多冲击波形发生装置及方法与流程
1.本发明涉及环境和可靠性试验领域,具体涉及一种多冲击波形发生装置及方法。
背景技术:
2.随着国家质量提升行动的深入开展,产品设备在研制、生产和鉴定过程中都要进行各方面的试验和检测,试验量和试验的复杂度增加。冲击试验是其中一项重要的试验内容,用于评估产品设备在其寿命期内可能经受的机械冲击环境下的结构和功能特性。目前冲击试验波形一般包括半正弦波、后峰锯齿波、梯形波。半正弦波主要使用毡垫和橡胶垫发生;后峰锯齿波主要使用铅坠发生;梯形波主要使用氮气罐发生。这些方法主要依靠经验来控制冲击力大小和波形发生器,且需通过多次预测试,效率较低且控制精确度不高,尤其在冲击响应谱试验中。此外铅坠为一次性使用,还需回收重铸。另外,现有技术还包括使用气缸、活塞、法兰及橡皮垫进行组合,通过改变橡皮垫、气缸内压力以及开关装置来发生上述波形;使用小孔油液阻尼来对波形进行控制,产生不同种波形;使用金属圆管扩张变形原理来实现梯形波等。上述方式存在重复性差、难以实现自动化等问题。
技术实现要素:
3.本发明的目的是提供一种多冲击波形发生装置及方法,能够实现多波形的主动控制,实现冲击试验的自动化。
4.本发明的一个方面提供一种多冲击波形发生装置,包括冲击台、加速度传感器、计算机控制系统、磁流变阻尼器、刚度可调弹簧、控制器和触发开关;所述冲击台包括台面和底座,所述加速度传感器安装在所述冲击台的台面上,用于测量所述台面的加速度信号并传输至所述计算机控制系统;所述磁流变阻尼器和所述刚度可调弹簧并联固定在所述冲击台的底座上,所述磁流变阻尼器和所述刚度可调弹簧构成波形发生器,所述控制器用于对所述磁流变阻尼器和所述刚度可调弹簧进行控制,所述计算机控制系统用于将进行所述控制的信息传递给所述控制器,所述触发开关用于检测出所述台面的运动,并将运动开始信号并传递给所述控制器。
5.优选地,所述多冲击波形发生装置还包括安装夹具,所述安装夹具的下端与所述冲击台的底座固定连接,顶部设置有受冲击板,中间并联安装有所述磁流变阻尼器和所述刚度可调弹簧。
6.本发明的另一方面提供一种利用上述的多冲击波形发生装置的多冲击波形发生方法,包括:
7.步骤s1:将被测对象放置在所述冲击台的台面上;
8.步骤s2:在所述计算机控制系统中输入初始的目标波形函数a=f(t),t1≤t≤t2,并离散为加速度-时间函数t
离散
为离散颗粒;
9.步骤s3:所述计算机控制系统根据目标波形函数得到目标阻尼函数和所述刚度可调弹簧的初始刚度,并根据所述目标阻尼函数以及所述磁流变阻尼器的特征函数计算出控制电流函数;
10.步骤s4:将所述刚度可调弹簧的刚度调节至所述初始刚度,使所述冲击台的台面开始运动,所述触发开关检测到所述台面的运动,将运动开始信号传递给所述控制器,所述计算机控制系统将所述控制电流函数传递给所述控制器,所述控制器利用所述控制电流函数对所述磁流变阻尼器进行控制,所述加速度传感器测量得到实际波形a(n)
实际
并传输至所述计算机控制系统;
11.步骤s5:所述计算机控制系统按照a(n)
下一次目标
=a(n)
初始目标
+a(n)
本次目标-a(n)
实际
计算下一次预试验的目标波形函数a(n)
下一次目标
,其中,a(n)
本次目标
为本次预试验的目标波形函数,a(n)
初始目标
为初始的目标波形函数,重复步骤s3-s4进行下一次预实验,直到实际波形a(n)
实际
达到规定容差。
12.优选地,在步骤s3中,如下得到目标阻尼函数c(n):
[0013][0014]
其中,m为被测对象与所述台面的总重量;a(n)为台面的加速度;v0为台面的初始速度,即台面与波形发生器接触时的速度;t为台面与波形发生器接触后的时间,k为所述刚度可调弹簧的刚度,fy为库伦阻尼力。
[0015]
