一种防抖动的手持式激光测距仪的制作方法
1.本技术涉及激光测距仪的领域,尤其是涉及一种防抖动的手持式激光测距仪。
背景技术:
2.手持式激光测距仪是利用激光对目标的距离进行准确测定的仪器。激光测距仪在工作时向目标射出一束的激光束,由光电元件接收目标反射的激光束,计时器测定激光束从发射到接收的时间,计算出从观测者到目标的距离。手持式激光测距仪能进行距离、面积、体积的测量,并且在室内和室外都能进行测量。
3.申请号为cn201220682454.8的中国专利公开了一种手持激光测距仪,包括内部主体结构、显示屏、按键区、激光放射接收透镜和后座,其特征是按键包括手触测量键、自动测量键和大容量存储键,后座可以弹出一个长为2cm的紧凑尾件,内部设置大容量存储计算功能。
4.针对上述中的相关技术,申请人认为在手拿仪器对目标进行水平对准后,因手的轻微抖动,会使发出的激光线束产生偏移,这样会导致误差使测量结果不够准确。
技术实现要素:
5.为了改善手的抖动对测量结果的影响,本技术提供一种防抖动的手持式激光测距仪。
6.本技术提供的一种防抖动的手持式激光测距仪采用如下的技术方案:
7.一种防抖动的手持式激光测距仪,包括按键手柄、测量装置和连接环,所述按键手柄与连接环转动连接,所述测量装置与连接环转动连接,所述按键手柄与连接环转动连接的转动轴线和所述测量装置与连接环转动连接的转动轴线在同一水平面且相互垂直,所述测量装置的重心在两个转动轴线交点的正下方。
8.通过采用上述技术方案,测量装置与连接环相对转动、按键手柄与连接环之间相对转动,在手持仪器进行测距时,手在横向和纵向上的抖动会通过测量装置、连接环和按键手柄之间的相对转动而有所化解,降低了手的抖动对仪器的影响;测量装置的重心在两个转动轴线交点的正下方,可以使测量装置保持平稳,降低了测量误差。
9.可选的,所述测量装置包括测量头与负重,所述测量头与所述负重连接。
10.通过采用上述技术方案,可以增加测量装置的重量,使测量装置不易晃动。
11.可选的,所述负重固定连接于测量头下方。
12.通过采用上述技术方案,可以降低测量装置的重心,使装置保持平稳,同时测量头与负重固定连接,便于携带、方便使用。
13.可选的,所述负重吊挂连接于测量头下方。
14.通过采用上述技术方案,负重吊挂于测量头下方,使测量装置的重心下移,增加测量头的平稳性。
15.可选的,所述测量头开有空腔,所述负重可拆卸连接于空腔内。
16.通过采用上述技术方案,测量头下壁开有空腔,在不使用仪器时,可以将负重收纳进空腔中,使仪器的携带更加方便,同时也可以节省存放仪器所需要的空间。
17.可选的,所述负重与所述空腔内壁螺纹连接。
18.通过采用上述技术方案,当负重需要收纳进空腔时,可以将负重旋入空腔中,负重外侧的外螺纹会和空腔内壁的内螺纹进行配合,使负重的收纳方便。
19.可选的,所述空腔内壁开有凹槽,所述负重外侧固定连接有与所述凹槽相配合的凸起。
20.通过采用上述技术方案,当负重需要收纳进空腔时,可以将负重插进空腔中,负重外侧的凸起会卡入空腔内壁的凹槽中,通过凸起与凹槽之间的配合,可以将收纳入空腔的负重固定于空腔中,负重不易掉落,使携带更加方便。
21.可选的,所述负重上固定连接有把手。
22.通过采用上述技术方案,当负重需要收纳至空腔时,手握把手更方便将负重送入空腔,当需要将已收纳至空腔的负重取出时,把手可以提供一个用力点,轻松实现上述操作,使负重的存取更加省力便捷。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.可以降低手横向及纵向的抖动对测量头的影响,使测量装置保持平稳,降低测量误差,方便在手拿仪器时对目标进行水平对准;
