一种交通信号机撞击倾斜检测设备及检测方法与流程
1.本发明涉及智能交通技术领域,特别涉及一种交通信号机撞击倾斜检测设备及检测方法。
背景技术:
2.交通信号机是现代城市交通系统的重要组成之一,主要用于城市道路交通信号的控制与管理。当前信号机缺乏撞击和倾斜检测,一旦发生撞击或倾斜事件,若不及时处理,会给路口车辆和行人带来安全隐患。对路口的设备有2次损坏的安全隐患。
技术实现要素:
3.本发明的目的在于克服上述背景技术中的不足,可以及时准确的检测交通信号机的撞击倾斜检测并上传给后台或相关人员进行及时处理,避免给路口的交通带来影响。
4.为实现以上目的,本发明提出了一种交通信号机撞击倾斜检测设备,包括主控芯片、空间运动传感器、存储芯片、交通信号机主控模块和摄像头,存储芯片存储有设备信息和空间传感器的初始状态和校准信息及检测各个方向的角度阈值加速度阈值;空间运动传感器安装在交通信号机上,主控芯片的四路串行通信接口uart与空间运动传感器连接,主控芯片的一路spi接口连接存储芯片,主控芯片的一路can接口经can总线和交通信号机主控模块连接,交通信号机主控模块与摄像头连接。
5.进一步地,所述主控芯片的一路串行通信接口uart与4g模块连接,4g模块与客户端连接。
6.进一步地,所述交通信号机主控模块连接有管理平台,所述4g模块与管理平台连接。
7.进一步地,所述主控芯片经io串口连接有led显示器、拨码开关和按键。
8.进一步地,所述主控芯片连接有电源模块。
9.进一步地,所述空间传感器安装在所述交通信号机的四角。
10.一种交通信号机撞击倾斜检测方法,包括:
11.获取实际角度和实际加速度,所述实际角度和实际加速度是利用空间运动传感器在交通信号机各个方向所获取的;
12.当所述实际角度超过预设的角度阈值时,则判定交通信号机发生倾斜,将倾斜信号发送到信号机主控模块上,以通过摄像头进行撞击的图片抓拍;
13.当所述实际加速度超过预设的加速度阈值时,则判定交通信号机发生撞击,将倾斜信号发送到信号机主控模块上,以通过摄像头进行撞击的图片抓拍。
14.进一步地,空间运动传感器每设定时间更新一次检测数据,将所述检测数据转化为实际角度和实际加速度;
15.角度换算公式如下:
16.xangle=((float)mpu6050angle.xangle/32768*180)
17.yangle=((float)mpu6050angle.yangle/32768*180)
18.zangle=((float)mpu6050angle.zangle/32768*180)
19.加速度换算公式如下:
20.x=((short)mpu6050acc.xacc/32768.0*16)
21.y=((short)mpu6050acc.yacc/32768.0*16)
22.z=((short)mpu6050acc.zacc/32768.0*16)
23.g=((float)sqrt(x*x+y*y+z*z));
24.其中,xangle表示x方向的实际角度,yangle表示y方向的实际角度,zangle表示z方向的实际角度,float表示浮点数,也就是带小数的数字,mpu6050angle.xangle表示从空间运动传感器中读出的x方向角度数值,mpu6050angle.yangle表示从空间运动传感器中读出的y方向角度数值,mpu6050angle.zangle表示从空间运动传感器中读出的z方向角度数值,mpu6050acc.xacc表示空间运动传感器中读出的x方向的加速度值,mpu6050acc.yacc空间运动传感器中读出的y方向的加速度值,pu6050acc.zacc表示空间运动传感器中读出的z方向的加速度值,sqrt表示平方根,g表示总体角速度。