优选地,设所述磁流变阻尼器的阻尼可调范围为[c1,c2],将可控性最优定义为最小,通过数值方法得到台面的初始速度v0和所述刚度可调弹簧的初始刚度。
[0016]
优选地,在步骤s4中,所述控制器接收到所述运动开始信号后开始计时,经过台面开始运动至台面与波形发生器接触前一刻所需时间δt后,利用所述控制电流函数对所述磁流变阻尼器的阻尼和所述刚度可调弹簧的刚度进行控制。
[0017]
优选地,在步骤s3中,如下计算出控制电流函数:
[0018]
设电流加载时间为t
电流
,所述磁流变阻尼器在电流ii时的响应函数为i为正整数,则控制电流函数为:
[0019]
取时的i,
[0020]
优选地,所述目标波形包括标准的半正弦波、后峰锯齿波、梯形波以及不规则冲击波形。
[0021]
本发明的多冲击波形发生装置及方法能够准确计算冲击工况并对阻尼进行精确控制,能够在不更换设备及配件、不进行多次预实验的情况下实现多波形的主动控制。
附图说明
[0022]
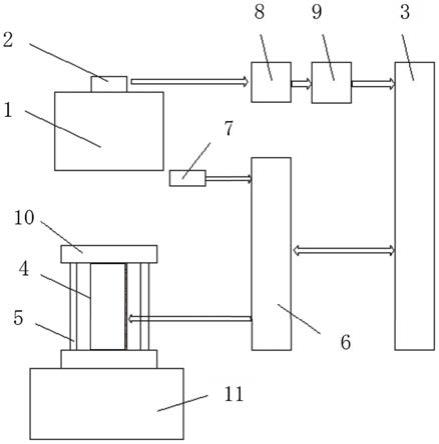
图1为本发明一种实施方式的多冲击波形发生装置的构成示意图。
[0023]
图2为本发明一种实施方式的多冲击波形发生方法的流程图。
[0024]
图3为本发明一种实施方式的磁流变阻尼器的响应曲线。
[0025]
图4为本发明一种实施方式的多冲击波形发生方法的试验效果图。
具体实施方式
[0026]
为了使本领域的技术人员更好地理解本发明的技术方案,下面将结合附图对本发明的具体实施方式作进一步的详细说明。
[0027]
本发明实施方式提供一种多冲击波形发生装置,本发明实施方式的多冲击波形发生装置的基本原理是使用刚度可变弹簧和磁流变阻尼器组合形成刚度可调、阻尼实时可变的系统,以此系统作为冲击试验中的波形发生器,通过改变刚度和阻尼来实现对冲击波形的控制。
[0028]
图1为本发明一种实施方式的多冲击波形发生装置的构成示意图。如图1所示,本发明实施方式的多冲击波形发生装置包括冲击台、加速度传感器2、计算机控制系统3、磁流变阻尼器4、刚度可调弹簧5、控制器6和触发开关7。
[0029]
冲击台包括台面1和底座11,在进行冲击试验时,被测对象放置于冲击台的台面1上,冲击台可以是垂直冲击台、水平冲击台、摆锤冲击台或者其他类型的冲击台。图1的例子中,冲击台为垂直冲击台,台面1可以在重力的作用下向下运动,与波形发生器冲击产生冲击波形。
[0030]
加速度传感器2安装在冲击台的台面1上,用于测量台面1的加速度信号并传输至计算机控制系统3。磁流变阻尼器4和刚度可调弹簧5并联固定在所述冲击台的底座11上。磁流变阻尼器4和刚度可调弹簧5组合形成冲击试验中的波形发生器,来实现冲击波形的控制。
[0031]
控制器6用于对磁流变阻尼器4的阻尼和刚度可调弹簧5的刚度进行控制,计算机控制系统3用于将进行该控制的信息传递给控制器6。触发开关7用于检测台面1的运动开始信号并传递给控制器6。触发开关7例如是光电开关传感器,能够检测出台面1运动通过触发开关7安装处的时刻。
[0032]
在一个具体实施例中,本发明实施方式的多冲击波形发生装置还包括连接在加速度传感器2与计算机控制系统3之间的试调放大器8和数据采集器9,加速度传感器2将加速度信号输出至试调放大器8,试调放大器8将加速度信号从电荷信号转化为电压信号并输出至数据采集器9,数据采集器9将电压信号转化为数字信号并输出至计算机控制系统3。
[0033]
在一个具体实施例中,为了将磁流变阻尼器4和刚度可调弹簧5并联固定在冲击台的底座11上,本发明实施方式的多冲击波形发生装置还可以包括安装夹具10,安装夹具10的下端与冲击台的底座11固定连接,顶部设置有受冲击板,中间并联安装磁流变阻尼器4和刚度可调弹簧5。受冲击板在冲击试验中与台面1产生冲击。
