一种压力容器损伤检测装置的制作方法
1.本实用新型属于容器检测技术,具体涉及一种压力容器损伤检测装置。
背景技术:
2.目前大型压力容器的无损检测大部分采用人工手持设备进行检测,对于提及较大的大型压力容器,在检测前需要在压力容器内部搭脚手架用于人工攀爬,这样就带来了很多弊端,例如搭脚手架本身是在密闭空间中,在搭脚手架的过程中就存在很大的安全风险,当脚手架搭完后检测人员在脚手架上下爬行,寻找被检测的焊缝依然存在诸多安全风险,而且搭脚手架专门用于无损检测,利用率极低,这样造成了时间的浪费,同时也不经济。
3.大型压力容器内部往往面临着有残留的有毒有害气体或者残留大量粉尘,传统的人工检测对检测人员的身体健康造成了很大的伤害,且残留的粉尘等物质导致密闭空间内部能见度极低,人员无法长时间在容器内部作业,这些都直接制约着检测的结果,导致检测失效,存在很大的安全风险。
技术实现要素:
4.实用新型目的:本实用新型的目的是提供一种压力容器损伤检测装置,解决上述现有技术对于大型压力容器内焊缝检测的不便等问题。
5.技术方案:一种压力容器损伤检测装置,包括升降机构、旋转机构和伸缩机构,所述升降机构的机架上设有升降电机,升降电机通过控制升降杆的伸缩实现旋转机构的升降,所述升降杆安装固定在旋转机构上的安装部,安装部内部设有齿轮轴承,通过齿轮轴承和旋转电机的控制实现旋转机构整体的旋转,所述旋转机构的旋转支架中部设有用于安装伸缩机构的中心杆,伸缩机构通过滑块套装在中心杆上,所述滑块且设置在电动伸缩杆的端部,所述伸缩机构通过连杆之间的交叉连接向两侧延伸,伸缩机构的最外侧通过连杆设有检测杆,所述的检测杆上设有摄像头和红外线探测仪和损伤检测探头,所述的装置首先通过升降机构将旋转机构放置于待检测的压力容器内,然后通过伸缩机构对于压力容器的内壁进行焊缝检测,通过摄像头、红外线探测仪和损伤检测探头采集压力容器的损伤数据。
6.进一步的,本实用新型中所述升降杆为电动或气动或液压杆,且由升降电机驱动。
7.进一步的,所述旋转电机的下方设有控制盒,所述控制盒用于容纳控制旋转电机正反转的控制电路,控制盒且设有电源连接接头,通过连接到外部的电源实现驱动和控制。
8.进一步的,所述旋转支架下部设有一对支撑杆,所述支撑杆的下端部与伸缩机构的连杆的中部交叉点活动连接,支撑杆进一步的提高伸缩机构的稳定性。
9.进一步的,所述检测杆上设有用于防止碰撞的弹性部件。
10.更进一步的,所述装置中的升降电机和电动伸缩杆均由外接电源供电,摄像头、红外线探测仪和损伤检测探头连接有数据线将其采集到的数据信息传输到终端分析设备。优选的,本实用新型所述装置包括设置有电源,包括对摄像头、红外线探测仪和损伤检测探头的电源设置于装置上或检测杆内部,也包括通过无线传输的方式向终端分析设备传输所采
集的数据信息。
11.有益效果:与现有技术相比,本实用新型采用升降机构、旋转机构和伸缩机构三个部分组成,方便组装和拆卸的同时也更大程度的满足不同规格压力容器罐的检测条件,比如增加升降杆的长度实现较深压力容器的检测,通过连杆的组合可以控制伸缩机构向两侧展开的长度,其组装灵活,适用性强。
附图说明
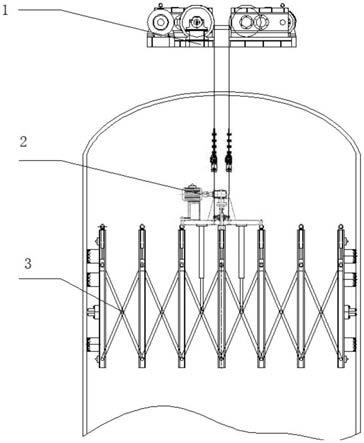
12.图1是本实用新型所述装置检测时分布结构示意图;
13.图2是本实用新型中旋转机构的结构示意图;
14.图3是本实用新型中旋转机构和伸缩结构的组合结构示意图。
15.图中:1、升降机构,2、旋转机构,3、伸缩机构,21、旋转电机,22、控制盒,23、支撑杆,24、旋转支架,25、电动伸缩杆,26、安装部,30、中心杆,31、摄像头,32、红外线探测仪,33、弹性部件,34、损伤检测探头,35、检测杆,36、滑块,37、连杆。
具体实施方式
16.为了详细的说明本发明所述的技术方案,下面结合说明书附图及具体实施例做进一步的阐述。
