性实施例。
38.自主和半自主车辆能够感知其环境并基于感知到的环境进行导航。这种车辆使用多种类型的感测设备来感测它们的环境,例如光学相机、雷达、激光雷达、其他图像传感器等。在这种车辆中,感测的数据可以与地图数据和车辆传感器(惯性测量单元、车辆速度传感器等)融合在一起,以基于道路几何形状来识别和跟踪车辆轨迹跟踪性能,并且在本公开中适用于感测用于运动学建模的数据,以及用于估计挂接装置铰接角(haa),以在牵引不同形状的拖车时增强牵引稳定性。
39.在各种示例性实施例中,本公开描述了将“运动模型”与拖车相关联的系统、方法和装置。运动学模型描述了车辆和拖车的位置、取向和运动之间的关系。
40.在各种示例性实施例中,本公开描述了一些系统、方法和装置,用于使用超声波传感器(uss)和运动学模型来估计挂接装置铰接角(haa),与运动学模型和其他传感器数据进行比较,用于至少评估运动学模型的质量,然后与其他传感器数据和运动学模型融合,用于在牵引操作中的各种拖挂动态事件期间估计任意形状拖车前部的挂接装置铰接角(haa)。
41.在各种示例性实施例中,本公开描述了一些系统、方法和装置,以通过使用增强的传感器原始数据、似然性滤波、鲁棒的传感器对选择、在低动态拖挂事件期间基于与运动学模型的比较使用uss对haa进行质量度量评估、基于在拖挂高动态事件期间使用uss与haa进
行比较以评估运动学模型的质量的针对运动学模型的质量度量评估、以及然后使用质量度量(metric)将使用uss的估计haa与运动学模型(连同其他传感器模态)信号进行融合,使用用于任意形状拖车的uss来准确地估计haa。
42.在各种示例性实施例中,本公开描述了通过省略“不可信的(implausible)”数据点并通过配置拖车运动模型用以进一步增强uss测量的接受标准来改进原始uss数据滤波的系统、方法和装置。该方法包括评估传感器对的性能以选择“获胜”对和haa角质量,然后在动态机动过程中使用uss信号评估运动学模型质量以建立运动学建模的质量指标(indicator),然后进行融合。在各种示例性实施例中,本公开描述了一种使用超声波传感器(uss)估计挂接装置铰接角(haa)的方法,其中uss数据被处理,然后通过似然性逻辑以(1)从不期望的反射中检测真实的拖车回波,(2)检测拖车形状,以及(3)对哪些传感器对提供更好的信息进行初始评估,以便从它们的回波中计算haa。该方法包括计算原始haa的几何方程,其中来自传感器对的每个原始haa在低速下与运动学模型进行比较,并且选择具有更高性能(即与运动学模型更大的相关性)的对。
43.图1示出了描绘根据一实施例的示例性车辆的框图,该示例性车辆可以包括处理器,该处理器使用回波切换和用于直行驾驶、转向角度一致性和拖车正面形状确定的似然性滤波器,使用任何任意形状拖车的后方uss回波来计算haa。处理器可以使用均方误差阈值来实现,以便为任意拖车正面形状选择“获胜”的uss传感器对。处理器利用运动学模型和uss方法之间的低速比较,利用均方误差设计uss的质量指标,该均方误差具有基于接受阈值的足够数据点。处理器在运动学模型假设可能不成立的情况下(例如,拖车动态情况下的较高速度或粗糙路况)使用运动学模型和uss方法之间的比较来设计运动学模型的质量指标。处理器还使用业内已知的方法融合uss和运动学模型,例如卡尔曼滤波(以及其他传感器模态,即视觉、雷达、超宽带(uwb)
…
),使用haa计算值(即uss、视觉、雷达、超宽带
……
)和设计的质量指标。
44.如图1所示,车辆10通常包括底盘12、车身14、前轮16和后轮18。车身14布置在底盘12上,并且基本上封闭车辆10的部件。主体14和底盘12可以共同形成框架。车轮16-18每个都在车身14的相应拐角附近可旋转地联接到底盘12。在所示实施例中,车辆10被描绘为客车。然而,应当理解,也可以使用任何其他车辆,包括摩托车、卡车、运动型多功能车(suv)、休闲车(rv)、船舶、飞机等。