25.进一步地,对交通信号机的倾斜判定如下:
26.收集最新多个设定时间段所更新的实际角度作为一组;
27.三个角度中任一组存在3/4及以上的实际角度超过预设的角度阈值时,则判定交通信号机发生倾斜。
28.进一步地,对交通信号机的撞击判定如下:
29.收集最新多个设定时间段所更新的实际加速度作为一组;
30.同一组中总体加速度存在70%及以上的实际加速度超过预设的加速度阈值时,则判定交通信号机发生撞击。
31.与现有技术相比,本发明存在以下技术效果:可以及时准确的检测交通信号机的撞击倾斜检测并上传给后台或相关人员进行及时处理,避免二次撞击以及给路口的交通带来影响,并通过安装在下信号机上的摄像头进行抓拍,为交通执法者提供违法证据。
附图说明
32.下面结合附图,对本发明的具体实施方式进行详细描述:
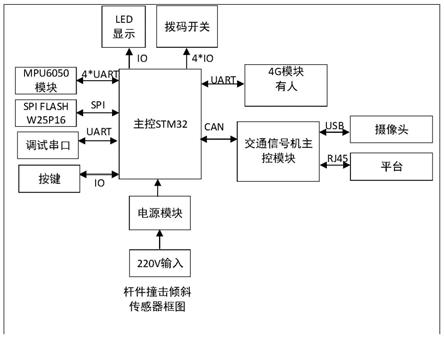
33.图1是撞击倾斜检测设备中各个模块的连接框图;
34.图2为撞击倾斜检测流程图;
35.图3为主控芯片的数据处理流程图。
具体实施方式
36.为了更进一步说明本发明的特征,请参阅以下有关本发明的详细说明与附图。所附图仅供参考与说明之用,并非用来对本发明的保护范围加以限制。
37.如图1至3所示,本实施例公开了一种交通信号机撞击倾斜检测设备,包括:主控芯片、空间运动传感器、存储芯片、交通信号机主控模块和摄像头,存储芯片存储有设备信息和空间传感器的初始状态和校准信息及检测各个方向的角度阈值加速度阈值;空间运动传感器安装在交通信号机上,主控芯片的四路串行通信接口与空间运动传感器连接,主控芯
片的一路spi接口连接存储芯片,主控芯片的一路can接口经can总线和交通信号机主控模块连接,交通信号机主控模块与摄像头连接。
38.空间运动传感器可以采用mpu6050模块,最大可支持4路,将mpu6050模块安装在交通信号机的四角,主要是获取交通信号机的x\y\z的实际角度和实际加速度;主控芯片采用stm32系列产品,作为检测设备的整体控制,4g模块可以采用有人厂家,具体型号是wh-lte-7s4。
39.主控stm32有6路串口通信,四路uart与mpu6050连接,一路串行通信接口uart连接调试串口以实时打印工作状态,一路串行通信接口uart连接4g模块,以发送数据到管理平台或短信发送到相关人员手机上,一路spi接spi flash存储芯片,一路can接口和交通信号机主控模块进行实时通讯,有撞击或倾斜事件及时发送给交通信号机主控模块,交通信号机主控模块可通过摄像头进行撞击的图片抓拍并上传至管理后台,防止有人撞到交通信号机后逃逸,给交通执法者提供违法凭证。
40.主控芯片经io串口连接有led显示器、拨码开关和按键,主控芯片连接有电源模块。led显示器是显示撞击检测器的工作状态,拨码开关可以用于检测角度阀值和加速度阈值,使检测更加准确;按键是用于mpu6050模块的初始状态获取,并将初始状态发送到主控芯片上,电源模块是把市电转换成本系统需要工作的电压。
41.对于预设的度阈值加速度阈值,根据交通信号机机箱的厚度和信号机的安装方式可设置不同的检测阈值,没有设置时程序的默认设置是角度的阈值为3度,加速度阈值为0.3g。
42.因而一旦发生撞击或倾斜会及时检测并上传给后台或相关人员进行及时处理,避免给路口的交通带来影响,并通过安装在下信号机上的摄像头进行抓拍,为交通执法者提供违法证据。
43.一种交通信号机撞击倾斜检测方法,包括如下步骤:
44.s1:主控芯片获取实际角度和实际加速度,所述实际角度和实际加速度是利用空间运动传感器在交通信号机各个方向所获取的;
45.空间运动传感器每设定时间更新一次检测数据,将所述检测数据转化为实际角度和实际加速度;设定时间可以设置为10ms。