17.在工业生产制造过程中,对于及粉末状物料或液体或气体出存储一般均会采用一些压力容器,其规格大小不一,为了更好地密封和保证物料的品质,经常需要对该压力容器进行检测检修,目前,多数的还是采用在压力容器排空通风后进行人工检修,但是也会存在一定的物料残留或挥发较慢,具有一定的危害性,其他现有的检测设备也不能无法满足较大压力容器的检测,且实用性不强。
18.本实用新型提供的是一种压力容器无损检测装置,主要包括升降机构1、旋转机构2和伸缩机构3,三个部门在压力容器检测时候的组合分布结构如图1所示。该装置升降机构1可以通过机械手臂设置,也可以云梯等设置,位于压力容器的罐口正上方,升降机构1主要包括升降电机和升降杆,升降杆有升降电机驱动,在实际的应用可以通过升降电机和钢索与旋转机构2连接,如图所示。考虑到钢索等通过悬挂的方式设置旋转机构会存在不稳定的情况,比如说晃动幅度较大等问题,本实用新型优选采用电动升降杆或气动升降杆或液压式,进而更好的控制旋转机构2在压力容器内的位置。旋转机构2通过旋转电机21的控制,在安装部26内部齿轮轴承的配合下实现旋转机构2在压力容器内整体旋转。在旋转机构2的下部为伸缩机构3,用于根据压力容器大小向两侧延伸扩展,靠近压力容器内壁附件实现检测损伤情况,主要检测压力容器内部的焊缝及裂缝情况。
19.结合图2和图3,下面具体的描述本实用新型所述旋转机构2和伸缩机构3的结构。图2所示的旋转机构2的主要构成,主要包括旋转电机21、控制盒22、支撑杆23、旋转支架24、电动伸缩杆25和安装部26。升降机构1采用钢索和旋转机构2连接时,钢索的下端可以固定与旋转支架24的上,可以通过对称设置及增加钢索的数量提高稳定性。对于升降杆为电动、液压及气动伸缩的情况,升降杆的下端部与安装部26连接,在安装部26的内部,设有齿轮轴承,齿轮轴承的定轴连接升降杆,优选螺栓固定,方便拆装,然后外环的齿轮圈与旋转电机21的输出轴咬合,在旋转电机21的控制下,安装部26实现升降杆不动,下部的旋转机构2整
体旋转。在旋转支架24上还设有用于容纳旋转电机21的控制电路及控制设备的控制盒22,该电气设备及控制电路在此不做赘述。本领域技术人员得知,通过控制旋转电机21的正反转实现旋转结构的旋转方向。旋转支架24的下方设有支撑杆24,支撑杆23用于提高伸缩机构3安装的稳定性和牢固程度,在旋转支架24的中心,设有电动伸缩杆25的安装,电动伸缩杆25通过滑块36在中心杆30上的移动控制伸缩机构3的扩展或收缩。
20.图3所示的旋转机构2和伸缩机构3组合安装后的结构示意图,对于伸缩机构3,首先由旋转支架24中心部的中心杆30套装,在中心杆30上设有滑块36,滑块36位于两连杆37的顶部交叉点处,且固定。滑块36沿着中心杆30上下滑动,为了实现收缩,滑块36用于控制,滑块36余电动伸缩杆25的下端部连接,电动伸缩杆25的驱动,使得滑块36的运动,进而带动连杆37运动,实现伸缩机构3伸缩。连杆37的组合数量根据待检测压力容器的规格可以调整。伸缩机构3的两侧最外部位置的连杆37连接有检测杆35。在检测杆35上分布有摄像头31、红外线探测仪32、弹性部件33和损伤检测探头34。需要说明的是弹性部件33的设置避免了检测杆35上的检测设备与压力容器的内部相触碰,造成检测探头和容器的损伤发生,弹性部件33包括橡胶材料制备而成的橡胶球。
21.在本实用新型所述的装置使用过程中,旋转机构2中的旋转支架24可为圆形支架盘,沿中心杆30上可以设置多组连杆37,进而实现伞状的组合扩展,提高提交效率,更快的完成整个压力容器内部的检测。
22.最后,对于本实用新型,该电气及控制电源可由外部提供,包括设置控制电路等,并且通过数据线采集各项检测信息,对于本领人员应得知技术在本实用新型所述装置中的应用不做赘述,应属于本实用新型的其他实施方式。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1