一种双头螺母检测机的制作方法
1.本技术涉及螺母检测设备的领域,尤其是涉及一种双头螺母检测机。
背景技术:
2.螺母是一种常见的紧固件,因具有良好的紧固性和可拆卸性得到广泛的应用。
3.相关技术中,有一种螺母,如图1所示,包括六角块1,六角块1的一侧设置有上安装块2,另一侧设置有下安装块3,上安装块2和下安装块3的外侧壁均设置有外螺纹。
4.在对该类螺母的缺陷检测中,工作人员手动进行螺母各项数据的检测,发明人认为通过手动进行检测效率较低,不利于螺母的生产检测,因此亟需设计一种用于检测该类螺母缺陷的设备。
技术实现要素:
5.为了提高螺母缺陷检测时的效率,本技术提供一种双头螺母检测机。
6.本技术提供的一种双头螺母检测机采用如下的技术方案:
7.一种双头螺母检测机,包括旋转平台,所述旋转平台上设置有用于放置螺母的安装座,所述安装座上开设有供六角块插接的安装槽,所述安装座经所述旋转平台驱动后能够依次位于第一工位、第二工位、第三工位、第四工位和第五工位,还包括与第一工位对应的用于检测螺母内径大小的内径检测装置、与第二工位对应的用于检测上安装块通规的上通规检测装置、与第三工位对应的用于检测上安装块止规的上止规检测装置、与第四工位对应的用于检测下安装块通规的下通规检测装置和与第五工位对应的用于检测下安装块止规的下止规检测装置。
8.通过采用上述技术方案,将待检测的螺母放置于处于第一工位上的安装座内,此时安装槽对六角块进行径向限位,减小安装座在移动的过程中螺母从安装座上掉出的可能性;内径检测装置能对螺母的内径进行检测,以判断螺母内径是否合格,当内径检测装置对螺母检测完成后,转动旋转平台使安装座移动至第二工位进行上安装块的通规检测,当上通规检测装置对螺母检测完成后,转动旋转平台使安装座移动至第三工位进行上安装块的止规检测,当上止规检测装置对螺母检测完成后,转动旋转平台使安装座移动至第四工位进行下安装块的通规检测,当下通规检测装置对螺母检测完成后,转动旋转平台使安装座移动至第五工位进行下安装块的止规检测,该螺母检测机的设置提高了工作人员对螺母缺陷进行检测时的效率。
9.可选的,所述内径检测装置包括第一固定架、灯光板和摄像头,所述灯光板连接于第一固定架上且处于旋转平台的下方,所述摄像头连接于第一固定架上且处于旋转平台的上方,所述摄像头与所述灯光板相对设置,所述摄像头的输出端电连接于外部计算机。
10.通过采用上述技术方案,当螺母所在的安装座处于第一工位时,旋转平台下方的灯光板对螺母进行照射,使灯光板的灯光从螺母的内径射出并被摄像头所采集到,摄像头将所采集的图像传输到外部计算机中进行分析,从而判断螺母的内径是否合格。
11.可选的,所述上通规检测装置包括上通规头和用于驱动上通规头移动并转动的第一驱动机构,所述上止规检测装置包括上止规头和用于驱动上止规头移动并转动的第二驱动机构,所述下通规检测装置包括下通规头、用于驱动下通规头移动并转动的第三驱动机构和用于抵紧上安装块的第一锁定机构,所述下止规检测装置包括下止规头、用于驱动下止规头移动并转动的第四驱动机构和用于抵紧上安装块的第二锁定机构。
12.通过采用上述技术方案,在上安装块的通规检测过程中,第一驱动机构驱动上通规头与上安装块进行配合,若上通规头能完全与上安装块螺纹配合,则上安装块通规合格,反之不合格;在上安装块的止规检测过程中,第二驱动机构驱动上止规头与上安装块进行配合,若上通规头与上安装块螺纹连接的圈数大于规定的圈数,则上安装块止规不合格,反之合格;在下安装块的通规检测过程中,第三驱动机构驱动下通规头与下安装块进行配合,此时第一锁定机构抵紧上安装块以减小螺母被顶起的情况发生,此时若下通规头能完全与下安装块螺纹配合,则下安装块通规合格,反之不合格;在下安装块的止规检测过程中,第四驱动机构驱动下止规头与下安装块进行配合,此时第二锁定机构抵紧上安装块以减小螺母被顶起的情况发生,若下通规头与下安装块螺纹连接的圈数大于规定的圈数,则下安装块止规不合格,反之合格。
