无线式振动探头的制作方法
1.本发明涉及旋转机器设备的故障诊断技术,更为具体而言,涉及一种在对诸如起重机减速器之类的旋转机械进行故障诊断中使用的无线式振动探头。
背景技术:
2.起重机械在人们的生产活动中扮演重要角色,其安全性受到广泛关注,被国家列为法定检验对象。减速器是起重机械的重要零部件,工作频繁,承受载荷大,负载变化多样,加上一些不规范的操作(如打反车制停等),导致故障时有发生,需要经常性的对其检查,保证安全运行。通常,主要检查减速器的齿轮、轴承和箱体三部分。其中,箱体可以经外观检查判断其是否失效;而对于齿轮、轴承则需要打开减速器机盖进行细致检查。然而。减速器盖的拆装一般需要使用吊装工具,操作不便,费时费力,并存在一定的危险性,这些因素都增加了对减速器状态检测的不便性,使得一些潜在问题难以及时发现和排除,易形成减速器的安全隐患。
3.目前,针对旋转机械的故障诊断系统为分立式拓扑结构,系统包含多路传感器、调理器、低噪声电缆、数据采集器、分析仪,通过阶次谱判断旋转机械的状态。使用该系统对起重机减速器运行状态进行监测,存在如下不足。
4.1)系统组成较为复杂,不利于在起重机工作现场快速搭建;
5.2)传感器外壳为模拟地,多路传感器电气连接容易产生地回路,进而造成信号干扰;
6.3)系统为分立式拓扑结构,在操作现场不易安装,无法实现对起重机减速器状态的长时间动态监测。
技术实现要素:
7.本发明提供了一种无线式振动探头,其在使用时易于安装,能够通过无线传输获得转速信号,振动探头可独立工作,因此避免了并且避免了现有多路传感器的信号干扰的问题,改善了测试准确度。
8.根据本发明的实施方式,本发明提供的一种无线式振动探头用于对旋转机械(例如,起重机减速器)进行故障诊断,其包括:
9.基座,其适于安装在所述旋转机械上;
10.主体,其内部设置有电子装置;
11.传感器,其连接在所述基座与主体之间,用于监测所述旋转机械的振动并产生振动时域信号,并通过信号传输线将所述振动时域信号传输给所述电子装置;
12.其中,所述电子装置无线接收所述旋转机械的转速信号,结合该转速信号对所述振动时域信号进行处理并输出阶次谱信息,该阶次谱信息用于故障诊断。
13.根据该实施方式,将故障诊断的包含采集与分析电路的处理模块集成入探头内部,能独立完成单测点故障诊断功能。并且,这种无线式单探头结构,在测试现场可以快速
安装使用,无需多路传感器电气连接,避免了地回路的产生,进而避免因地回路造成的信号干扰。在所述电子装置中,调理模块集成在振动探头的前端,传输距离很短,采集和分析电路采用soc系统结构,数字电路集成度高,因此可以有效避免因模拟模块、数字模块间串扰,而造成可靠性不高的问题。
14.在一些实施方式,所述传感器具有第一端和第二端,所述第一端与所述基座刚性连接,所述第二端嵌套在所述主体的外壳内,所述信号传输线从所述传感器的第二端引出并连接至所述主体的电子装置。可选地,所述传感器的第一端通过螺栓与所述基座刚性连接;和/或,所述传感器的第二端通过橡胶套卡合在所述主体的外壳上相应的开口内。可选的,所述基座包括磁力座,和/或,所述传感器包括加速度计。
15.在一些实施方式中,所述电子装置包括:
16.电池,
17.电路模块,与所述电池电连接,所述电路模块包括调理模块、处理模块和无线收发模块;
18.其中,所述调理模块对所述振动时域信号的幅值和频带进行调整,所述处理模块通过所述无线收发模块所述旋转机械的转速信号,并结合所述转速信号对经所述调理模块调整后的振动时域信号进行处理,得到所述阶次谱信息。
19.根据该实施方式,采用大容量电池,可以对监测对象进行长时间动态监测。可以通过定时休眠、自动唤醒的方式,进一步延长监测时间。并且,通过无线方式进行通信,振动探头可独立工作,进一步简化了设备,易于安装,同时也避免了地回路的产生。