45.如图所示,车辆10通常包括推进系统20、传动系统22、转向系统24、制动系统26、传感器系统28、致动器系统30、至少一个数据存储设备32、至少一个控制器34和通信系统36。在该示例中,推进系统20可以包括电机,例如永磁(pm)电机。传动系统22被配置成根据可选择的速度比将动力从推进系统20传递到车轮16和18。
46.制动系统26被配置为向车轮16和18提供制动扭矩。在各种示例性实施例中,制动系统26可以包括摩擦制动器、线控制动器、诸如电机的再生制动系统和/或其他合适的制动系统。
47.转向系统24影响车轮16和/或18的位置。尽管为了说明的目的而被描绘为包括方向盘25,但是在本公开范围内设想的一些示例性实施例中,转向系统24可以不包括方向盘。
48.传感器系统28包括一个或多个感测设备40a-40v,其感测车辆10的外部环境和/或内部环境的可观察条件,并生成与之相关的传感器数据。传感器系统可以包括但不限于后
超声波传感器、后视觉传感器、后雷达传感器、车速传感器和惯性测量传感器。
49.致动器系统30包括一个或多个致动器设备42a-42n,其控制一个或多个车辆特征,例如但不限于推进系统20、传动系统22、转向系统24和制动系统26。在各种示例性实施例中,车辆10还可以包括图1中未示出的内部和/或外部车辆特征,例如各种门、后备箱和车厢特征,例如空气、音乐、照明、触摸屏显示组件等。
50.数据存储设备32存储用于控制车辆10的数据。数据存储设备32可以是控制器34的一部分,与控制器34分离,或者是控制器34的一部分和分离系统的一部分。
51.控制器34包括至少一个处理器44(与系统100集成或连接到系统100)和计算机可读存储设备或介质46。处理器44可以是任何定制的或商业上可获得的处理器、中央处理单元(cpu)、图形处理单元(gpu)、专用集成电路(asic)(例如,实现神经网络的定制asic)、现场可编程门阵列(fpga)、与控制器34相关联的几个处理器中的辅助处理器、基于半导体的微处理器(以微芯片或芯片组的形式)、它们的任何组合、或通常用于执行指令的任何设备。计算机可读存储设备或介质46可以包括例如只读存储器(rom)、随机存取存储器(ram)和保活存储器(kam)中的易失性和非易失性存储。kam是持久或非易失性存储器,用于在处理器44断电时存储各种操作变量。计算机可读存储设备或介质46可以使用几种已知存储设备中的任何一种来实现,例如prom(可编程只读存储器)、eprom(电可编程只读存储器)、eeprom(电可擦除可编程只读存储器)、闪存或能够存储数据的任何其他电、磁、光或组合存储设备,其中一些存储设备代表可执行指令,由控制器34在控制车辆10时使用。
52.指令可以包括一个或多个单独的程序,其中的每个程序包括用于实现逻辑功能的可执行指令的有序列表。当由处理器44执行时,指令接收和处理来自传感器系统28的信号(例如,传感器数据),执行用于自动控制车辆10的部件的逻辑、计算、方法和/或算法,并生成传输到致动器系统30的控制信号,以基于逻辑、计算、方法和/或算法自动控制车辆10的部件。尽管在图1中仅示出了一个控制器34,但是车辆10的实施例可以包括任意数量的控制器34,这些控制器34通过任意合适的通信介质或通信介质的组合进行通信,并且协作来处理传感器信号、执行逻辑、计算、方法和/或算法,并且生成控制信号以自动控制车辆10的特征。
53.例如,系统100可以包括嵌入控制器34中的任意数量的附加子模块,这些子模块可以被组合和/或进一步划分以类似地实现这里描述的系统和方法。另外,系统100的输入可以从传感器系统28接收,从与车辆10相关联的其他控制模块(未示出)接收,和/或由图1的控制器34内的其他子模块(未示出)确定/建模。此外,还可以对输入进行预处理,例如子采样、降噪、归一化、特征提取、缺失数据减少等。
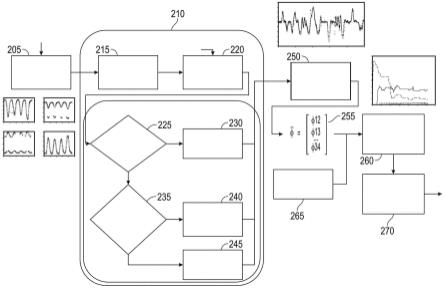
54.图2示出了根据示例性实施例的使用超声波传感器(uss)系统通过估计挂接装置铰接角(haa)精确估计任意形状拖车的haa的示例图。