13.可选的,所述第一驱动机构包括第二固定架,所述第二固定架上设置有第一气缸,所述第一气缸的活塞杆上设置有移动板,所述移动板上设置有驱动电机,所述第一气缸的活塞杆和所述驱动电机的输出轴同向设置且均垂直于旋转平台,所述上通规头同轴连接于驱动电机的输出轴上,所述第二固定架上设置有固定块,所述固定块上设置有导向杆,所述导向杆与第一气缸的活塞杆平行设置,所述移动板滑移连接于导向杆上,所述导向杆上设置有连接块,所述连接块上设置有位移传感器,所述位移传感器具有外壳和位移杆,所述位移杆滑移连接于外壳,所述外壳固定连接于连接块,所述位移杆的端部连接于移动板且所述位移杆与导向杆平行设置,所述位移传感器的输出端电连接外部计算机。
14.通过采用上述技术方案,在上通规头对上安装块的通规进行检测时,同时启动第一气缸和驱动电机,第一气缸的活塞杆驱动移动板向下移动,此时驱动电机跟随移动板向下移动且驱动电机的输出轴进行转动,从而使连接于驱动电机输出轴上的上通规头能够旋转着向上安装块靠近,使上通规头能对上安装块的通规进行检测;在移动板的移动过程中,导向杆对移动板径向限位,以减小移动板在向下移动的过程中出现偏移而使上通规头无法对上安装块进行配合的情况发生;在移动板移动的过程中带动位移杆进行移动,使位移杆与外壳发现相对位移,此时位移杆移动的距离通过位移传感器的输出端传输到外部计算机中,通过位移杆移动的距离对上通规头与上安装块螺纹连接的程度进行判断,从而能够快速判断出上安装块是否满足通规合格的要求。
15.可选的,所述安装座还具有上料工位、废料工位和成品工位,所述上料工位位于第一工位的前侧用于待检测螺母的存放,所述废料工位处于第五工位的后侧用于缺陷螺母的存放,所述成品工位处于废料工位的后侧用于合格螺母的存放。
16.通过采用上述技术方案,上料工位的设置便于待检测螺母的存放,使内径检测完毕的螺母移动至第二工位时,待检测的螺母能移动至第一工位进行检测,以减小内径检测装置等待螺母进行检测的时间,提高了作业效率;废料工位和成品工位的设置便于对螺母进行划分,使工作人员能够对有缺陷的螺母进行处理。
17.可选的,还包括与上料工位对应的用于输送待检测螺母的第一传送带和将第一传送带上的螺母运输至上料工位的第一运输机构。
18.通过采用上述技术方案,第一传送带的设置能够将螺母有序的运输至靠近上料工位的位置,此时利用第一运输机构能够将第一传送带上的螺母移动至上料工位上的安装座中,以实现待检测的螺母移动至旋转平台上进行检查。
19.可选的,还包括与废料工位对应的用于处理缺陷螺母的废料导轨和将废料工位上的缺陷螺母运输至废料导轨上的第二运输机构。
20.通过采用上述技术方案,第二运输机构能够将处于废料工位的带有缺陷的螺母从旋转平台上取出并移动至废料导轨上,使带缺陷的螺母能够从废料导轨中排出进行收集,以便于工作人员对带缺陷的螺母进行集中处理。
21.可选的,还包括与成品工位对应的用于运输合格螺母的第二传送带和将成品工位上的合格螺母运输至第二传送带上的第三运输机构。
22.通过采用上述技术方案,合格螺母在旋转平台的作用下处于成品工位上,此时第三运输机构能够将合格的螺母从旋转平台上取出并移动至第二传送带上,合格的螺母随着第二传送带的移动而进入下一工序。
23.可选的,所述第一输送机构包括第三固定架,所述第三固定架上设置有第二气缸,所述第二气缸的端部设置有驱动块,所述驱动块上连接有夹持运输机构,所述夹持运输机构包括直线滑轨、沿直线滑轨长度方向滑移的滑块、设置于直线滑轨长度方向一侧的第三气缸、连接于滑块的固定板、设置于固定板上用于夹持螺母的夹持件和设置于直线滑轨远离第三气缸一侧的行程开关,所述驱动块与直线滑轨连接,所述第三气缸的活塞杆沿直线滑轨的长度方向设置,所述固定板的侧壁连接于第三气缸活塞杆上,所述第二气缸的活塞杆和所述夹持件的夹持部均朝下设置,当所述固定板抵触所述行程开关时,所述第三气缸活塞杆停止移动。