20.在一些实施方式中,所述主体的外壳的内壁设置有导轨,所述电子装置安装在活动支架上,所述活动支架安装在所述导轨上并能够沿所述主体的轴向滑动,在所述电子装置的沿轴向的两端分别设有弹簧,所述弹簧抵接在所述电子装置的端部与所述外壳的内壁之间。
21.根据该实施方式,探头内部通过上述弹簧阻尼结构调整系统的谐振频率范围,可有效减小对象设备表面振动对探头内部电路器件的影响。
22.在一些实施方式中,所述电子装置对所述振动时域信号进行处理包括:
23.所述处理模块通过无线收发模块实时接收所述旋转机械的转速信号,结合所述转速信号对所述振动时域信号进行重采样,得到等角域信号;
24.所述处理模块对所述等角域信号进行傅里叶变换得到初始阶次谱;
25.所述处理模块根据所述转速信号的跟踪频率,提取预先存储的传递函数,以得到阶次谱修正系数;
26.所述处理模块采用所述阶次谱修正系数对初始阶次谱进行修正得到最终阶次谱。可选地,所述处理模块通过所述无线收发模块向外部设备发送所述最终阶次谱。
27.根据该实施方式,通过无线校时和无线传输,探头实现振动时域信号与角域转速信号的同步,并完成等时基采样向等角域采样的转换。
28.在一些实施方式中,所述传递函数通过以下方式确定并预先存储在存储器中:
29.在未组装所述主体的情况下,将所述传感器和基座安装于所述旋转机械,测得在所述旋转机械处于正常工作的状态下的第一振动时域信号及其对应的第一频谱;
30.将所述主体、传感器和基座组装在一起的情况下,测得在所述旋转机械处于正常
工作的状态下的第二振动时域信号及其对应的第二频谱;
31.根据所述第一振动时域信号及其对应的第一频谱、所述第二振动时域信号及其对应的第二频谱计算得到传递函数;
32.将所述传递函数保存在存储器中。
33.根据该实施方式,探头为可拆解结构,内部电路模块具有频响修正算法功能,可消除探头结构质量对重机减速器表面测点动力学模型的影响。
34.在一些实施方式中,所述处理模块还执行下述操作:
35.将所述最终阶次谱进行统计、归类并存入数据库;
36.计算入库的阶次谱的平均曲线,并设定阈值;
37.将当前测试得到的阶次谱与所述阈值进行比较,若超出所述阈值,则发出表示所述旋转机械振动异常或有潜在故障的指示。
38.根据该实施方式,可以通过对振动阶次谱趋势项进行分析,判断异常状态。
39.由上述可知,本发明提出的无线式振动探头,适于对起重机减速器等旋转机械进行故障诊断,安装在对象设备表面,其内部独立供电,通过无线通讯实时接收减速器转速信号,与转速同步后将等时基采样的振动加速度信号转换为变时基等角域信号,经傅里叶变换获得减速器表面加速度的阶次谱信息。振动探头可长期独立工作,定时完成起重机减速器工作状态的监测工作,创建并积累对应起重机减速器典型测点位置处的振动阶次谱库。通过阶次谱相似度判断可发现减速器内部潜在故障,振动信号异常时能及时对故障进行判断和报警。
40.本发明实施方式的各个方面、特征、优点等将在下文结合附图进行具体描述。根据以下结合附图的具体描述,本发明的上述方面、特征、优点等将会变得更加清楚。
附图说明
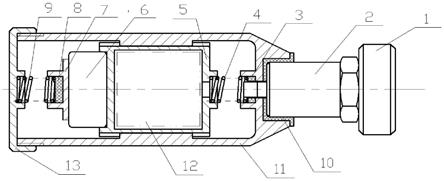
41.图1是示出本发明示例性实施方式的无线式振动探头的结构的示意图。
42.图2是示出本发明示例性实施方式的无线式振动探头的处理的流程示意图。
具体实施方式
43.为了便于理解本发明技术方案的各个方面、特征以及优点,下面结合附图对本发明进行具体描述。应当理解,下述的各种实施方式只用于举例说明,而非用于限制本发明的保护范围。
44.图1示出了本发明的无线式振动探头的一个示例性实施方式。如图1所示,所述振动探头包括:磁力座(即基座的一例)1、加速度计(即传感器的一例)2、以及主体,所述主体包括由壳体11和端盖13构成的外壳和设置在外壳内部的电子装置。其中,磁力座1适于安装在旋转机械(例如,起重机减速器)上,例如,通过磁力吸附在该旋转机械的外壳表面上。加速度计2连接在所述磁力座1与主体的壳体11之间,用于监测所述旋转机械的振动并产生振动时域信号,并通过信号传输线将所述振动时域信号传输给所述电子装置,所述电子装置通过无线传输接收旋转机械的转速信号并对所述振动时域信号进行处理并输出阶次谱信息,该阶次谱信息用于故障诊断。在一些实施方式中,所述无线式振动探头为数字式振动探头。