55.图2包括通过用于滤波系统的系统100(图1)的处理,滤波系统包括一组超声波传感器原始回波测量数据(例如,i=1,2,3,4,表示可用的uss的数量),用于信号预处理和基于回波质量205的回波切换。预处理的集合回波信号或驾驶数据然后由一组似然性滤波器210处理,用于稳健的方向(例如,直行驾驶估计)和声学滤波。例如,使用直线行驶d
istraight
的行驶数据的一组似然性滤波器215,其部分用于建立测量距离的可接受范围的“基础”,并滤波掉不一致的时变测量数据。一旦直线行驶215的输出已知,似然性滤波器通
过结合方向盘角度(swa)或道路车轮角度(rwa)进一步改进测量点的接受标准。给定任何单个传感器i的已知直线行驶距离d
istraight
,swa输入的顺时针增加(框220)将导致传感器i和拖车正面之间的实际物理距离的相应增加或减少。不符合此对应关系的传感器数据将被删除。这一知识进一步限制了真正来自拖车表面的反射的接受范围,并允许滤波掉不需要的反射,例如来自挂接点的反射。
56.基于不同传感器的直线行驶数据d
istraight
之间的差异,对拖车前部的形状进行初始评估。在225处,通过比较一组直行驾驶数据di的值是否小于阈值来确定拖车形状的似然性。如果是,则在230处使用一组平面几何方程来估计挂接装置铰接角(haa)。如果不是,则在235处执行另一个确定,该确定是要确定一组直行驾驶数据di的车辆同一侧的传感器数据是否大于阈值(对于4个对称放置的超声波传感器的情况)。如果结果是肯定的,则在240处使用一组不规则拖车形状的几何方程来估计挂接装置铰接角(haa)。如果不是,则假设拖车是v-nose形状的拖车,并且在245处,一组v-nose几何方程被用于拖车形状的似然性。
57.一旦拖车形状被确定并且不需要的uss数据点被滤波掉,所确定的一组几何方程250被用于通过比较传感器i和j的报告距离d
ifiltered
滤波和d
jstraight
(直线来计算挂接装置铰接角(haa)φ
i,j
。
58.一旦拖车形状被确定并且不需要的uss数据点被滤波掉,所确定的几何方程组250被用于通过比较传感器i和j的报告距离d
ifiltered
和d
jstraight
来计算挂接装置铰接角(haa)φ
i,j
。几何方程要求了解uss传感器在车辆上相对于挂接点的位置。
59.取决于所确定的该一组几何方程和可接受的uss距离测量值d
ifiltered
的可用性,在任何时间tk,在255处最多可以获得6个计算的haa(对于4个超声波传感器的情况),如由矢量所示的。
60.在265处,该处理通过将传感器估计结果与独立计算的低速运动模型φ
kin
进行比较,使用uss数据来优化该组结果。运动学模型φ
kin
被实现为背景应用,并且发现的误差项被定义为已经收集的运动学模型φ
kin
和uss方程之间的差异。在260处,基于与运动学模型φ
kin
的一致性,处理由每个传感器对输出φ
i,j
(或几何方程)提供的估计质量,以便识别在其haa估计中表现更好的传感器对。已知在当拖车物理上更靠近这些传感器时的情况下期间,车辆一侧的传感器在提供haa估计方面可能表现得更好,可以定义估计的φ
i,j
相对于φ
kin
的不同性能带。作为一示例,对于通过比较车辆右侧的传感器计算出的φ
i,j
,在[-20
°
,-10
°
之间]的haa的性能带可以显示出更好的估计性能,而相同的传感器在相反的[+10
°
,+20
°
]的带(band)中可能具有降低的性能。在每个不同的性能带的φ
kin
和φ
i,j
之间的均方误差(mse)可以指示该带中的“获胜”对。
[0061]
一旦在低速条件下选择了获胜对,在任何时间tk和任何性能频带的可用获胜对估计的平均值通过uss过程260输出作为haa估计φ
uss
。获胜对选择导致比在时间tk简单地平均中所有可用φ
i,j
更精细的haa估计输出。一旦识别不同估计带中的获胜对的过程完成,
然后在270处处理haa估计输出以生成“整体”uss过程性能和质量度量。
[0062]
图3示出了根据示例性实施例的利用超声波传感器(uss)系统通过估计挂接装置铰接角(haa)进行融合之前的运动学模型的定量精度评估的示例性示意图。在图3中,用于执行运动学模型φ