24.通过采用上述技术方案,利用夹持件能够将螺母进行夹紧,此时启动第二气缸使第二气缸的活塞杆收回,夹持运输机构在第二气缸的作用下向上移动,此时螺母跟随夹持件向上移动而离开第一传送带,此时启动第三气缸,第三气缸的活塞杆伸长挤压夹持件侧壁,使夹持件沿着直线滑轨的长度方向向行程开关方向移动,当夹持件抵触行程开关时,第三气缸停止运动,此时螺母能够处于上料工位上的安装座的上方,继续启动第二气缸使第二气缸的活塞杆伸长,第二气缸的活塞杆驱使夹持运输机构向下移动,从而使螺母能够安装到安装座内,实现螺母从第一传送带移动至上料工位上。
25.综上所述,本技术包括以下至少一种有益技术效果:
26.1.旋转平台与各个检测装置的配合能够对螺母进行快速的检测,以提高螺母缺陷检测时的效率;
27.2.位移传感器的设置使检测头与螺母配合的情况能够通过位移杆的移动距离进行判断,以快速判断出螺母通规止规是否合格;
28.3.行程开关的设置能够使夹持件在直线滑轨上移动时总能移动至安装座的上方,以便于螺母安放在安装座上。
附图说明
29.图1是相关技术中的螺母的结构示意图;
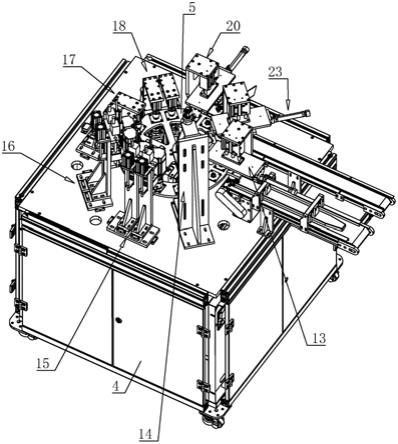
30.图2是本技术实施例的双头螺母检测机的结构示意图;
31.图3是本技术实施例的安装座的结构示意图;
32.图4是本技术实施例的第一运输机构和第一传送带的结构示意图;
33.图5是本技术实施例的第一运输机构的结构示意图;
34.图6是本技术实施例的内径检测装置的结构示意图;
35.图7是本技术实施例的上通规检测装置的结构示意图;
36.图8是本技术实施例的上止规检测装置的结构示意图;
37.图9是本技术实施例的下通规检测装置的结构示意图;
38.图10是本技术实施例的下止规检测装置的结构示意图;
39.图11是本技术实施例的第二运输机构和废料导轨的结构示意图;
40.图12是本技术实施例的第三运输机构和第二传送带的结构示意图。
41.附图标记说明:1、六角块;2、上安装块;3、下安装块;4、机架;5、旋转平台;6、安装座;7、安装槽;8、定位孔;9、第一支撑架;10、第一传送带;11、上料通道;12、挡块;13、第一运输机构;131、第三固定架;132、第二气缸;133、驱动块;134、直线滑轨;135、滑块;136、固定板;137、夹持件;138、第三气缸;139、行程开关;14、内径检测装置;141、第一固定架;142、灯光板;143、摄像头;15、上通规检测装置;151、上通规头;152、第二固定架;153、第一气缸;154、移动板;155、驱动电机;156、导向杆;157、固定块;158、连接块;159、位移传感器;1591、外壳;1592、位移杆;16、上止规检测装置;161、上止规头;17、下通规检测装置;171、下通规头;172、第四气缸;173、第五气缸;174、抵紧块;18、下止规检测装置;181、下止规头;19、废料导轨;20、第二运输机构;21、第二支撑架;22、第二传送带;23、第三运输机构。
具体实施方式
42.以下结合附图2
‑
12对本技术作进一步详细说明。
43.本技术实施例公开一种双头螺母检测机。参照图2和图3,双头螺母检测机包括机架4和旋转平台5,机架4上具有工作平台以供旋转平台5进行放置,旋转平台5通过固定连接于旋转平台5中心的转动电机进行驱动,旋转平台5为透光板,旋转平台5的横截面为圆形且旋转平台5和工作平台相平行。在旋转平台5上通过螺栓安装固定有安装座6,安装座6上表面开设有供螺母的六角块1进行放置的安装槽7,安装槽7的横截面形状大小与六角块1的横截面形状大小相同,安装槽7的底面开设有供下安装块3插接的定位孔8,定位孔8的径向截面形状为圆形且定位孔8的轴线与安装槽7的中心线为同一直线,定位孔8贯穿旋转平台5,当螺母安装到安装座6上时,螺母在旋转平台5转动的过程中相对稳定。通过转动电机的驱动能够使安装座6依次处于上料工位、第一工位、第二工位、第三工位、第四工位、第五工位、废料工位和成品工位。
44.参照图4,在工作平台上通过螺栓固定安装有第一支撑架9,第一支撑架9上有与工作平台相平行的第一传送带10,第一传送带10的上表面与旋转平台5上表面平齐,第一传送带10的下方设置有转动电机,转动电机通过链条驱动第一传送带10进行移动,第一传送带10的端部朝向上料工位的位置。为了提高第一传送带10的上料效率,在第一传送带10的上
