一种航天航空一体化卫星大场景制作方法与流程
1.本发明属于铁路勘测技术领域,具体涉及一种航天航空一体化卫星大场景制作方法。
背景技术:
2.三维信息是勘测领域重要的信息基础,为智能应用场景与高层应用平台提供底层数据,因此三维信息的获取、展示、量测等技术为重要的空间地理信息技术。
3.现有的三维获取技术分为主动和被动两种,其中主动类型中包含人工量测与激光点云扫描,被动方式主要为以遥感影像为主。主动方式的三维获取方式存在设备成本高、操作需要先验知识的加持、工程成本大;被动方式是以相机被动感知后再进行重建运算,其大量的工作都被压缩到内业的自动化重建计算,外业采集效率高,精度可控,技术门槛低,成本低。因此采用摄影测量方式进行三维数据空间采集,已成为现行主要的三维数据获取手段,然而却存在三维重建计算代价大,时间漫长,而且三维成果易受到弱纹理、匹配误差、环境条件的影响,使得三维模型存在褶皱、扭曲,平面平整度低。故使用航空大场景立体成像技术被提出。
4.现有航空大场景立体成像方法都是针对单一航空平台的,没有考虑航天平台数据,未提出更为一般性的遥感大场景立体生成与量测方法。
技术实现要素:
5.为了弥补现有技术的不足,本发明提供一种航天航空一体化卫星大场景制作方法,
6.为了实现上述目的,本发明所采用的技术方案为:
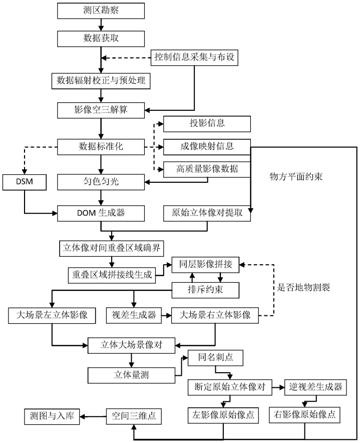
7.一种航天航空一体化卫星大场景制作方法,包括如下步骤:
8.步骤一:按照项目的需求对测区进行勘测,获取测区的基本情况;
9.步骤二:根据测区项目的要求,结合测区的具体情况,获取适宜分辨率的遥感影像数据;
10.步骤三:对遥感影像数据进行空三解算;
11.步骤四:通过数据标准化,形成标准化的航天航空一体化基础数据工程文件;
12.步骤五:对标准化后的遥感影像数据进行匀色匀光处理;
13.步骤六:生成指定分辨率的dom数据;
14.步骤七:生成立体像对间重叠区的立体拼接线;
15.步骤八:生成大场景立体模型;
16.步骤九:通过立体量测,获取三维地物点的坐标。
17.具体地,所述步骤八包括:
18.8.1根据步骤七中的拼接区域,结合dsm/dem,进行数字微分纠正生成dom数据,作为大场景左立体影像数据;
19.8.2通过视差生成器进行偏移像素点,重复数字微分纠正过程,生成大场景右立体影像数据。
20.本发明的有益效果:
21.1)本发明统一了航空航天影像差异性带来的理论差异,使其在大场景制作与测图中,无须关心何种数据源和平台数据,相对于现有的方法泛化了大场景理论,扩大了大场景的应用领域,完全覆盖了大中小比例测图的需求;
22.2)本发明为勘察工程提供了可选的三维勘察手段,根据需求、分辨率、范围、成本的因素,在测区选择最适合的三维数据感知方式。
附图说明
23.图1为航空航天立体大场景生成流程图;
24.图2为遥感影像物方与像方映射关系图;
25.图3为大场景立体量测技术流程图。
具体实施方式
26.下面结合具体实施方式对本发明进行详细的说明。
27.本发明提出航天航空一体化的立体场景生成方法,同时满足对异构数据的需求,完成大场景的理论的升华,具体包括如下步骤:
28.步骤一:按照项目的需求对测区进行勘测,获取测区的基本情况,如测区范围、测区走势、测区起伏等数据;
29.步骤二:根据测区项目的要求,结合测区的具体情况,获取适宜分辨率的遥感影像数据;
30.如果为航空数据,则需要提前进行空域申请和航线规划,可选事前、事后两种控制点布设方式;如果为航天数据,则需要摘选出时间跨度小、少云的清晰数据,往期数据一般选择的是事后布设控制点的方式。控制点布设应该满足相关航测规范要求。
31.步骤三:对遥感影像数据进行空三解算;
32.根据前步骤获取的影像与控制点,还需对遥感数据进行空间姿态解算与几何校正工作,恢复出地面点到像点的映射关系,如公式1所示:
[0033][0034]
其中,xc(j,i)代表影像j中投影点i的像素坐标,下标c表述影像坐标系,下标o代表物方坐标系,xo(i)代表物方点,为物方坐标系到像点的映射关系。中可包含成像过程中的数学映射关系,包括共线方程、有理函数模型、相机畸变模型、地理投影变换,如图2所示。遥感影像的空三解算就是在已知{xc(j,i),xo(i)}求取对应的映射关系具体表达。
[0035]
步骤四:通过数据标准化,形成标准化的航天航空一体化基础数据工程文件;
[0036]
数据的标准化主要是解决不同数据源、不同平台产生的基础数据差异性,具体包括通过影像信息的重映射解决高bit位影像的灰度化过程;通过对不同映射关系的抽象,提取标准化接口;动态接入地理投影映射变换关系;形成标准化的航天航空一体化基础数据工程文件。
[0037]
步骤五:对标准化后的遥感影像数据进行匀色匀光处理;
[0038]
遥感影像的采集通常伴随着异源时空的影响,导致遥感影像存在明显的色彩、色调差异,因此需要综合考虑测区大场景的一致性表达,消除其对大场景立体表达的影响。
[0039]
步骤六:生成指定分辨率的dom数据;
[0040]
根据dsm和影像的映射关系生成指定分辨率的dom,每一张影像的dom数据主要用作于后续拼接线的生成,使其避免地物撕裂的情况出现;
[0041]
步骤七:生成立体像对间重叠区的立体拼接线;
[0042]
步骤八:生成大场景立体模型;
[0043]
8.1根据步骤七中的拼接区域,结合dsm/dem,进行数字微分纠正生成dom数据,作为大场景左立体影像数据;
[0044]
8.2通过视差生成器进行偏移像素点,重复数字微分纠正过程,生成大场景右立体影像数据。
[0045]
视差生成器可采用立体像对的参考航高h、地面点高度z、基准高度z0,基线长度b生成,如公式2所示:
[0046][0047]
步骤九:通过立体量测,获取三维地物点的坐标。
[0048]
立体量测为大场景左、右立体影像同名点到物方同名点的过程,如图3所示。首先大场景左影像同名点反算出原始影像点;然后大场景右立体影像通过逆视差生成器和映射关系,反算出原始影像点;接着根据公式1映射关系列出关于原始同名影像点的超定方程组,如公
[0049]
式3所示,即可获取三维地物点的坐标。
[0050][0051]
应用实例:使用某地区的worldview-3影像,通过本发明专利生成航天高分辨率卫星影像大场景立体模型,然后采用立体量测的方式,在左右大场景影像中刺同名点,此时得到的同名点为地理投影坐标。接着左同名点通过映射到原始左影像中,右影像需联合逆视差生成器和映射函数投影至原始右影像中。最终通过对比重投影误差,等效中误差可以达到1个像素之内。
[0052]
本发明的内容不限于实施例所列举,本领域普通技术人员通过阅读本发明说明书而对本发明技术方案采取的任何等效的变换,均为本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1