[0034]
本发明实施方式还提供一种利用上述的多冲击波形发生装置的多冲击波形发生方法。图2为本发明一种实施方式的多冲击波形发生方法的流程图。如图2所示,本发明实施方式的多冲击波形发生方法包括步骤s1-s5。
[0035]
在步骤s1中,将被测对象放置在冲击台的台面1上,准备好进行冲击试验。在该步骤中,可以测量被测对象与冲击台的台面1的总重量m,并输入计算机控制系统3,作为后续计算中的一个输入条件。
[0036]
在步骤s2中,在计算机控制系统3中输入初始的目标波形函数a=.f(t),t1≤t≤t2,并离散为加速度-时间函数离散颗粒为t
离散
。所述目标波形既可以是国家标准中的半正弦波、后峰锯齿波、梯形波,也可以是其它不规则冲击波形。
[0037]
在步骤s3中,计算机控制系统3根据目标波形函数得到目标阻尼函数和刚度可调弹簧5的初始刚度,并根据所述目标阻尼函数以及磁流变阻尼器4的特征函数计算出控制电流函数。
[0038]
在该步骤中,可以如下得到目标阻尼函数乙(n):
[0039][0040]
其中,m为被测对象与冲击台的台面的总重量;a(n)为台面的加速度;v0为台面与波形发生器接触时的速度;t为台面与波形发生器接触后的时间,k为刚度可调弹簧5的刚度,fy为库伦阻尼力。
[0041]
以下说明上式(1)的推导过程。
[0042]
在图1的状态下开始冲击试验后,被测对象与台面1在重力的作用下向下运动,台面1与由磁流变阻尼器4和刚度可调弹簧5组合形成的波形发生器发生接触,从而产生冲击。冲击过程的初始位移为0,磁流变阻尼器4的磁流变模型使用bingham模型:其中,f
阻尼器
为磁流变阻尼器4输出的阻尼力,fy为库伦阻尼力,c为阻尼系数,f0为补偿力,x为位移,也可使用其他模型。
[0043]
在冲击过程中,台面1受到刚度可调弹簧5的弹力f
弹簧
、磁流变阻尼器4的阻尼力f
阻尼器
以及重力(可忽略)的作用,则动力学方程可以为:
[0044]
ma+f
弹簧
+f
阻尼器
=0
ꢀꢀꢀ…
(2)
[0045]
其中,m为被测对象与台面1的总重量;a为台面1的加速度,f
弹簧
=kx,k为刚度可调弹簧5的刚度(弹性系数),x为台面1与波形发生器接触后的位移。将f
弹簧
与f
阻尼器
的表达式代入式(2)可以得到:
[0046][0047]
忽略补偿力f0,得到冲击过程模型为:
[0048][0049]
式中v0为台面的初始速度,即台面与波形发生器接触时的速度;t为台面与波形发生器接触后的时间。
[0050]
根据上述冲击过程模型推导出目标阻尼函数c(n)为:
[0051][0052]
优选地,在该步骤中,以可控性最优为目标计算出初始速度v0、以及刚度可调弹簧5的初始刚度k0。具体地,设磁流变阻尼器4的阻尼可调范围为[c1,c2],刚度可调弹簧5的刚度可调范围为[k1,k2],台面1的初始速度可调范围为[v1,v2]。因为磁流变阻尼器4在可调范围边界处的控制效果不好,故将可控性最优定义为最小,遍历可调范围内的速度和刚度,通过数值方法找到使最小时的初始速度v0、初始刚度k0。
[0053]
在步骤s3中,如上所述得到目标阻尼函数c(n)后,进而根据所述目标阻尼函数c(n)以及磁流变阻尼器4的特征函数计算出控制电流函数i(n)。使用基于时间的开环控制,克服冲击试验时间极短,控制困难的问题。
[0054]
由于冲击过程时间极短,因此使用反馈控制不现实,而磁流变阻尼器4的磁流变液形成时间虽然是毫秒级,但仍难满足需求。故使用目标阻尼函数的导数作为控制目标,使用上述测试得到的响应函数的导数作为控制值,从而实现对阻尼的控制。
[0055]
具体地,控制电流应该按照以下方式计算:由于控制电流加载时间较为固定,设电流加载时间为t
电流