表面设置有两条上料通道11,两条上料通道11不连通,第一传送带10靠近上料工位的端部设置有挡块12,使螺母移动至第一传送带10端部后不会继续移动,以实现待上料螺母位置的固定,当前一个螺母从第一传送带10上取下时,后一个螺母会移动至前一个螺母的位置。
45.参照图5,为了使第一传送带10(参见图4)上的螺母能够移动至上料工位上,在工作平台上设置有用于将螺母进行运输的第一运输机构13,第一运输机构13处于第一传送带10边上。第一运输机构13包括第三固定架131,第三固定架131通过螺栓固定安装在工作平台上,第三固定架131的顶部螺栓固定有第二气缸132,第二气缸132的活塞杆向下设置且垂直于工作平台。第二气缸132的活塞杆端部焊接有驱动块133,驱动块133的形状为长方体,在驱动块133上远离远离第二气缸132的一端设置有夹持运输机构。
46.夹持运输机构包括直线滑轨134、滑块135、固定板136、夹持件137、第三气缸138和行程开关139,直线滑轨134连接于驱动块133上远离第二气缸132的一端,且直线滑轨134与工作平台平行设置,直线滑轨134沿长度方向的两端分别处于第一传送带10端部的上方和上料工位的上方。滑块135安装于直线滑轨134上能沿直线滑轨134的长度方向进行移动,固定板136焊接于滑块135上远离第二气缸132的一侧,固定板136与工作平台平行设置,夹持件137通过螺栓固定安装于固定板136且夹持件137的数量为两个,夹持件137的数量与上料通道11的数量相等即可,且夹持件137的位置与上料通道11一一对齐,夹持件137可以为电动夹爪也可以为气动夹爪,夹持件137的抓取部朝下设置用于夹紧螺母。第三气缸138处于直线滑轨134长度方向上远离上料工位的一侧,且第三气缸138的活塞杆沿直线滑轨134的长度方向进行伸缩,第三气缸138的活塞杆端部焊接于固定板136的侧壁。在直线滑轨134上远离第三气缸138的一侧设置有行程开关139,行程开关139的触头与固定板136平齐,行程开关139用于控制第三气缸138的停止,当行程开关139受到挤压时,第三气缸138活塞杆停止移动。
47.需要将第一传送带10上的螺母移动至上料工位时,启动第三气缸138使夹持件137移动至第一传送带10上的螺母上方,此时启动第二气缸132使第二气缸132的活塞杆伸长,夹持件137向螺母靠近,此时驱动夹持件137启动使夹持件137夹紧螺母,重新启动第二气缸132使第二气缸132的活塞杆收缩,此时夹持件137带动螺母离开第一传送带10,再次启动第三气缸138使第三气缸138的活塞杆推动固定板136向行程开关139方向移动,固定板136带动夹持件137向直线滑轨134的另一端移动,当固定板136触碰到行程开关139时第三气缸138的活塞杆停止移动,此时驱动第二气缸132使螺母下移至上料工位上。
48.参照图6,为了检测处于第一工位上的螺母内径大小是否合格,在工作平台上设置有与第一工位相对应的内径检测装置14。内径检测装置14包括第一固定架141、灯光板142和摄像头143,第一固定架141使用螺栓固定安装在工作平台上,灯光板142设置于第一固定架141的下端,灯光板142与旋转平台5(参见图2)相平行且灯光板142处于旋转平台5的下方,灯光板142的灯源朝上设置,灯光板142与第一工位上的安装座6相对应。摄像头143处于第一固定架141的顶部,摄像头143的图像采集端与灯光板142相对设置,摄像头143处于旋转平台5的上方,摄像头143的输出端通过导线连接于外部的计算机上。当螺母移动至第一工位时,灯光板142上的灯光通过螺母内孔被摄像头143所采集到,此时摄像头143能够较为清晰的采集到螺母的内径大小,摄像头143将采集到的图像输出到计算机中进行分析,通过计算机的分析能够快速的判断螺母的内径大小是否合格。
