一种地表裂缝监测仪的制作方法
1.本实用新型涉及地质探测设备领域,具体是一种地表裂缝监测仪。
背景技术:
2.地裂缝(surface crack)主要是发生在土层中的裂隙或断层,现有的监测地裂缝一般是采用激光或者超声波进行探测,但是不管是超声波还是激光探测仪,都只能探测地裂缝的宽度、深度等参数,都不能直接探测地裂缝内部的形状,并且如果地裂缝内部倾斜度较大,还会造成超声波或者激光照射在斜坡上回波,不能照射到裂缝的底部,造成参数探测产生误差。
技术实现要素:
3.有鉴于此,本实用新型的目的是提供一种地表裂缝监测仪,能够解决背景技术提出的技术问题。
4.为了实现上述目的,本实用新型采用了如下技术方案:
5.本实用新型的一种地表裂缝监测仪,包括探测主机、行进器、探测器和线缆;
6.行进器包括第一支架、第一驱动电机、第一传动组件和行进轮,驱动电机固定设置在第一支架内部,多个行进轮均匀圆周分布在第一支架的底部,驱动电机通过第一传动组件与行进轮通过传动齿轮传动;
7.探测器包括第二支架、三轴陀螺仪传感器、角位移传感器、探测臂、第二驱动电机和第二传动组件,三轴陀螺仪传感器固定设置在第二支架内部,多个探测臂设置在第二支架的外侧面,探测臂与第二支架转动连接,角位移传感器设置在探测臂与第二支架的转轴上,第二驱动电机通过第二传动组件与探测臂连接并控制探测臂的转动;
8.行进器设置在线缆的末端,探测器设置在线缆的中部,驱动电机、角度位移传感器和三轴陀螺仪传感器均通过线缆内部的导体与探测主机电连接。
9.进一步,所述第一支架的底部设有4个所述行进轮,所述第一传动组件包括第一螺杆和设置在所述行进轮上的轮齿,第一螺杆与所述第一驱动电机的转轴同轴线地固定连接,第一螺杆与所有的行进轮上的轮齿啮合连接。
10.进一步,所述第二传动机构包括第二螺杆和半齿轮,半齿轮与所述探测臂的一端一体成型,第二螺杆与所述第二驱动电机的转轴同轴线地固定连接,第二螺杆与所有的半齿轮啮合连接。
11.进一步,所述第二支架的外侧设有四个所述探测臂,四个所述探测臂成呈长方形的对角线分布。
12.进一步,所述线缆的侧面包裹有编织线材。
13.进一步,所述行进器上还设有超声波探头,超声波探头通过所述线缆内部的导体与所述探测主机电连接。
14.本实用新型的有益效果是:本实用新型的一种地表裂缝监测仪,通过探测主机置
于地面上,将行进器和探测器放入地表裂缝中,行进器拖动探测器在裂缝中向下前行,每前进一端距离,探测主机便会控制第二驱动电机,使得多个探测臂转动并展开,通过获得此时探测器的倾斜度、探测臂的转动角和探测臂的长度即可求出改点的裂缝宽度、裂缝走势等参数,上传至探测主机通过多点测试后即可获得裂缝较为准确的形状参数,同时即便是裂缝倾斜度较大,也能通过行进器进行克服。
附图说明
15.为了更清楚地说明本技术实施例的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其它相关的附图:
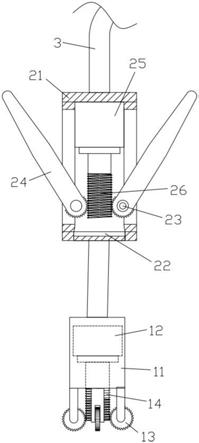
16.图1为本实用新型的行进器和探测器的结构示意图;
17.图2为本实用新型的行进器和探测器的内部结构示意图;
18.附图标记如下:1
‑
行进器、2
‑
探测器、3
‑
线缆、11
‑
第一支架、12
‑
第一驱动电机、13
‑
行进轮、14
‑
第一螺杆、21
‑
第二支架、22
‑
三轴陀螺仪传感器、23
‑
角位移传感器、24
‑
探测臂、25
‑
第二驱动电机、26
‑
第二螺杆。
具体实施方式
19.如图1
‑
图2所示:本实施例的一种地表裂缝监测仪,包括探测主机、行进器1、探测器2和线缆3;
20.行进器1包括第一支架11、第一驱动电机12、第一传动组件和行进轮13,驱动电机固定设置在第一支架11内部,多个行进轮13均匀圆周分布在第一支架11的底部,驱动电机通过第一传动组件与行进轮13通过传动齿轮传动;
