一种舵机测试仪的制作方法
1.本实用新型涉及舵机检测技术领域,特别涉及一种舵机测试仪。
背景技术:
2.舵机是一种位置(角度)伺服的驱动器,通过调制脉冲或数字指令控制使其输出轴运动到某种角度的机械装置,适用于那些需要角度不断变化并可以保持的控制系统。
3.目前,在舵机出厂销售前或舵机故障时,需要对舵机进行测试,检验舵机是否正常工作或排除故障。对舵机进行测试的传统方法为:通过传动机构的一端连接舵机输出轴,在传动机构的另一端通过细绳悬挂砝码等重物,舵机输出轴旋转时带动砝码升起,通过是否将砝码拉起来判断舵机是否正常工作;通过连接机械指针并观察指针在刻度盘的位置来识别舵机有在转动角度的准确性。这样的测试方式较粗略,不够准确,无法对舵机输出轴的转速、方向、转动角度等数据做出测试,无法适应测试舵机性能的需求。
技术实现要素:
4.本实用新型所要解决的问题是提供一种舵机测试仪,这种舵机测试仪的测试方式较准确,能够更好地适应测试舵机性能的需求。
5.为了解决上述技术问题,本实用新型采用的技术方案如下:
6.一种舵机测试仪,包括壳体,其特征在于:还包括第一联轴器、第二联轴器、光电编码器、传动轴,以及用于控制传动轴转动速度的刹车装置;所述壳体上部设有用于安装所述舵机的安装孔位;传动轴、刹车装置、光电编码器安装在壳体上,刹车装置与传动轴的位置相对应;第一联轴器安装在传动轴上端,传动轴的下端通过第二联轴器与光电编码器的转轴连接。
7.通常,上述光电编码器是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,这是目前应用最多的传感器;光电编码器是由光栅盘和光电检测装置组成,其中的光电检测装置是由发光二极管等电子元件组成。
8.上述壳体上的安装孔位,可以保证舵机在水平位置上的固定,同时也可以使检测人员快速地插入或拔出舵机,提高工作效率。
9.当将舵机安装到壳体上的安装孔位时,舵机的输出轴通过第一联轴器与传动轴上端连接,光电编码器的转轴通过第二联轴器与的传动轴下端连接,实现光电编码器与舵机同轴连接;当外部电源驱动舵机的输出轴旋转时,通过施加在刹车装置不同电压,产生不同的刹车压力,从而模拟出不同负载的效果,在不同负载下使光电编码器的光栅盘与舵机同速旋转,经发光二极管等电子元件组成的光电检测装置检测输出若干脉冲信号;通过计算每秒光电编码器输出脉冲的个数来反映当前舵机的转速。另外,通过多相脉冲检测方法,可以同时获取舵机的方向和转动角度。
[0010] 这种舵机测试仪利用刹车装置来模拟出不同负载的效果,使得舵机在不同负载下进行舵机方向测定、位置误差、位置保持状态下的舵机抖动误差测定、电位器及线性测
定、电流检测、速度测试等。
[0011]
作为本实用新型的优选方案,所述刹车装置包括刹车座、电磁线圈、第一刹车盘和第二刹车盘,刹车座上设有凹槽,凹槽的中心设有轴孔,所述传动轴处于轴孔中,电磁线圈、第一刹车盘与第二刹车盘依次套设在传动轴上,并且电磁线圈处于凹槽中,第一刹车盘与电磁线圈紧密接触;第二刹车盘沿传动轴作轴向运动,使第二刹车盘与第一刹车盘吸附配合。当有电流通过电磁线圈时,电磁线圈产生电磁力使第一刹车盘与第二刹车盘吸合。当切断电磁线圈上的电流时,电磁线圈没有产生电磁力,使得第一刹车盘与第二刹车盘脱离配合。在使用的时候,使电磁线圈通电,通过向电磁线圈施加不同的电压,使第二刹车盘压向第一刹车盘的压力不同,从而改变第二刹车盘与第一刹车盘之间的摩擦力,利用摩擦力控制传动轴的转速,达到模拟不同负载的效果。
[0012]