49.参照图7,为了检测上安装块2通规是否合格,在工作平台上设置有两个用于检测上安装块2通规的上通规检测装置15,上通规检测装置15与第二工位相对应,上通规检测装置15的数量与一次性能移动至第二工位的螺母的数量一致即可。上通规检测装置15包括用于检测通规的上通规头151和用于驱动上通规头151进行转动移动的第一驱动机构。第一驱动机构包括第二固定架152、第一气缸153、移动板154、驱动电机155,第二固定架152通过螺栓固定在工作平台上,第一气缸153通过螺栓固定在第二固定架152的顶部,第一气缸153的活塞杆朝下设置且第一气缸153垂直工作平台所处的平面。移动板154与工作平台相平行,移动板154焊接于第一气缸153的活塞杆上,驱动电机155通过螺栓固定安装在移动板154的上表面且驱动电机155的输出轴贯穿移动板154朝下设置,驱动电机155的输出轴与第一气缸153的活塞杆平行设置,上通规头151同轴焊接于驱动电机155的输出轴端部上。使用上通规头151对上安装块2进行检测时,同时启动第一气缸153和驱动电机155,此时第一气缸153的活塞杆伸长使移动板154向下移动,驱动电机155跟随移动板154下移,同时驱动电机155的输出轴带动上通规头151进行转动,使上通规头151能够与上安装块2进行螺纹配合,当上通规头151能够上安装块2完全螺纹配合时,上安装块2通规合格,反之不合格。
50.为了使上通规头151在向下移动的过程中能够与上安装块2进行对齐,第一驱动机构还包括导向杆156和两个固定块157,两个固定块157焊接于第二固定架152的同一侧且两个固定块157平行设置,导向杆156焊接于两个固定块157上且导向杆156与第一气缸153的活塞杆平行设置,移动板154滑移连接于导向杆156上。在移动板154向下移动的过程中,导向杆156限制移动板154的横向移动,以减小移动板154出现偏移的可能性,使上通规头151能够与待检测的上安装块2进行对齐。
51.为了快速判断上安装块2的通规是否合格,第一驱动机构还包括连接块158和位移传感器159,连接块158焊接于导向杆156的顶端,位移传感器159具有外壳1591和位移杆1592,位移杆1592能够相对于外壳1591进行伸缩,外壳1591焊接于连接块158上实现位移传感器159的固定,位移杆1592的端部焊接于移动板154上,且位移杆1592与第一气缸153的活塞杆平行设置,位移传感器159的输出端通过导线连接于外部的计算机中。当上通规头151向下移动与上安装块2进行配合时,位移杆1592跟随移动板154进行移动,上通规头151与上安装块2配合的圈数能够通过位移杆1592移动的距离进行判断,此时位移传感器159将位移杆1592移动的距离传输到计算机中,计算机对位移杆1592移动的距离进行转化分析,以判断上通规头151是否与上安装块2完全配合,从而判断上安装块2通规是否合格。
52.参照图8,为了检测上安装块2止规是否合格,在工作平台上设置有两个用于检测上安装块2止规的上止规检测装置16,上止规检测装置16与第三工位相对应,上止规检测装置16的数量与一次性能移动至第三工位的螺母的数量一致即可。上止规检测装置16包括用于检测止规的上止规头161和用于驱动上止规头161进行转动移动的第二驱动机构,第二驱动机构的部件及部件之间的连接关系与第一驱动机构的部件及部件之间的连接关系完全相同,本处不予赘述。上止规头161与上通规头151最大的区别为两者上用于检测的检测孔孔径不同,上止规头161的检测孔孔径小于上通规头151,若上止规头161与上安装块2配合的圈数大于规定的圈数,则上安装块2止规不合格,反之合格。
53.参照图9,为了检测下安装块3通规是否合格,在工作平台上设置有两个用于检测下安装块3通规的下通规检测装置17,下通规检测装置17与第四工位相对应,下通规检测装
