模块化的三维可调探测器拼接结构
1.本专利涉及一种模块化的探测器拼接结构和三维位置精度可调方法,具体是应用于超大规模焦平面阵列探测器封装集成的场合。
背景技术:
2.在空间天文领域,开展大口径可见与红外波段超高分辨率空间望远镜的研究进入广域巡天时代,在对地观测领域,气象、海洋、资源、环境与灾害监测预报等领域需求红外探测技术必须具备大规模、多波段、高灵敏、高空间分辨率等特点。焦平面探测器是决定系统技术指标的核心组部件之一,其规模大小将直接影响图像的分辨率,发展更大规模的焦平面封装技术是空间天文和对地观测等领域未来一段时间的热点之一。为了实现大规模、高空间分辨率、高光谱分辨率的要求,可以通过多模块拼接集成来实现,王小坤等报道了一种多模块面阵红外探测器三维拼接结构及实现方法,申请号:201310325013.1,每一个探测器设计了独立安装基板,通过外部引入调节工装实现模块的三维位置精度调节,最后用胶固定,但该结构没有实现电学引出、导冷和机械结构的模块化设计,模块替换性不足,规模扩展困难,同时操作等待时间长,工艺效率较低。
技术实现要素:
3.本专利目的在于提供适一种模块三维位置精度可调、可扩展、方便替换的焦平面模块拼接方法,用于实现超大规模焦平面阵列探测器封装,适用于可见、红外等多模块探测器的封装,尤其适用于低温封装和对探测器平面度要求高的场合。
4.本专利中出现的“上”、“下”、“侧视”、“俯视”、“底视”等方位用词,均为表达方便使用,任何按本专利思路进行的连接关系叙述均属本专利的保护范围。
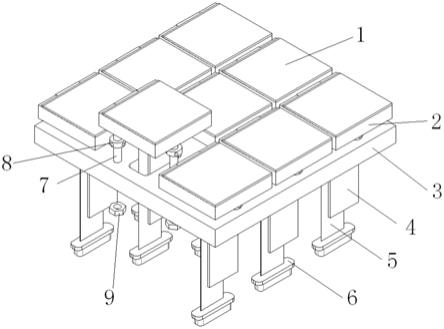
5.一种模块化的三维可调探测器拼接结构,包括探测器模块1、模块基板2、安装基板3、冷链4、柔性电缆5、接插件6、连接杆7、调节垫片8、锁紧螺母9。所述的拼接结构中包含2个或2个以上的探测器模块1,探测器模块1 的排列方式为n
×
m的阵列排布,n为一行探测器模块1的个数,m为一列探测器模块1的个数,每一个探测器模块1通过环氧胶独立安装在一块模块基板 2上表面,每一块模块基板2下方安装有3~4根连接杆7,每根连接杆7先穿过调节垫片8的中心圆孔8
‑
1,再穿过安装基板3上的安装孔3
‑
1后用锁紧螺母9固定;柔性电缆5的一端弯折成“c”字形固定在模块基板2的一侧,并与探测器模块1实现电连接,柔性电缆5的另一端穿过安装基板3上的通孔3
‑
2 与接插件6电连接;冷链4的一端固定在模块基板2的背面的冷链螺纹孔2
‑
3 上,另一端穿过安装基板3上的通孔3
‑
2。
6.所述的模块基板2的上表面平整,模块基板2的下表面靠边框附近分散分布有3~4个连杆螺纹孔2
‑
1,每个连杆螺纹孔2
‑
1旁边靠边框侧设有支撑凸点 2
‑
2,模块基板2的下表面靠中间分布有2~4个冷链螺纹孔2
‑
3,用于安装冷链 4。
7.所述的安装基板3上表面平整,安装基板3上设置有与探测器模块1数量一致的通孔3
‑
2,通孔3
‑
2尺寸应大于接插件6的截面尺寸和冷链4的截面尺寸,每个通孔3
‑
2旁边分布
有3~4个安装孔3
‑
1,安装孔3
‑
1内径应略大于连接杆7外径,以便在安装时模块在水平方向可以微量调整,安装孔3
‑
1的数量和位置与连接杆7一致。