46.角度换算公式如下:
47.xangle=((float)mpu6050angle.xangle/32768*180)
48.yangle=((float)mpu6050angle.yangle/32768*180)
49.zangle=((float)mpu6050angle.zangle/32768*180)
50.加速度换算公式如下:
51.x=((short)mpu6050acc.xacc/32768.0*16)
52.y=((short)mpu6050acc.yacc/32768.0*16)
53.z=((short)mpu6050acc.zacc/32768.0*16)
54.g=((float)sqrt(x*x+y*y+z*z));
55.其中,xangle表示x方向的实际角度,yangle表示y方向的实际角度,zangle表示z方向的实际角度,float表示浮点数,mpu6050angle.xangle表示从空间运动传感器中读出的x方向角度数值,mpu6050angle.yangle表示从空间运动传感器中读出的y方向角度数值,
mpu6050angle.zangle表示从空间运动传感器中读出的z方向角度数值,mpu6050acc.xacc表示空间运动传感器中读出的x方向的加速度值,mpu6050acc.yacc空间运动传感器中读出的y方向的加速度值,pu6050acc.zacc表示空间运动传感器中读出的z方向的加速度值,sqrt表示平方根,g表示总体角速度。
56.s2:主控芯片对实际角度和预设的角度阈值进行比较,当所述实际角度超过预设的角度阈值时,则判定交通信号机发生倾斜,将倾斜信号发送到信号机主控模块上,以通过摄像头进行撞击的图片抓拍;
57.对交通信号机的倾斜判定如下:
58.将设定时间设定为10ms,收集最新200ms内所更新的实际角度作为一组,即有20个数据;
59.三个角度中任一组存在3/4及以上(20个数据中有15个或超过15个)的实际角度超过预设的角度阈值时,则判定交通信号机发生倾斜。
60.s3:主控芯片对实际加速度和预设的加速度阈值进行比较,当所述实际加速度超过预设的加速度阈值时,则判定交通信号机发生撞击,将倾斜信号发送到信号机主控模块上,以通过摄像头进行撞击的图片抓拍。
61.对交通信号机的撞击判定如下:
62.将设定时间设定为10ms,收集最新100ms内所更新的实际加速度作为一组,即有10个数据;
63.同一组中总体加速度存在70%及以上(10个数据中有7个或7个以上)的实际加速度超过预设的加速度阈值时,则判定交通信号机发生撞击
64.工作原理:空间运动传感器mpu6050模块安装在交通信号机的四角,安装好后,通过软件进行配置空间运动传感器的倾斜角度阀值与加速度阀值。按下按键进行空间运动传感器的初始状态获取。当有倾斜或撞击事件后,信号机的角度或加速度都会瞬间发生变化,主控stm32检测实际角度变化超过角度阈值就时,判定交通信号机发生倾斜,实际加速度变化超过加速度阀值时,判定交通信号机发生撞击,通过4g模块发送到管理平台或发短信到相关人员的手机中,通过led显示器进行故障显示。通过can总线发送给交通信号机主控模块,交通信号机主控模块收到撞击或倾斜事件后通过摄像头进行各个方向的抓拍,通过网络发送给管理平台。
65.本发明实施例提供的系统是用于执行上述各方法实施例的,具体流程和详细内容请参照上述实施例,此处不再赘述。
66.需要说明的是,本文中“第一”和“第二”仅仅用来区分名称相同的实体或操作,并不暗示这些实体或操作之间顺序或关系。
67.以上所述仅为本发明的较佳实施例,并不用以限制本发明,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1