一种轴端霍尔速度传感器的制作方法
1.本实用新型涉及一种速度传感器,具体涉及一种轴端霍尔速度传感器。
背景技术:
2.目前,部分地铁的牵引系统速度传感器均采用光电原理的速度传感器,根据车辆段的故障统计,运行3年左右的光电速度传感器故障率高达40%~50%,故障主要集中在电路模块、光断续器等抗振动、冲击较弱的部位。而同车其它轴位抗震性较强的制动系统用的霍尔速度传感器、信号系统用的电涡流速度传感器则故障率较低。由于此部分地铁线路和车辆牵引方式的特殊性,传感器是直接连接在轮轴的端部,列车运行过程中,传动轴既提供转速、又作为传感器承重的支撑,因此安装在轴端的速度传感器承受高强度的振动和冲击,振动和冲击均高于标准要求的最大值(标准最大值:振动30g,冲击100g)。且光电速度传感器存在光的发射与接收,为保证光线可无损的直射,需要保障发光管与接收管之间无遮光体阻挡,因此模块盒无法做到全灌封,高强度振动、冲击给电子器件带来的应力全部由器件的引脚和焊点承受,在长时间的应力作用下很容易导致电子元器件本身及焊点疲劳失效。还由于传感器内部有旋转机构,同样无法实现用胶灌封,为确保传感器内部电路与外壳之间能承受较高的耐压值,模块盒一般采用塑料材质,在强振动环境下,塑料容易老化,极端情况下存在模块盒开裂的情况。而霍尔速度传感器由安装在轴端的测速齿轮和传感器本体两部分组成,由于传感器本体是感应磁场的变化,因此可以与旋转结构分离(即非接触),同时传感器本体可以通过灌封胶把传感器内部进行整体灌封,这样大大提高了传感器结构的稳定性,使得该类传感器的抗震性很优越,实际试验中,60g的振动和200g的冲击不会对传感器本体造成损伤。
3.因此,有必要采用抗震性更强的霍尔速度传感器来替换目前使用的光电速度传感器。但是由于轴端处的安装空间有限,又要求输出信号的通道数量多,进而限制了霍尔速度传感器齿轮的大小,要使其每转输出的脉冲数量满足要求,需要降低测速齿轮的齿间距来增加齿数,而当齿间距过小时,对齿轮的加工要求会大大提高,且齿轮质量会下降。因此,为了降低齿轮的加工难度和保证齿轮的质量,需要一种不过分减小齿间距又能满足齿轮每转一圈所输出的脉冲数量要求的霍尔速度传感器。
技术实现要素:
4.本实用新型针对当前工况恶劣的部分地铁的牵引系统速度传感器需要使用霍尔速度传感器来替换目前使用的光电速度传感器时,由于传感器的安装空间有限,在保证齿轮齿间距的情况下输出的信号频率不能满足使用要求的问题,提出了一种轴端霍尔速度传感器,使输出频率既能满足使用要求,也不会提高齿轮的加工难度,还能保证传感器的质量。
5.本实用新型为解决上述问题所采用的技术手段为:一种轴端霍尔速度传感器,包括壳体、传动轴、齿轮、霍尔元件和电缆,传动轴穿过壳体,一端位于壳体内,另一端与车辆
轴端连接,齿轮设置在传动轴位于壳体内的部分且与传动轴同步转动,霍尔元件设置在齿轮外侧周处,电缆与霍尔元件连通且将霍尔元件的感应信号输出,霍尔元件数量为一组以上,一组包括两个霍尔元件,一组内的两个霍尔元件的感应点之间的连线在齿轮转动方向上的投影距离为(mπ/4) mm,且此两个霍尔元件输出的信号通过异或门成为一路倍频后的信号,其中m为齿轮的模数。
6.进一步地,所述轴端霍尔速度传感器还包括霍尔器件,霍尔器件数量为两个以上的偶数个,其包括封装成整体的一组内的两个霍尔元件,霍尔器件内的两个感应点之间的距离为d,霍尔器件内的两个感应点连线与齿轮转动方向之间的夹角为acos((mπ/4)/d)。
7.进一步地,所述轴端霍尔速度传感器还包括感应组件,感应组件包括封装成整体的两个霍尔器件,每个芯片内的两个感应点连线与齿轮转动方向之间的夹角均为acos((mπ/4)/d)。
8.进一步地,感应组件内两个霍尔器件各自的两个感应点连线之间的中点连线在齿轮转动方向上的投影距离为(n*mπ/2+mπ/8) mm,其中n为自然数。
9.进一步地,齿轮模数为1,一个霍尔器件内两个感应点之间的距离为1.75mm,两个感应点连线与齿轮转动方向之间的夹角为acos((π/4)/1.75)。
10.进一步地,一个感应组件的两个霍尔器件内各自的两个感应点连线之间的中点连线在齿轮转动方向上的投影距离为8.24mm。