25.2.可以将负重收纳于空腔内,便于携带和存放。
附图说明
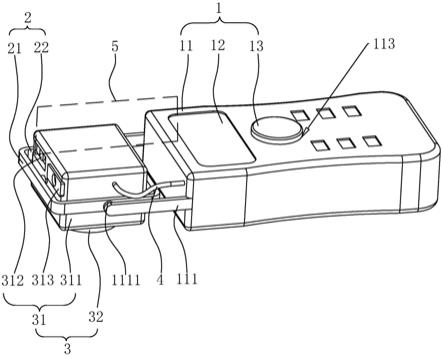
26.图1是本技术实施例1的整体结构示意图。
27.图2是本技术实施例1的第一轴承、第一轴套和第一轴杆爆炸示意图。
28.图3是本技术实施例1的第二轴承、第二轴套和第二轴杆示意图。
29.图4是本技术实施例2的整体结构示意图。
30.图5是本技术实施例2的第三轴承、第三轴套和第三轴杆爆炸示意图。
31.图6是本技术实施例2的第四轴承、第四轴套和第四轴杆的示意图。
32.图7是本技术实施例3的整体结构示意图。
33.附图标记说明:1、按键手柄;11、第一壳体;111、连接杆; 1111、第一轴套;1112、第一轴承;112、第三轴套;1121、第三轴承;113、键孔;12、显示屏;13、按键;2、连接环;21、长杆;211、第二轴套;2111、第二轴承;212、第三轴杆;22、短杆;221、第一轴杆;222、第四轴套;2221、第四轴承;3、测量装置;31、测量头;311、第二壳体;3111、第四轴杆;312、激光发射器;313、接收器;314、空腔;3141、内螺纹;3142、凹槽;315、第二轴杆;32、负重;321、外螺纹;322、凸起;33、连接绳;34、把手;4、导线;5、参照面。
具体实施方式
34.以下结合附图1
‑
7对本技术作进一步详细说明。
35.本技术实施例公开了一种防抖动的手持式激光测距仪。
36.实施例1
37.参照图1,一种防抖动的手持式激光测距仪包括按键手柄1、连接环2、测量装置3和
导线4。
38.参照图1,按键手柄1包括第一壳体11、显示屏12和按键13,显示屏12通过螺钉固定于第一壳体11上表面,第一壳体11上开有多个键孔113,按键13与键孔113间隙配合;按键手柄1上设置有两根连接杆111,两根连接杆111平行,连接杆111一端溶剂黏接于第一壳体11上、另一端延伸至第一壳体11外侧。设有一参照面5,两个连接杆111以参照面5为对称面对称设于参照面5两侧。
39.参照图1,测量装置3包括测量头31与负重32,按键13与显示屏12均与测量头31通过导线4电性连接。负重32为圆柱体铁块,负重32与测量头31下壁通过螺丝固定连接,负重32的重量大于测量头31的重量,测量头31包括第二壳体311、激光发射器312与接收器313,激光发射器312与接收器313位于第二壳体311远离按键手柄1的面上且在连接环2的上方。
40.参照图1,连接环2包括两个长杆21和两个短杆22,两个长杆21和两个短杆22焊接围成矩形框状,两个长杆21中点的连接线与参照面5重合。
41.参照图1和图2,两个短杆22远离参照面5的一侧均溶剂黏接有第一轴杆221,第一轴杆221的转动轴线与参照面5垂直,连接杆111靠近参照面5的一侧溶剂黏接有第一轴套1111,第一轴杆221和第一轴套1111通过第一轴承1112同轴转动连接,第一轴承1112的外壁与第一轴套1111内壁过盈配合,第一轴杆221的外壁与第一轴承1112的内壁过盈配合。
42.参照图1和图3,两长杆21靠近测量装置3的一侧均溶剂黏接有第二轴套211,测量头31外壁溶剂黏接有两个第二轴杆315,第二轴杆315的转动轴线与参照面5重合,第二轴套211和第二轴杆315通过第二轴承2111同轴转动连接,第二轴杆315外壁与第二轴承2111内壁过盈配合,第二轴承2111外壁与第二轴套211内壁过盈配合。第一轴杆221和第二轴杆315的转动轴线位于同一水平面上且相互垂直,测量装置3的重心位于第一轴杆轴线和第二轴杆轴线交点的正下方。