作为本实用新型的优选方案,所述壳体包括第一基板、第二基板和第三基板,第一基板、第二基板与第三基板依次平行设置;所述安装孔位设置在第一基板上;第二基板设有第一通孔,所述传动轴穿过第一通孔使所述刹车装置安装在第二基板上;第三基板设有第二通孔,所述光电编码器的转轴穿过第二通孔使光电编码器安装在第三基板上。
[0013]
作为本实用新型的优选方案,所述光电编码器为旋转编码器。上述旋转编码器是用来测量转速并配合pwm技术可以实现快速调速的装置,其中的光电式旋转编码器是通过光电转换,可将旋转编码器的转轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(rep)。通常,上述旋转编码器采用欧姆龙公司的产品。
[0014]
作为本实用新型的优选方案,还包括控制器和控制面板,所述光电编码器的信号输出端与控制器相应的控制输入端电连接,控制面板的信号输入端与控制器相应的控制输出端电连接。利用控制器来获取光电编码器的数据,使光电编码器的数据在控制面板上进行显示。
[0015]
作为本实用新型进一步的优选方案,还包括电流传感器,电流传感器的信号输出端与所述控制器相应的控制输入端电连接。通过电流传感器来检测电流,当检测到电流大于某一数值时,说明舵机已连接到本舵机测试仪。同时,不同负载下的电流数据也作为本舵机测试仪的检测指标。
[0016]
本实用新型与现有技术相比,具有如下优点:
[0017]
这种舵机测试仪的测试方式较准确,实现对舵机输出轴的转速、方向、转动角度、电流等数据做出测试,更好地适应测试舵机性能的需求。
附图说明
[0018]
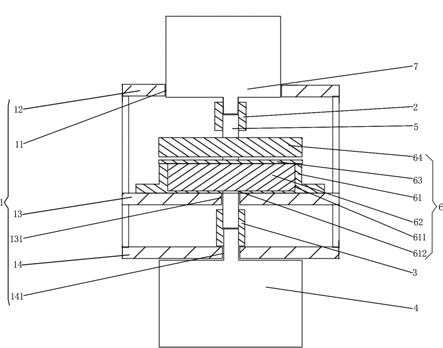
图1是本实用新型具体实施例的结构示意图。
具体实施方式
[0019]
下面结合附图和具体实施例对本实用新型进行具体描述。
[0020]
如图1所示,本实施例中的舵机测试仪,包括壳体1、第一联轴器2、第二联轴器3、光电编码器4、传动轴5,以及用于控制传动轴5转动速度的刹车装置6;壳体1上部设有用于安装舵机7的安装孔位11;传动轴5、刹车装置6、光电编码器4安装在壳体1上,刹车装置6与传动轴5的位置相对应;第一联轴器2安装在传动轴5上端,传动轴5的下端通过第二联轴器3与
光电编码器4的转轴连接。
[0021]
通常,上述光电编码器4是一种通过光电转换将输出轴上的机械几何位移量转换成脉冲或数字量的传感器,这是目前应用最多的传感器;光电编码器4是由光栅盘和光电检测装置组成,其中的光电检测装置是由发光二极管等电子元件组成。
[0022]
上述壳体1上的安装孔位11可以保证舵机7在水平位置上的固定,同时也可以使检测人员快速地插入或拔出舵机7,提高工作效率。
[0023]
刹车装置6包括刹车座61、电磁线圈62、第一刹车盘63和第二刹车盘64,刹车座61上设有凹槽611,凹槽611的中心设有轴孔612,传动轴5处于轴孔612中,电磁线圈62、第一刹车盘63与第二刹车盘64依次套设在传动轴5上,并且电磁线圈62处于凹槽中,第一刹车盘63与电磁线圈62紧密接触;第二刹车盘64沿传动轴5作轴向运动,使第二刹车盘64与第一刹车盘63吸附配合。当有电流通过电磁线圈62时,电磁线圈62产生电磁力使第一刹车盘63与第二刹车盘64吸合。当切断电磁线圈62上的电流时,电磁线圈62没有产生电磁力,使得第一刹车盘63与第二刹车盘64脱离配合。在使用的时候,使电磁线圈62通电,通过向电磁线圈62施加不同的电压,使第二刹车盘64压向第一刹车盘63的压力不同,从而改变第二刹车盘64与第一刹车盘63之间的摩擦力,利用摩擦力控制传动轴5的转速,达到模拟不同负载的效果。
[0024]