11.进一步地,壳体包括安装座、外罩和连接头,齿轮设在安装座内,外罩将安装座的一端封住,连接头设在安装座的侧外周处,感应组件设置在连接头内,电缆从连接头穿过。
12.进一步地,传动轴与车辆轴端连接的一端处设有法兰盘,法兰盘和传动轴组成一体的整体式传动法兰轴,法兰盘与车辆轴端连接。
13.进一步地,齿轮与法兰盘之间的传动轴上设有两个轴承,传动轴通过轴承与安装座连接。
14.进一步地,安装座还连接有限位连杆,限位连杆的一端与车辆转向架连接。
15.本实用新型的有益效果是:
16.1. 本实用新型通过合理设置两个霍尔元件在齿轮外侧周处的位置,使两路频率相同的方波信号之间的相位差为90
o
,从而能够倍频为占空比为50%的方波信号,使输出信号中的高电平和低电平时间都达到最大,以更好地被识别出。
17.2. 本实用新型将两个霍尔器件封装在一个感应组件内,且合理设置两个霍尔器件的感应点之间的距离,使倍频后的两路方波信号的相位差为90
°
,以供识别车辆运行方向使用。
18.3. 本实用新型通过将传动轴设计成带法兰盘的整体式法兰传动轴的结构,通过法兰轴与轴端的固定连接,为整个传感器结构提供承重支撑,提高了法兰传动轴的使用寿命。
19.4. 本实用新型通过设置与转向架固定连接的限位连杆与传感器壳体连接,避免传感器壳体部分与传动轴同步转动,从而实现感应组件的信号感应。
附图说明
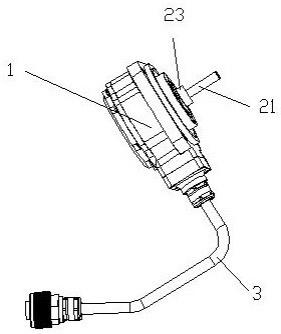
20.图1为实施例一整体结构示意图;
21.图2为实施例一壳体结构示意图;
22.图3为实施例一齿轮和传动轴结构示意图;
23.图4为实施例一单个霍尔器件与齿轮位置示意图;
24.图5为实施例一单路倍频信号原理流程框图;
25.图6为实施例一单个感应组件与齿轮转动方向位置示意图;
26.图7为实施例一两路倍频信号示意图;
27.图8为实施例三霍尔速度传感器整体结构示意图;
28.图9为实施例三霍尔速度传感器法兰传动轴结构示意图;
29.图10为实施例三在传动轴上设置齿轮、轴承和轴承挡板结构示意图;
30.图11为实施例四霍尔速度传感器整体结构示意图;
31.图中:1.壳体,11.安装座,12.外罩,13.连接头,2.法兰传动轴,21.传动轴,22.法兰盘,23.轴承,24.轴承挡板,3.电缆,4.齿轮,5.感应组件,51.霍尔器件,511.霍尔元件,6.异或门,7.比较器,8.限位连杆。
具体实施方式
32.下面结合附图对本实用新型进一步说明。其中,附图仅用于示例性说明,表示的仅是示意图,而非实物图,不能理解为对本专利的限制;为了更好地说明本实用新型的实施例,附图某些部件会有省略、放大或缩小,并不代表实际产品的尺寸;对本领域技术人员来说,附图中某些公知结构及其说明可能省略是可以理解的。
33.由于安装空间有限,进而限制了齿轮4的大小,而为了满足速度传感器的使用要求,齿轮每转一圈所输出的脉冲数不能太低,也即输出信号需要满足一定的频率要求,在列车速度一定、齿轮外径不能增加的情况下,为了保证输出信号的频率,通常需要减小齿轮的齿间距来增加齿轮的齿数,以提高输出信号的频率。但是,齿间距的减小会提高齿轮加工的难度,且会影响齿轮的使用寿命。因此,这一方法不是最佳的首选,而本实用新型采用的结构可行性更高。
34.实施例一
35.一种轴端霍尔速度传感器,如图1和图3所示,包括壳体1、齿轮4、传动轴21、轴承23和电缆3,传动轴21穿过壳体1,一端位于壳体1围成的空间内,另一端与车辆轮轴的轴端连接,齿轮4设在传动轴21位于壳体1内的一端处,电缆3从壳体1的侧周面处穿过。如图2所示,壳体1包括安装座11、外罩12和连接头13。齿轮4位于安装座11内,外罩12将安装座11的一端封住,连接头13位于安装座11的外侧周处,且连接头13内设有霍尔元件511,霍尔元件511位于齿轮4的外侧周处,随着齿轮4的转动接受感应并通过电缆3将信号输出。
36.如图4所示,两个霍尔元件511被封装成一个霍尔器件51,当两个霍尔元件511的感应点之间的距离为d、齿轮模数为m时,两个霍尔元件511的感应点连线与齿轮4转动方向v之间的夹角a为acos((mπ/4)/d),此时,两个霍尔元件511的感应点连线在齿轮4转动方向的投影距离d为(mπ/4) mm。如图5所示,假设两个霍尔元件511输出的信号分别为cha和cha’,此时,cha与cha’之间的相位差为90 o
