一种海洋拖曳调查水下单元缺失定位数据的恢复方法与流程
:
1.本发明涉及海洋调查中水下单元定位技术领域,尤其涉及一种海洋拖曳调查水下单元缺失定位数据的恢复方法。
2.问题背景:
3.在海洋拖曳调查中,声学定位系统是常用的对水下单元进行定位跟踪的设备。该系统通过安装在调查船舶底部的换能器基阵,接收水下单元搭载的应答器发出的声学信号,获取水下单元与调查船舶之间的距离和方向角,进而计算得到水下单元的地理经纬度坐标。在实际的应用中,经常会发生由于声学信号被遮挡或设备通讯故障而导致定位数据缺失的情况。定位数据的缺失将导致拖曳调查期间水下单位难以精确追踪,这将大大降低拖曳调查获取数据的可靠性。
技术实现要素:
4.本发明针对水下拖曳调查调查中常见的水下单元定位数据缺失的问题,提出一种水下单元缺失定位数据的恢复方法。通过船舶gps位置数据和拖曳过程中定时记录缆长数据,建立水下单元缺失定位数据的恢复模型,利用该模型来恢复水下单元缺失的定位数据,
5.本发明的目的是通过以下技术方案来实现的:一种海洋拖曳调查水下单元缺失定位数据的恢复方法,包括以下步骤:
6.(1)建立拖曳测线信息表,在表中标明测线开始和结束的时间和经纬度;
7.(2)对船舶gps位置数据和水下单元已有的定位数据进行标准化预处理;水下单元已有的定位数据包括经度、纬度和深度数据;
8.(3)根据标准化后的船舶gps位置数据和已有定位数据,绘制水下单元缺失定位数据的预估基准线,以此基准线为依据,创建预估基准线的调整参数集,生成多条水下单元定位数据缺失部分的预估路径,构建水下单元缺失定位数据恢复模型;
9.(4)结合调查区域的多波束地形和定时记录的缆长数据,计算水下单元缺失定位数据恢复模型中各条预估路径的理论缆长,并与定时记录的缆长数据进行对比,得到最优预估路径,作为拖曳测线定位数据缺失部分的恢复路径。
10.进一步地,所述步骤(2)具体包括以下步骤:
11.(2-1)利用hampel滤波标准算法滤除船舶gps位置数据和已有定位数据中的离群值,通过一维线性插值算法将以上两类数据转换为时间间隔为1秒的平滑数据,将拖曳测线信息表中记录的测线开始和结束时间作为近底工作时间段,截取以上两类数据在近底工作时间段内的平滑数据;
12.(2-2)将截取后的船舶gps数据和已有定位数据的时间(格式为yyyy-mm-dd hh:mm:ss)转换为自公元元年起的天数值time
gps
和time
usbl
,将其减去各自近底工作的开始时间time
gpsstart
和time
usblstart
,得到水下单元缺失定位数据恢复模型的输入时间数据和
[0013][0014][0015]
(2-3)将船舶gps经纬度数据lon
gps
,lat
gps
和已有定位经纬度数据lon
usbl
,lat
usbl
由以下公式进行转化,得到水下单元缺失定位数据恢复模型的输入经纬度数据和
[0016][0017][0018]
其中lon
gpsstart
和lat
gpsstart
为近底工作开始时船舶gps位置数据的经纬度值,lon
usblstart
和lat
usblstart
为近底工作开始时已有定位数据的经纬度值。
[0019]
进一步地,所述步骤(3)具体包括以下步骤:
[0020]
(3-1)以和为横轴,为纵轴,绘制船舶gps位置数据和已有定位数据的时间和位置对比图,根据船舶gps路径和已有定位路径的运动趋势,绘制一条与船舶拖曳趋势一致的路径,其经纬度值分别为和作为水下单元缺失定位数据恢复模型的预估基准线;
[0021]
(3-2)以预估基准线路径上的经纬度值和为基础,考虑到拟合计算的准确性和计算效率,采用五次多项式拟合的方法计算其与拟合获取的系数集{pi}和{qi};这两个参数集分别满足:
[0022][0023][0024]
(3-3)创建预估基准线的调整参数集{αj},根据以下公式对预估基准线的经纬度值进行调整,生成k条水下单元预估路径,其坐标经纬度值表示为和
[0025][0026][0027]
调整参数α的取值范围为:-0.1<α1<0.1,-0.1<α2<0.1,-0.2<α3<0.2,-0.5<α4<0.5,5<α5<5,同时考虑到计算效率,k≤50。