45.如图1所示,加速度计2具有第一端和第二端,所述第一端通过螺栓与所述磁力座1刚性连接,所述第二端嵌套在所述主体的壳体11内,例如,通过橡胶套10卡合在壳体11上相应的开口内。其中,所述信号传输线从所述加速度计的第二端引出并连接至所述主体的电子装置。
46.所述电子装置包括电池6和电路模块12。所述主体的壳体14的内壁设有导轨,活动支架5与所述导轨接合,并能沿所述导轨在主体的轴向上滑动。所述电子装置安装在活动支架5上,其中,电池6、电路模块12与活动支架5刚性连接,成为主体内部的电子装置总成结构。所述电池6经由电池压板7按压在活动支架上。在电子装置总成结构的沿轴向的两端分别设有弹簧4、9。具体而言,在活动支架5的朝向加速度计2一侧的端部与壳体11的内壁之间设有弹簧4,在所述活动支架5的该端部设有容纳弹簧4的一端的开口,在壳体11的内壁设有容纳弹簧4的另一端的开口并且该开口内设有橡胶套3,所述弹簧4的一端抵接在活动支架5上,另一端经由橡胶套3抵接在壳体4上。在主体的端盖13的内侧设有容纳弹簧9的一端的开口,在电池压板7上设有容纳弹簧9的另一端的开口并该开口内设有橡胶垫8,所述弹簧9的一端抵接在端盖13上,另一端经由橡胶垫8抵接在电池压板7上。所述弹簧4、9、活动支架5及导轨、橡胶圈3和橡胶垫8构成弹簧阻尼结构,通过该弹簧阻尼结构调整系统的谐振频率范围,可有效减小旋转机械表面振动对探头内部电路器件的影响。在一些实施方式中,所述电子装置总成结构、壳体11、加速度计2以及磁力座1基本同轴。
47.在示例性实施方式中,电路模块12与电池6电连接,由电池6进行供电。所述电路模块12包括调理模块、处理模块和无线收发模块。所述调理模块内部包含恒流源电路和增益滤波电路,恒流源电路为加速度计提供电源,并从恒流源端提取振动的电信号,增益滤波电路对电信号的幅值和频带进行调整。调理模块输出的电信号进入处理模块,完成模数转换。所述处理模块通过所述无线收发模块与外部设备进行通信。所述处理模块与无线收发模块通讯,具有无线校时和传输功能,并且通过无线广播校时完成布置在不同测试点的多个振动探头的内部电路的时钟同步。所述处理模块通过无线收发模块,实时接收旋转机械的转速信息,同步振动信号与角域转速信号,并完成等时基采样向等角域采样的转换。
48.下面结合图2对所述处理模块的处理逻辑进行说明。
49.在一些实施方式中,通过测试确定传递函数,并预先存储在存储器中,例如,存储在探头的内存中。
50.在所述主体与探头前端(前端包括加速度计和磁力座)分离的情况下,将所述加速度计和磁力座安装于所述旋转机械,信号通过柔性电缆传输给主体,其测得该测点的振动时域信号v0(t)和其对应的频谱v0(f),此时,因为加速度计和磁力座的相对质量很小,产生的附加质量效应忽略不计。
51.将所述主体、加速度计和磁力座组装在一起的情况下,测得该测点的振动时域信号v0′
(t)和其对应的频谱v0′
(f),此时,需考虑探头附加质量效应对测试的影响;
52.由于探头刚性安装在减速器表面,对测点位置处的动力学模型影响,可简化为在系统中串联入了一个附加质量效应环节。
53.设附加质量效应环节的传递函数为m(f),其傅里叶逆变换为脉冲响应函数m(t),则:
54.v0′
(t)=v0(t)*m(t)
[0055]v0
′
(f)=v0(f)
·
m(f)
ꢀꢀ
(1)
[0056]
按照式(1),根据所述振动时域信号v0(t)和其对应的频谱v0(f)、所述振动时域信号v0′
(t)和其对应的频谱v
′
(f),计算得到传递函数m(f)和脉冲响应函数m(t),相应的阶次谱修正系数为m(σ);