43.实施例1的实施原理为:当手持使用测距仪时,按动按键13,激光发射器312向目标射出一束激光束,由接收器313接收目标反射的激光束,测定激光束从发射到接收的时间,计算出从观测者到目标的距离。连接杆111与连接环2之间的相对转动可以减轻手纵向抖动给测量结果带来的影响,连接环2与测量头31之间的相对转动可以减轻手横向抖动给测量结果带来的影响,测量头31下方的负重32可以降低测量装置3的重心,确保测量头31保持水平不会轻易晃动,降低测量误差。
44.实施例2
45.参照图4和图5,本实施例与实施例1的不同之处在于,第一壳体11与连接环2的连接方式不同、第二壳体311与连接环2的连接方式不同、测量装置3的构成不同、负重32与测量头31的连接方式不同。
46.参照图4和图5,第一壳体11靠近连接环2的一端溶剂黏接有第三轴套112,第三轴套112的转动轴线与参照面5重合,靠近第一壳体11的长杆21上设置有第三轴杆212,第三轴杆212溶剂黏接于长杆21靠近第一壳体11的面上,第三轴杆212与第三轴套112通过第三轴承1121同轴转动连接,第三轴杆212外壁与第三轴承1121内壁过盈配合,第三轴套112内壁与第三轴承1121外壁过盈配合。
47.参照图5和图6,两短杆22靠近测量装置3的一侧均溶剂黏接有第四轴套222,第二壳体311远离参照面5的两侧均溶剂黏接有第四轴杆3111,第四轴杆3111的转动轴线与参照
面5垂直,第四轴杆3111与第四轴套222通过第四轴承2221同轴转动连接,第四轴杆3111外壁与第四轴承2221内壁过盈配合,第四轴套222内壁与第四轴承2221外壁过盈配合。
48.参照图4和图5,测量装置3还包括连接绳33和把手34,第二壳体311下壁开有圆柱型的空腔314,空腔314内壁开有内螺纹3141,负重32外壁开有外螺纹321,空腔314内壁的内螺纹3141与负重32外壁的外螺纹321相配合;负重32通过连接绳33吊挂于测量头31下方,连接绳33的一端与空腔314上端面粘接固定,连接绳33的另一端与负重32上表面粘结固定;把手34焊接于负重32下表面。
49.参照图4和图6,第三轴杆212和第四轴杆3111的转动轴线位于同一水平面上且相互垂直,测量装置3的重心位于第三轴杆212和第四轴杆3111轴杆轴线交点的正下方。
50.实施例2的实施原理为:第三轴套112与第三轴杆212之间的相对转动可以减轻手横向抖动给测量结果带来的影响,第四轴套222与第四轴杆3111之间的相对转动可以减轻手纵向抖动给测量结果带来的影响,测量头31下方吊挂的负重32可以降低测量头31的重心,使测量头31更加平稳,在仪器不使用时,吊挂的负重32和连接线可以收纳进测量头31下部的空腔314中,便于携带的同时可以节省存放空间,手捏把手34顺时针或逆时针转动可以方便实现负重32的存取。
51.实施例3
52.参照图7,本实施例与实施例2的不同之处在于负重32与测量头31的连接方式不同。
53.参照图7,测量头31下部空腔314内壁开有环形的凹槽3142,负重32外侧焊接有环形的凸起322,空腔314内壁的环形的凹槽3142与负重32外侧的环形凸起322可以相互卡接。
54.实施例3的实施原理为:负重32可以通过环形的凸起322与环形的凹槽3142的配合可拆卸连接于测量头31下部空腔314上。
55.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1