[0028]
进一步地,所述步骤(4)具体包括以下步骤:
[0029]
(4-1)在一条预估路径上选取一个与缆长记录时间点相对应的坐标点,结合调查区域多波束地形数据,通过二维线性插值得到该坐标点的水深数据,根据以下公式计算拖曳过程中水下单元在该坐标点的理论缆长数据l:
[0030][0031]
其中h为该坐标点与船舶位置之间的距离,d为该坐标点所在水深;计算该预估路径上所有与缆长记录时间点相对应的坐标点水深数据,得到该预估路径上所有对应坐标点的理论缆长集合{lm},其中m为拖曳测线定时记录缆长数据的个数;
[0032]
(4-2)在调整参数集{aj}中选择不同的参数值,对每一条预估路径的理论缆长集合进行计算,得到k组理论缆长集合{lm}k;利用最小二乘准则,根据以下公式计算理论缆长数据与定时记录缆长数据的误差平方和s:
[0033][0034]
其中l
record
为定时记录缆长数据的值,在k组s值中选取s值最小的预估路径作为最优预估路径;
[0035]
(4-3)根据以下公式将最优预估路径的经纬度坐标点和转化为地理坐标的经纬度值lon
usbl”和lat
usbl”,得到该测线定位数据缺失部分的恢复路径;
[0036][0037]
本发明的有益效果:
[0038]
本发明根据船舶gps位置数据和已有的水下单元定位数据,建立水下单元缺失定位数据恢复模型,结合拖曳测线所在区域的海底地形数据和定时记录缆长数据,恢复水下单元在拖曳过程中缺失的定位数据。经实施例检验,通过本发明提供的方法恢复的水下单元定位数据较为准确,大大提高了海洋拖曳调查中采集数据的可靠性。
附图说明:
[0039]
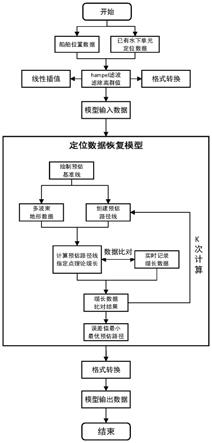
图1是本发明方法的具体流程示意图。
[0040]
图2是本发明方法水下单元预估基准线和预估路径的生成过程示意图。
[0041]
图3是本发明方法得到的最优预估路径上指定点缆长值与定时记录缆长值的对比图。
[0042]
图4是本发明方法得到的最优预估路径对比效果图。
[0043]
图5是本发明方法得到的最优预估路径水深对比效果图。
具体实施方式:
[0044]
为了更为具体地描述本发明,下面结合附图及具体实施方式对本发明的技术方案进行详细说明。
[0045]
在本实施例中,为更好的检验本发明对水下单元缺失定位数据恢复的效果,在实施例中选取一条定位数据完整的海洋拖曳调查测线,截取其开始段部分定位数据作为水下单元缺失定位数据恢复模型的输入数据,经水下单元缺失定位数据恢复模型计算得到最优预估路径,并将该结果与该测线完整的定位数据进行比对。
[0046]
实施例:
[0047]
如图1所示,本发明提供了一种拖曳调查水下单元缺失定位数据的恢复方法,具体实施例主要包括以下步骤:
[0048]
步骤1,建立拖曳测线信息表,在表中标明测线开始和结束的时间和经纬度;
[0049]
步骤2,利用hampel滤波标准算法滤除船舶gps位置数据和已有定位数据中的离群值,通过一维线性插值算法将以上两类数据转换为时间间隔为1秒的平滑数据,将拖曳测线
信息表中记录的测线开始和结束时间作为近底工作时间段,根据拖曳测线信息表,截取以上两类数据在水下单元的近底工作时间段内数据值,作为水下单元定位缺失定位数据恢复模型的输入数据;
[0050]
步骤3,将船舶gps数据和已有定位数据的时间(格式为yyyy-mm-dd hh:mm:ss)转换为自公元元年起的天数值time
gps
和time
usbl
,将其减去各自近底工作的开始时间time
gpsstart
和time
usblstart
,得到水下单元定位缺失定位数据恢复模型的输入时间数据和
[0051][0052][0053]
步骤4,将船舶gps经纬度数据lon
gps
,lat
gps
和已有定位经纬度数据lon
usbl
,lat
usbl
由以下公式进行转化,得到水下单元缺失定位数据恢复模型的输入经纬度数据和
[0054][0055][0056]
其中lon
gpsstart
和lat
gpsstart
为近底工作开始时船舶gps位置数据的经纬度值,lon