kin
的质量评估的输入305可以包括多种类型的uss雷达的传感器输入,以及相机信号输入,用于由摇摆、侧滑、粗糙道路输入或风输入检测模块310的计算。传感器输入的移动平均值315是根据运动学模型φ
kin
325的估计值独立计算的。计算haa的这两种独立模态(modality)的偏差320允许检测运动学模型失效的情况,包括侧滑、摇摆、粗糙道路和超过拖车可接受阈值的风效应。如果对侧滑、摇摆、粗糙道路和风效应的检测被确定为高于可接受的阈值,则运动学模型(1,0)的质量评估330被确定为
[0063]
在示例性实施例中,如果确定的速度高于基于拖车摇摆检测标准的拖车摇摆的可接受阈值,则进行以下评估:使用超声波传感器(uss)值的估计挂接装置铰接角(haa)使用(即,指数移动平均或用于拖车摇摆的感兴趣频率范围即0.5到4hz的带通滤波器)来自uss(和/或其他传感器模态,如视觉、雷达、uwb
…
)的haa信号到运动学模型来评估。如果运动学模型和(即,uss)传感器值之间的差异大于可接受的阈值,则摇摆诱发效应的可能性很大,并且在330处的运动学模型质量评估被设置为0。
[0064]
在另一个示例性实施例中,如果速度和转向输入高于基于拖车侧滑检测标准的拖车侧滑检测的可接受阈值,则进行以下评估:使用(即,指数移动平均)来自uss(和/或其他传感器模态,如视觉、雷达、uwb
…
)的haa信号到运动学模型来评估滤波器传感器。如果运动学模型和(即,uss)传感器值之间的差异大于阈值,则侧滑效应的可能性很大,并且在330处的运动学模型质量评估的结果被设置为0。
[0065]
在另一个示例性实施例中,如果粗糙道路车轮速度传感器算法基于粗糙道路检测标准生成高于粗糙道路检测的可接受阈值的结果,则进行以下评估:针对来自uss(和/或其他传感器模态,如视觉、雷达、uwb
…
)的haa信号和运动学模型之间的误差的统计度量(即标准偏差)来评估滤波器传感器。如果统计度量大于可接受的阈值,则粗糙道路输入影响的可能性很大,并且330处的运动学模型质量评估的结果被设置为0。
[0066]
在另一个示例性实施例中,如果速度高于阈值并且侧风被检测到高于可接受的阈值,则进行以下评估:使用(即,指数移动平均)来自uss(和/或其他传感器模态,如视觉、雷达、uwb
…
)的haa信号到运动学模型来评估滤波器传感器。如果运动模型和(即,uss)传感器值之间的差异大于可接受的阈值,则风输入效应的可能性很大,并且在330处的运动模型质量评估的结果被设置为0。
[0067]
在2020年6月9日公布的题为“vehicle suspension system alignment monitoring”的美国专利号10,679,436中描述了用于检测车辆中环境侧风状况的技术示例。
[0068]
图4示出了根据示例性实施例的通过使用超声波传感器(uss)系统估计挂接装置铰接角(haa)来提供uss数据与运动学模型和/或其他传感器的融合的示例性示意图。在图4中,在一示例性实施例中,运动学模型被实现,在第一种情况下评估来自较低速度的uss的haa的质量,在第二种情况下,尽管来自uss的关于haa的感测数据被用于评估动态条件下的
运动学模型的质量。根据图3中描述的一组可接受的阈值,基于单独的操作条件或逻辑上分开的一组条件来评估运动模型质量。
[0069]
如图4所示,来自uss的haa(连同其它传感器模态,如uss 415视觉(相机)425雷达435uwb(未示出),
…
)和相关的质量指标与运动学模型融合。例如,在图4中,示出了一组多路复用的输入,包括基于运动学模型的haa和质量指标410基于uss的haa和质量指标420基于视觉的haa和质量指标430、基于雷达的haa和质量指标440以及使用各种技术(例如卡尔曼滤波、贝叶斯滤波、深度学习(即cnn、rnn等)、机器学习等)组合或融合的基于haa和质量指标450的附加传感器模态,用于haa信号的融合460处的融合传感器处理。
[0070]