[0057]
将所述传递函数m(f)保存在所述存储器中。
[0058]
在一些实施方式中,所述电子装置对由加速度计2产生的振动时域信号进行处理包括:
[0059]
1)所述处理模块通过无线收发模块实时接收所述旋转机械的转速信号r(t),结合所述转速信号对所述振动时域信号v(t)进行重采样,得到等角域信号v(θ)。
[0060]
对于旋转机械,在其表面测得的振动时域信号v(t)可近似用公式(2)表示:
[0061]
v(t)=g(t)+∑kg(t)eg(t)+∑kb(t)eb(t)+n(t)
ꢀꢀ
(2)
[0062]
t
–
表示时间;
[0063]
kg(t)-表示与起重机减速器齿轮啮合相关的振动信号;
[0064]eg
(t)-表示与起重机减速器齿轮所在轴转动相关的振动信号;
[0065]
g(t)-表示与起重机减速器各轴转频相关的频率较低的振动信号;
[0066]
∑kb(t)eg(t)-表示起重机减速器滚动轴承异常振动与干扰信号;
[0067]
n(t)-表示其它振动干扰噪声信号。
[0068]
旋转机械的输入轴为参考轴,转角为θ(t),运动方程简化为:
[0069]
θ(t)=b0+b1τ+b2τ2ꢀꢀ
(3)
[0070]
式中,b0、b1、b2为待定系数。
[0071]
通过无线传输模块接收的转速信号即转速时间序列r(t)和对应的时间戳序列,转速信息矩阵为:
[0072][0073]
依次取相邻转速向量:[θiτi]、[θ
i+1
τ
i+1
]、[θ
i+2
τ
i+2
],i∈[1,n-2],代入式(3),求出b0、b1、b2的值。
[0074]
设等角域间隔为δθ,根据式(3)求出恒定角增量δθ所对应的时间t,即:
[0075][0076]
其中,k为插值系数,θ=kδθ0[0077]
根据式(4)求出重采样后的时间序列其对应等角域θ。对振动信号v(t)进行插值计算,得到等角域对应采样时刻的振动信号幅值即等角域信号v(θ)。
[0078]
2)所述处理模块对所述等角域信号v(θ)进行傅里叶变换(fft)得到初始阶次谱v(σ)。
[0079]
3)所述处理模块根据所述转速信号的跟踪频率,提取预先存储的传递函数m(f),以得到阶次谱修正系数m(σ)。具体地,由转速时间序列r(t)(单位为rpm),计算转速频率的
时间队列f(t)=r(t)/60(单位为hz)。设所述处理模块对所述等角域信号v(θ)进行傅里叶变换(fft)数据帧的时间为ti,则为整数。m(f)的自变量取σ,即得m(σ)。
[0080]
4)所述处理模块采用所述阶次谱修正系数m(σ)对初始阶次谱v(σ)进行修正得到最终阶次谱v
′
(σ),并统计、归类后入数据库,即振动阶次谱库。其中,修正公式为:
[0081]
v(σ)=v
′
(σ)/m(σ)
[0082]
在一些实施方式中,所述处理模块的处理还包括:
[0083]
计算入库的阶次谱平均曲线,并设定阈值;例如,计算入库的阶次谱平均曲线,通过大量试验汇总数据,统计出概率分布,由置信度p(例如可设定为90%)确定旋转机械状态评判的阈值;
[0084]
将当前测试得到的阶次谱与所述阈值进行比较,若超出所述阈值,则发出表示所述旋转机械振动异常或有潜在故障的指示。
[0085]
在一些实施方式中,所述处理模块可通过所述无线收发模块向外部设备发送所述最终阶次谱。外部设备或用户可以对所述最终阶次谱进行分析,以进行故障诊断。
[0086]
虽然本发明是以起重机减速器作为测试对象作出的,但是本发明也适用于其他旋转机械。
[0087]
本领技术人员应当理解,以上所公开的仅为本发明的实施方式而已,当然不能以此来限定本发明请求专利保护的权利范围,依本发明实施方式所作的等同变化,仍属本发明之权利要求所涵盖的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1