壳体1包括第一基板12、第二基板13和第三基板14,第一基板12、第二基板13与第三基板14依次平行设置;所述安装孔位11设置在第一基板12上;第二基板13设有第一通孔131,所述传动轴5穿过第一通孔131使所述刹车装置6安装在第二基板13上;第三基板14设有第二通孔141,所述光电编码器4的转轴穿过第二通孔141使光电编码器4安装在第三基板14上。
[0025]
光电编码器4为旋转编码器。上述旋转编码器是用来测量转速并配合pwm技术可以实现快速调速的装置,其中的光电式旋转编码器是通过光电转换,可将旋转编码器的转轴的角位移、角速度等机械量转换成相应的电脉冲以数字量输出(rep)。通常,上述旋转编码器采用欧姆龙公司的产品。
[0026]
这种舵机测试仪还包括控制器(图中未标示)和控制面板(图中未标示),所述光电编码器4的信号输出端与控制器相应的控制输入端电连接,控制面板的信号输入端与控制器相应的控制输出端电连接。利用控制器来获取光电编码器4的数据,使光电编码器4的数据在控制面板上进行显示。
[0027]
这种舵机测试仪还包括电流传感器(图中未标示),电流传感器的信号输出端与所述控制器相应的控制输入端电连接。通过电流传感器来检测电流,当检测到电流大于某一数值时,说明舵机7已连接到本舵机测试仪。同时,不同负载下的电流数据也作为本舵机测试仪的检测指标。
[0028]
当将舵机7安装到壳体1上的安装孔位11时,舵机7的输出轴通过第一联轴器2与传动轴5上端连接,光电编码器4的转轴通过第二联轴器3与的传动轴5下端连接,实现光电编码器4与舵机7同轴连接;当外部电源驱动舵机7的输出轴旋转时,利用刹车装置6控制传动轴5的转速,通过施加在刹车装置6不同电压,产生不同的刹车压力,从而模拟出不同负载的效果,在不同负载下使光电编码器4的光栅盘与舵机7同速旋转,经发光二极管等电子元件组成的光电检测装置检测输出若干脉冲信号;通过计算每秒光电编码器4输出脉冲的个数来反映当前舵机7的转速。另外,通过多相脉冲检测方法,可以同时获取舵机7的方向和转动
角度。
[0029] 这种舵机测试仪利用刹车装置6来模拟出不同负载的效果,使得舵机7在不同负载下进行舵机方向测定、位置误差、位置保持状态下的舵机抖动误差测定、电位器及线性测定、电流检测、速度测试等。
[0030]
简述这种舵机测试仪在不同负载下的测试方法:
[0031]
对舵机的位置误差测试:在不同负载下,通过不同位置多次控制舵机转动到同一角度的方式获取其反映在光电编码器4上角度的范围。
[0032]
在位置保持状态下的舵机抖动误差测定:在不同负载下,在不改变控制指令的状态下,持续一段时间获取舵机输出轴角度的变化值。
[0033]
对舵机上的电位器及线性测定:通过从最小(或最大)角度指令逐渐向最大(或最小)角度指令变化,测定在光电编码器4上的角度值,计算在各区间上是否成正比或其比值。
[0034]
对舵机的电流检测:在不同负载下,对舵机的电流值进行检测。
[0035]
对舵机的速度测试:在不同负载下,检测舵机输出轴从角度a到角度b的运转时间。
[0036]
此外,需要说明的是,本说明书中所描述的具体实施例,其各部分名称等可以不同,凡依本实用新型专利构思所述的构造、特征及原理所做的等效或简单变化,均包括于本实用新型专利的保护范围内。本实用新型所属技术领域的技术人员可以对所描述的具体实施例做各种各样的修改或补充或采用类似的方式替代,只要不偏离本实用新型的结构或者超越本权利要求书所定义的范围,均应属于本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1