基于运动学模型的质量,在两个相关的操作情况下执行haa信号的融合460。在第一种情况下,如果(或当)运动学模型被认为是低质量的,则来自uss的haa可以与其他传感器模态(如视觉、雷达、uwb
…
,如果可用的话)以及相关的质量指标融合。在这种情况下,融合信号可以简单地报告为移动平均(movingaverage)。在补充的第二种情况下,融合460在这里基于高质量的运动学模型发生:如果运动学模型被认为是高质量的,则运动学模型可以与来自uss的haa和其他传感器模态(如视觉、雷达、uwb
…
,如果可用的话)以及相关的质量指标融合。
[0071]
图5示出了根据示例性实施例的通过使用超声波传感器(uss)系统的估计挂接装置铰接角(haa)由超声波传感器(uss)检测的挂接装置铰接角(haa)的示例图。基于车辆轴距的距离lw515、车辆的后轮轴和挂接点之间的距离l
h 520、挂接点和拖车的后轮轴之间的距离l
tr
525以及车辆的车轮角度的角度δ535的一组测量值来计算车辆拖车500中检测到的haa510“φ”。计算510“φ”的公式如下:
[0072][0073]
其中v
c 530是车辆的纵向速度,δ535是根据车辆驾驶员的转向角输入确定的车轮角,并且拖车的运动学模型通过测量车辆-拖车500随时间t的lw,l
tr
,lh来导出,用于计算haa(即,510“φ”)。
[0074]
图6示出了根据一示例性实施例的v-nose拖车的几何角度的示例性示意图,该拖车具有由使用超声波传感器(uss)系统(haa系统)的估计挂接装置铰接角(haa)确定的正面角度。
[0075]
如图6所示,几何方程的示例提供如下:
[0076][0077]
其中d1是传感器1测量的距离,d4是传感器4测量的距离,l
hitch
是车辆保险杠到挂接点之间的距离,l1是车辆保险杠中点到传感器1之间的距离,l4是车辆保险杠中点到传感器4之间的距离,α是拖车前部的正面角度。对这个方程进行数值求解,以获得未知haa的值,用φ表示。
[0078]
图7示出了根据示例性实施例的使用超声波传感器(uss)系统(haa系统)通过估计
挂接装置铰接角(haa)进行uss数据处理然后通过似然性逻辑的过程的示例性流程图。
[0079]
最初,处理uss数据,然后通过似然性逻辑,从不希望的反射中检测真实的拖车回波,并检测拖车形状,对传感器对几何方程进行初始评估,并计算原始haa。来自传感器对的每个原始haa在低速期间与运动学模型进行比较,并且选择那些具有更高性能的那些对。
[0080]
在任务705处,响应于拖车与车辆的联接(或联接状态,或其他类似动作),执行或触发该系统,该系统用于使用超声波传感器(uss)来估计挂接装置铰接角(haa),同时使用似然性滤波来确保检测到的回波信号性能的质量。
[0081]
在任务710处,一组超声波传感器(uss)生成回波信号,该回波信号基于已经指向拖车的回波信号的检测向haa系统提供uss数据。uss数据经过处理,然后通过似然性逻辑滤波噪声,并使用直行期间收集的数据从不希望的反射中识别真实的拖车回声,并通过结合方向盘角度(swa)进一步增强滤波噪声。
[0082]
在任务715处,似然性滤波器使用直线行驶期间收集的数据对任意拖车前端形状的拖车前端形状进行分类。似然性滤波器逻辑将直行驾驶真实回波信号相互比较,并确定拖车的形状分类。
[0083]
在任务720处,基于来自任务715的对于任意拖车前端形状的拖车的形状分类,使用直线行驶期间收集的数据,似然性滤波器对要选择哪些传感器对组合和相应的几何方程进行初始评估,以便计算haa。
[0084]
在任务725处,来自每个传感器对的原始haa组与低速下的运动学模型进行比较。这是为了确保已被选择的传感器对是展示更高性能的质量的传感器对。该比较基于来自每个所选择的传感器对的一组uss数据估计结果φ
i,j
,,与低速下的运动学模型φ
kin
进行比较。φ
kin
和φ
i,j
之间的均方误差(mse)用于基于φ
kin
和φ
i,j
之间的比较来选择“获胜”对。
[0085]
在任务730处,通过组合来自“获胜”对的结果来确定uss数据使用被进一步优化。来自获胜对的结果的组合可以通过包括算术平均的多种方法来确定。然后,将该估计的挂接装置铰接角与运动学模型φ