21.探测器2包括第二支架21、三轴陀螺仪传感器22、角位移传感器23、探测臂24、第二驱动电机25和第二传动组件,三轴陀螺仪传感器22固定设置在第二支架21内部,多个探测臂24设置在第二支架21的外侧面,探测臂24与第二支架21转动连接,角位移传感器23设置在探测臂24与第二支架21的转轴上,第二驱动电机25通过第二传动组件与探测臂24连接并控制探测臂24的转动;
22.行进器1设置在线缆3的末端,探测器2设置在线缆3的中部,驱动电机、角度位移传感器和三轴陀螺仪传感器22均通过线缆3内部的导体与探测主机电连接。
23.本实用新型的一种地表裂缝监测仪,通过探测主机置于地面上,将行进器1和探测器2放入地表裂缝中,行进器1拖动探测器2在裂缝中向下前行,每前进一端距离,探测主机便会控制第二驱动电机25,使得多个探测臂24转动并展开,通过获得此时探测器2的倾斜度、探测臂24的转动角和探测臂24的长度即可求出改点的裂缝宽度、裂缝走势等参数,上传至探测主机通过多点测试后即可获得裂缝较为准确的形状参数,同时即便是裂缝倾斜度较大,也能通过行进器1进行克服。
24.本实施例中,第一支架11的底部设有4个行进轮13,第一传动组件包括第一螺杆14和设置在行进轮13上的轮齿,第一螺杆14与第一驱动电机12的转轴同轴线地固定连接,第一螺杆14与所有的行进轮13上的轮齿啮合连接,具体地,探测一开始,裂缝的宽度较大,可
直接利用重力前进,但是如果遇到倾斜度较大的缝隙时,4个行进轮13均匀轴对称设置,可以确保行进器1任何一个位置与裂缝的侧壁接触时,均能进行有效前进,从而拖动探测器2进入至裂缝内部,直至裂缝宽度过窄无法前进,此时通过探测主机翻转第一驱动电机12,即可将卡住的进行器退出,从而进行收线。
25.本实施例中,第二传动机构包括第二螺杆26和半齿轮,半齿轮与探测臂24的一端一体成型,第二螺杆26与第二驱动电机25的转轴同轴线地固定连接,第二螺杆26与所有的半齿轮啮合连接,通过螺杆齿轮传动,使得所有的探测臂24能够像雨伞一样同时展开或者同时收起,每个探测臂24的转动角基本一致,便于计算。
26.本实施例中,第二支架21的外侧设有四个探测臂24,四个探测臂24成呈长方形的对角线分布,从而使得夹角为钝角的两个探测臂24能够贴合裂缝面,避免下坠时探测器2转动,使得探测臂24相位变化,造成计算结果错位。
27.本实施例中,线缆3的侧面包裹有编织线材,编织线材更加强韧,避免线缆3被裂缝内凸起的岩石割断后,探测器2和行进器1无法回收。
28.本实施例中,行进器1上还设有超声波探头,超声波探头通过线缆3内部的导体与探测主机电连接,本方案中,还可以将超声波探头安装在行进器1内,使得行进器1克服倾斜裂缝后,再使用超声波探测裂缝的更深处。
29.具体实施过程如下:
30.(1)将探测主机放置在地面上,使用绕线器缓缓将行进器1和探测器2放入至裂缝中,一开始裂缝较宽时,不用启动第一驱动电机12,利用重力将行进器1和探测器2放入,直至无法利用重力前进后,开启第一驱动电机12,行进器1工作并拖动探测器2前行;
31.(2)每前进一段距离后便开启第二驱动电机25,使得探测臂24展开至无法再展开位置,排除重力的情况下,多个探测臂24受力一致,探测器2的轴线大致与此时裂缝的走势轴线一致,记录探测器2与水平面的夹角α,探测臂24的转动角度β,通过探测臂24的自身长度l,通过简单的三角函数即可求得此点裂缝宽度d=2lsinβcos(γ/2),γ为探测臂24之间的夹角,探测器2的倾斜角大致等于裂缝走势的倾斜角(重力会影响探测器2的姿态,实际运用时可以通过多次实验取偏移量去除重力影响);
32.(3)多次探测后,便可以利用电脑和参数模拟出裂缝的走势和内部的具体形状。
33.最后说明的是,以上实施例仅用以说明本实用新型的技术方案而非限制,尽管参照较佳实施例对本实用新型进行了详细说明,本领域的普通技术人员应当理解,可以对本实用新型的技术方案进行修改或者等同替换,而不脱离本实用新型技术方案的宗旨和范围,其均应涵盖在本实用新型的权利要求范围当中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1