置17的数量与一次性能移动至第四工位的螺母的数量一致即可。下通规检测装置17包括用于检测通规的下通规头171、用于驱动下通规头171进行转动移动的第三驱动机构和用于将上安装块2进行抵紧的第一锁定机构,下通规头171与上通规头151相同,本处不予赘述,第三驱动机构中除气缸连接位置不同外,其余部件及部件之间的连接关系均与第一驱动机构完全相同,且第三驱动机构与第一驱动机构上下位置相反,本处不予赘述。将第三驱动机构中与第一气缸153对应的气缸定义为第四气缸172,第四气缸172通过螺栓固定安装于第二固定架152上,且第四气缸172的活塞杆朝下设置且与驱动电机155的输出轴平行,第四气缸172的活塞杆端部与移动板154焊接。第一锁定机构包括第五气缸173和抵紧块174,第五气缸173通过螺栓固定安装在第二固定架152上,且第五气缸173与驱动电机155相对设置,第五气缸173的活塞杆朝向驱动电机155方向,第五气缸173活塞杆轴线与驱动电机155的轴线为同一直线,抵紧块174焊接于第五气缸173的活塞杆端部。在下通规头171对下安装块3进行通规检测时,启动第五气缸173使抵紧块174与上安装块2抵接,减小下安装块3在通规检测的过程中使螺母从安装座6上掉出的情况发生。
54.参照图10,为了检测下安装块3止规是否合格,在工作平台上设置有两个用于检测下安装块3止规的下止规检测装置18,下止规检测装置18与第五工位相对应,下止规检测装置18的数量与一次性能移动至第五工位的螺母的数量一致即可。下止规检测装置18包括用于检测止规的下止规头181、用于驱动下止规头181进行转动移动的第四驱动机构和用于将上安装块2进行抵紧的第二锁定机构,第四驱动机构的部件及部件之间的连接关系与第三驱动机构的部件及部件之间的连接关系完全相同,第二锁定机构的部件及部件之间的连接关系与第一锁定机构的部件及部件之间的连接关系完全相同,本处均不予赘述。下止规头181与下通规头171最大的区别为两者上用于检测的检测孔孔径不同,下止规头181的检测孔孔径小于下通规头171,若下止规头181与下安装块3配合的圈数大于规定的圈数,则下安装块3止规不合格,反之合格。
55.参照图11,为了能够对不合格的螺母进行处理,在工作平台上设置有倾斜的废料导轨19,废料导轨19与废料工位相对应,废料导轨19的最高端靠近废料工位,在工作平台上还设置有将废料工位上的缺陷螺母移动至废料导轨19上的第二运输机构20,第二运输机构20的结构与第一运输机构13的结构完全相同,本处不予赘述。当带缺陷的螺母移动至废料工位时,驱动第二运输机构20将缺陷螺母移动至废料导轨19上,缺陷螺母沿着废料导轨19的倾斜方向进行移动,使缺陷螺母能够进行收集处理。
56.参照图12,当螺母检测全部完成后且合格时,为了将合格的螺母移出进行处理,在工作平台上设置有第二支撑架21,第二支撑架21上设置有与工作平台相平行的第二传送带22,第二传送带22的上表面与旋转平台5上表面平齐,第二传送带22的下方设置有转动电机,转动电机通过链条驱动第二传送带22进行移动,第二传送带22的一端端部朝向成品工位的位置。在工作平台上还设置有用于将螺母从旋转平台5上移到第二传送带22的第三运输机构23,第三运输机构23的结构和第一运输机构13相同,本处不予赘述。当螺母移动至成品工位上时,驱动第三运输机构23使螺母移动至第二传送带22上,此时螺母跟随第二传送带22移动至下一工序中。
57.本技术实施例一种双头螺母检测机的实施原理为:将待检测的螺母放置在第一传送带10上,螺母沿着上料通道11移动至挡块12处进行位置的固定,驱动第一运输机构13将
螺母移动至上料工位上,此时转动旋转平台5使螺母移动至第一工位,第一工位的内径检测装置14对螺母的内径大小进行检测并将结果传输至外部计算机中,当内径检测完成后,转动旋转平台5使螺母依次转动至第二工位、第三工位、第四工位和第五工位,对上安装块2和下安装块3的通规止规依次进行检测,若检测的螺母存在缺陷,则当螺母移动至废料工位时,废料工位处的第二运输机构20将螺母从废料工位移动至废料导轨19中进行处理,当检测的螺母各方面均合格时,转动旋转平台5使螺母移动至成品工位,此时驱动第三运输机构23使螺母移动至第二传送带22中,螺母沿着第二传送带22的方向移动至下一工序。
58.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1