kin
在较低速度下的估计结果进行比较,以提供用于uss haa计算的实施过程的质量度量,该过程具有相关联的确定的拖车形状。运动学模型和uss过程之间的低速比较,以确定uss的质量指标,可以使用多种不同类型的算法来识别质量。例如,可以使用基于可接受阈值的具有足够数据的均方误差计算。
[0086]
在任务735处,在基于拖车动力学(例如车辆拖车速度高于某个阈值或车辆速度和转向输入高于某个阈值)被视为无效的假设推导出运动学模型的情况下,进行运动学模型与uss过程之间的比较,以确定运动学模型的质量指标。当比较超过阈值时,可能存在拖车摇摆或拖车侧滑情况,并且运动学模型的质量指标被评估为低质量并被给定0值。
[0087]
在任务740处,在运动学模型是基于假设被认为无效下导出的情况下,至少基于粗糙(rough)道路动力学或侧风条件,在运动学模型和uss过程之间进行比较,以确定运动学模型的质量指标。当该比较超过阈值时,可能存在由于侧风或粗糙道路引起的拖车运动,并且运动学模型的质量指标被评估为低质量并且给定值为0。
[0088]
在任务750处,当运动学模型被认为是高质量时,来自uss数据的haa结果的融合可以在多个传感器模态和运动学模型下发生。haa结果由uss数据、多传感器模态数据和运动学模型以及相关质量指标的融合确定。多传感器模态可以包括视觉、雷达和uwb模态。
[0089]
在任务755处,来自uss数据的haa结果的融合可以在多个传感器模态下而不是基
于被认为低质量的运动学模型的运动学模型下发生。这里,同样,haa结果由uss数据、多传感器模态数据和相关质量指标的融合来确定。多传感器模态可以包括视觉、雷达和uwb模态。
[0090]
在任务760处,提供基于融合的haa角的最终输出。
[0091]
如简要提到的,上述各种模块和系统可以在haa系统中实现,用于使用一个或多个机器学习模型的估计步骤、运动学建模和似然性处理,所述机器学习模型经历有监督、无监督、半监督或强化学习。这样的模型可以被训练来执行分类(例如,二进制或多类分类)、回归、聚类、降维和/或这样的任务。这种模型的示例包括但不限于人工神经网络(ann)(例如递归神经网络(rnn)和卷积神经网络(cnn))、决策树模型(例如分类和回归树(cart))、集成学习模型(例如boosting、bootstrapped aggregation、梯度boosting机器和随机森林)、贝叶斯网络模型(例如朴素贝叶斯)、主成分分析(pca)、支持向量机(svm)、聚类模型(例如k近邻(k-nearest-neighbor)、k均值(k-means)、期望最大化、层次聚类等)和线性判别分析模型。
[0092]
应当理解,图1-7的过程可以包括任何数量的附加或替代任务,图1-7中所示的任务不需要以图示的顺序执行,并且图1-7的过程可以被结合到具有这里没有详细描述的附加功能的更全面的程序或过程中。此外,图1-7中示出的一个或多个任务可以从图1-7中示出的过程的实施例中省略,只要预期的整体功能保持完整。
[0093]
前面的详细描述本质上仅仅是说明性的,并不旨在限制主题的实施例或这些实施例的应用和使用。如这里所使用的,词语“示例性的”意味着“用作示例、实例或说明”这里描述为示例性的任何实现不一定被解释为比其他实现更优选或更有利。此外,不打算受前面的技术领域、背景或详细描述中呈现的任何明示或暗示的理论的约束。
[0094]
虽然在前面的详细描述中已经给出了至少一个示例性实施例,但是应当理解,存在大量的变化。还应当理解,一个或多个示例性实施例仅仅是示例,并不旨在以任何方式限制本公开的范围、适用性或配置。相反,前述详细描述将为本领域技术人员提供用于实现一个或多个示例性实施例的便利路线图。
[0095]
应当理解,在不脱离本技术及其法律等同物中阐述的本公开的范围的情况下,可以对元件的功能和布置进行各种改变。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1