usblstart
和lat
usblstart
为近底工作开始时已有定位数据的经纬度值。
[0057]
步骤5,绘制船舶gps位置数据和已有定位数据的时间和位置对比图(以和为横轴,为纵轴),根据船舶gps路径和已有定位路径的运动趋势,绘制一条与船舶拖曳趋势一致的路径,其经纬度值分别为和作为水下单元缺失定位数据恢复模型的预估基准线;
[0058]
步骤6,以预估基准线路径上的经纬度值和为基础,计算其与拟合获取的系数集{pi}和{qi}。考虑到拟合计算的准确性和计算效率,该步骤建议采用五次多项式拟合的方法。这两个参数集分别满足:
[0059][0060][0061]
步骤7,创建预估基准线的调整参数集{αj},根据以下公式对预估基准线的经纬度值进行调整,生成k条水下单元预估路径,其坐标经纬度值表示为和
[0062][0063][0064]
调整参数α的建议取值范围为:-0.1<α1<0.1,-0.1<α2<0.1,-0.2<α3<0.2,-0.5<α4<0.5,5<α5<5,同时考虑到计算效率,建议k≤50;
[0065]
步骤8,在一条预估路径上选取一个与缆长记录时间点相对应的坐标点,结合调查
区域多波束地形数据,通过二维线性插值得到该坐标点的水深数据,根据以下公式计算拖曳过程中水下单元在该坐标点的理论缆长l:
[0066][0067]
其中h为该坐标点与船舶位置之间的距离,d为该坐标点所在水深。计算该预估路径上所有对应缆长记录时间点的坐标点水深数据,得到该预估路径上所有对应坐标点的理论缆长集合{lm},其中m为拖曳测线定时记录缆长数据的个数;
[0068]
步骤9,在调整参数集{aj}中选择不同的参数值,对每一条预估路径的理论缆长集合进行计算,得到k组理论缆长集合{lm}k。利用最小二乘准则,根据以下公式计算理论缆长数据与定时记录缆长数据的误差平方和s:
[0069][0070]
其中l
record
为定时记录缆长数据的值,在k组s值中选取s值最小的预估路径作为最优预估路径;
[0071]
步骤10,根据以下公式将最优预估路径的经纬度坐标点和转化为地理坐标的经纬度值lon
usbl”和lat
usbl”,得到该测线定位数据缺失部分的恢复路径。
[0072][0073]
图2是本发明方法水下单元预估基准线和预估路径的生成过程示意图。图2中的(a1)和(b1)中细点划线表示的是船舶gps位置数据,粗实线表示的是部分缺失的定位数据;图2中的(a2)和(b2)表示的是根据图2中的(a1)和(b1)中两条线的变化趋势,手动绘制的水下单元预估路径基准线(粗虚线);图2中的(a3)和(b3)表示的是根据图2中的(a1)和(b1)中水下单元预估路径基准线,生成的30条水下单元预估路径(细实线)。
[0074]
图3本发明方法通过水下单元缺失定位数据恢复模型,计算得到的最优预估路径上指定点缆长值与定时记录缆长值得对比图。其中实心三角形为最优预估路径指定点的理论缆长值,空心方块为同时间点拖曳测线定时记录缆长值。
[0075]
图4展示了通过水下单元缺失定位数据恢复模型,计算得到的最优预估路径。其中粗点划线表示的是水下单元的最优预估路径,粗实线表示的是船舶运动路径,细虚线表示的是完整定位得到的水下单元路径。由图可得,在输入数据为部分缺失的定位数据的条件下,恢复所得的水下单元最优预估路径与定位数据所得的路径基本一致。
[0076]
图5展示了通过水下单元缺失定位数据恢复模型,计算得到的最优预估路径水深值随时间变化图。其中粗点划线表示的是水下单元最优预估路径的水深变化,粗实线表示的是沿船舶拖曳路径的水深变化,细虚线表示的是完整定位数据的水深变化。由图可得,在输入数据为部分缺失的定位数据的条件下,恢复所得的水下单元最优预估路径的水深值与完整定位数据水深值相差较小,与沿船舶拖曳路径的水深变化趋势一致。
[0077]
以上所述的具体实施方式对本发明的技术方案和有益效果进行了详细说明,应理解的是以上所述仅为本发明的最优选实施例,并不用于限制本发明,凡在本发明的原则范围内所做的任何修改、补充和等同替换等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1