,然后将cha和cha’通过异或门6后倍频为一路占空比为50%的方波信号outa。而且如图5所示,还可以使异或后的倍频信号outa与基准电压通过比较器7进行比较后输出,以抑制干扰,增加输出信号的驱动能力。至此,得到一路倍频后的信
号。
37.如图6所示,两个相同结构的霍尔器件51封装成一个感应组件5,在此感应组件5内,每个霍尔器件51内两个霍尔元件511的感应点之间的连线与齿轮4转动方向v之间的夹角a均为acos((mπ/4)/d),两个霍尔器件51内各自的感应点连线l1和l2之间的中点连线在齿轮4转动方向上的投影距离d’为(n*mπ/2+mπ/8) mm,其中n为自然数,假设一个霍尔器件51内的两个霍尔元件511输出的方波信号分别为cha和cha’,另一个霍尔器件51内的两个霍尔元件511输出的方波信号分别为chb和chb’,此时,如图6所示,cha与chb之间的相位差为n*180
°
+45
°
,cha’与chb’之间的相位差也为n*180
°
+45
°
,其中n为自然数,cha和cha’倍频后的方波信号outa与chb和chb’倍频后的方波信号outb之间的相位差为90
°
,因而能够作为识别车辆运行方向的信号使用,使输出的信号满足使用要求。
38.实施例二
39.本实施例为上述实施例的具体使用,本实施例中,使用的齿轮4模数为1,也即齿间距为πmm,霍尔器件51内两个霍尔元件511其感应点之间的距离为1.75mm,因此,霍尔器件5在齿轮4外侧周的位置为:霍尔元件511的感应点连线与齿轮4转动方向的夹角为acos((π/4)/1.75),约为63.346
°
,此时,感应点连线在齿轮4转动方向上的投影距离为(π/4) mm,使cha和cha’之间的相位差、chb和chb’之间的相位差均为90
°
。根据壳体1的尺寸以及霍尔器件51的尺寸,选择自然数n为5,也就是将两个霍尔器件51内各自的感应点连线l1和l2之间的中点连线在齿轮4转动方向上的投影距离d’限定为(5π/2+π/8) mm,约为8.24mm,此时,倍频后的方波信号outa和outb之间的相位差为90
°
,形成一对识别车辆运行方向的判断信号。根据使用要求设置感应组件5的数量为三个,三个感应组件5一共输出六通道信号。当然也可以根据需要选取不同的感应组件5的数量。
40.上述实施例中,确定霍尔元件511感应点之间的位置时,忽略了霍尔元件511与齿轮4之间的气隙对感应点连线在齿轮4转动方向v上投影距离的影响,因为此气隙值一般不会太大,如申请人在使用时选取0.8
±
0.3mm的范围,对投影距离的影响比较小,对感应信号的影响更小,因此上述实施例中的方案是可行的。
41.实施例三
42.本实施例是在上述实施例的基础上进行的改进,如图8所示,为了满足传动轴21既传递转速又提供支撑的要求,在传动轴21与轴端连接的一端处设置法兰盘22,形成法兰传动轴2,如图9所示,法兰传动轴1为法兰盘22与传动轴21一体式的整体结构,通过法兰盘22与轴端的连接,大大提高了传动轴2的受力面积,延长了其使用寿命。
43.如图10所示,齿轮4设置在法兰传动轴2远离法兰盘22的一端处,在齿轮4与法兰盘22之间的传动轴21外侧设有轴承23来支撑壳体1,以实现齿轮4与霍尔元件511之间的相对旋转,且轴承23数量为两个,以提高轴承23的承载能力。在轴承23与法兰盘22之间设有轴承挡板24,对轴承23进行保护。如图8所示,轴承挡板24与安装座11用螺钉锁紧后,将壳体1内部与外界分隔开。
44.实施例四
45.如图11所示,本实施例中为了避免霍尔元件511与齿轮4同步转动,在壳体1上设有限位连杆8,限位连杆8的一端固定连接至车辆转向架,另一端处通过螺钉与安装座11连接,从而实现霍尔元件511与齿轮4间的相对旋转,完成信号感应和输出。
46.以上实施例仅供说明本实用新型之用,而非对本实用新型的限制,有关技术领域的技术人员在不脱离本实用新型的精神和范围的情况下,还可以做出各种变化或变换,因此所有等同的技术方案也应该属于本实用新型的保护范围,本实用新型的保护范围应该由各权利要求限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1