,磁流变阻尼器4在电流ii时响应函数为(i为正整数)是一定的,则控制电流函数为:
[0056]
取时的i,
[0057]
其中,δt为台面1开始运动至台面1与波形发生器接触前一刻所需时间。在激励力为重力的情况下,冲击台的台面1在重力作用下开始运动,根据台面1离开所述波形发生器的高度,估算台面1开始运动至台面1与所述波形发生器接触前一刻所需时间δt。
[0058]
在一个具体实施例中,磁流变阻尼器4的特征函数可通过如下方式构造:在可输入电流中等分选取电流ii(i为正整数),测试不同速度下磁流变阻尼器4的输出,从而获得在ii电流下的时间响应曲线该时间响应函数(i为正整数)是一定的。如图3所示为磁流变阻尼器4在速度为100mm/s、电流为3a时的响应曲线。
[0059]
在步骤s4中,将刚度可调弹簧5的刚度调节至所述初始刚度,然后使冲击台的台面1开始运动,触发开关7检测到台面1的运动,将运动开始信号传递给控制器6,计算机控制系统3将控制电流函数i(n)传递给控制器6,控制器6利用控制电流函数i(n)对磁流变阻尼器4和刚度可调弹簧5进行控制,加速度传感器2测量得到实际波形a(n)
实际
并传输至计算机控制系统3。
[0060]
在该步骤中,利用步骤s3中得到的控制电流函数i(n)进行预试验。台面1的运动由触发开关7检测到,控制器6接收到运动开始信号后记录开始时间并在经过δt时间后开始对磁流变阻尼器4的阻尼和刚度可调弹簧5的刚度进行控制,得到实际冲击波形a(n)
实际
。
[0061]
在步骤s5中,计算机控制系统3按照a(n)
下一次目标
=a(n)
初始目标
+a(n)
本次目标-a(n)
实际
计算
下一次预试验的目标波形函数a(n)
下一次目标
,其中,a(n)
本次目标
为本次预试验的目标波形函数,a(n)
初始目标
为初始的目标波形函数,重复步骤s3-s4进行下一次预实验,直到实际波形a(n)
实际
达到规定容差。实际冲击波形在容差内,则可进行正式试验。
[0062]
在该步骤中,根据实际波形a(n)
实际
纠正控制电流i(n),计算出实际波形与目标波形之差,然后将该差补到目标波形中,即a(n)
下一次目标
=a(n)
初始目标
+a(n)
本次目标-a(n)
实标
。
[0063]
以下通过一个实施例具体说明本实施方式的多冲击波形发生方法。在该实施例中,使用垂直冲击台进行后锯齿峰波冲击试验。
[0064]
输入后峰锯齿波峰值30m/s2和脉宽10ms,则波形为离散为a(n)
初始目标
,离散颗粒为100,即离散为100个点。初始刚度k0=100n/m,初始速度v0=3m/s,台面与被测对象重1kg。
[0065]
按照上述式(1)计算目标阻尼函数c(n),按照上述式(5)得到控制电流函数i(n),重复步骤s4-s5进行多次预试验,得到图4所示的试验效果图。图中直线段为理想曲线,最下方曲线为第一次预试验的实际波形曲线,从下数第二条曲线为第二次预试验的实际波形曲线,以此类推再进行3次试验得到的曲线与理想曲线接近。
[0066]
本发明实施方式的多冲击波形发生装置及方法具有如下有益效果:
[0067]
1)本发明使用实时控制的方法,可以产生标准波形以及其它不规则波形;
[0068]
2)本发明的试验方法无需人工试调判断,可以通过预试验结果修正计算,避免了人工多次预实验。
[0069]
3)本发明能够实现冲击试验的全过程自动化。
[0070]
以上只通过说明的方式描述了本发明的某些示范性实施方式,毋庸置疑,对于本领域的普通技术人员,在不偏离本发明的精神和范围的情况下,可以用各种不同的方式对所描述的实施方式进行修正。因此,上述附图和描述在本质上是说明性的,不应理解为对本发明保护范围的限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1