8.所述的调节垫片8为不等厚连续可调结构,中间设置有中心圆孔8
‑
1,中心圆孔8
‑
1内径与连接杆7外径紧配合设计,侧面等间距设置有2~8个调节孔 8
‑
2。模块基板2上的支撑凸点2
‑
2与调节垫片8接触,通过旋转调节垫片8 可以实现该支撑点高度位置的调节。
9.本专利的一种模块化的三维可调探测器拼接结构有以下三个特点:一是采用模块化设计,每个探测器模块安装有独立的模块基板、冷链和电缆,模块筛选测试方便;二是该结构可以实现模块三维位置精度控制,通过预留安装孔间隙实现模块的水平位置调节,通过旋转不等厚连续可调垫片可以实现模块平面度控制;三是该结构模块替换方便,在大规模组件集成时,经常发现在装配过程中或后期应用时出现个别模块损坏的现象,该结构最终固定采用螺接,拆除、替换方便且不影响其他模块。
附图说明
10.图1是组件整体效果图。
11.图2是模块基板图,其中:(1)部分为底视图,(2)部分为侧视图。
12.图3是安装基板俯视图。
13.图4是调节垫片图,其中:(1)部分为效果图,(2)部分为侧视图。
14.1探测器模块、2模块基板、3安装基板、4冷链、5柔性电缆、6接插件、 7连接杆、8调节垫片、9锁紧螺母、2
‑
1连杆螺纹孔、2
‑
2支撑凸点、2
‑
3冷链螺纹孔、3
‑
1安装孔、3
‑
2通孔、8
‑
1中心圆孔、8
‑
2调节孔。
具体实施方式:
15.本专利提供的一种模块化的三维可调探测器拼接结构,如图1~图4,包括探测器模块1、模块基板2、安装基板3、冷链4、柔性电缆5、接插件6、连接杆7、调节垫片8、锁紧螺母9。模块基板2的上表面研磨平整,平面度优于5μm,探测器模块1通过环氧胶独立安装在一块模块基板2上表面,模块基板 2的下表面在靠近边框附近分布有3个m4连杆螺纹孔2
‑
1和3个支撑凸点2
‑
2。连接杆7直径为4mm,两头均为螺纹结构,一头与m4连杆螺纹孔2
‑
1螺接。柔性电缆5的一端弯折成“c”字形通过环氧胶固定在模块基板2的一侧,通过金丝球焊与探测器模块1实现电连接,柔性电缆5的另一端连接有接插件6,接插件6截面尺寸为25mm
×
9mm。模块基板2的下表面中间区域设有2个m3 的冷链螺纹孔2
‑
3,冷链4截面尺寸为20
×
3mm,通过2个m3的螺丝与模块基板2连接,这样就形成了1个模块化结构。该实施例中组件规模为3
×
3,安装基板3上表面研磨平整,平面度优于10μm,中间设置有9个通孔3
‑
2,通孔 3
‑
2尺寸为28mm
×
12mm,每个通孔3
‑
2旁边分布有3个安装孔3
‑
1,安装孔3
‑
1 内径为4.5mm,模块安装时在水平方向可以微量调整。先进行1个模块化结构的安装,3根连接杆7先分别穿过3调节垫片8的中心圆孔8
‑
1,再穿过安装基板3上的安装孔3
‑
1装配到安装基板3上,调节垫片8为不等厚结构,最薄处为2mm,最厚处为2.3mm,通过旋转和平移调节垫片8实现模块高度和水平位置的调整,调整结束后调节垫片8用环氧胶与安装基板3固定,然后用锁紧螺母9固定。然后按照上述方法依次进行其他8个模块化结构的安装固定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1