一种旋扭刀片式多点位移计的制作方法
1.本实用新型属于岩土工程与隧道工程监测技术领域,涉及一种多点位移计,尤其是涉及一种旋扭刀片式多点位移计。
背景技术:
2.为掌握软土地区岩土工程和地下工程在施工过程中引发的周围土体变形,需要在地层中钻孔并设置多点位移计来监测岩土体内不同位置的位移。目前已有的多点位移计锚头固定装置主要有注浆式、液压式、弹撑式、倒楔式和叶片式等几种。注浆式会在孔内形成一根连续的锚固体,锚固体共同变形使各点的位移相互干扰,不能测出各点的独立位移,误差极大;液压式、弹撑式、倒楔式锚头在施加锚固力时对孔壁土体扰动较大,破坏了软土原本的土体结构,锚固效果随时间逐渐恶化,使监测数据不理想;叶片式锚头对孔壁土体的扰动虽小,但其锚固力有限,锚固效果不可控,对测量结果产生一定影响。因此,亟需开发适用于软土地层的多点位移计锚头。
技术实现要素:
3.本实用新型的目的在于克服各测点位移相互干扰、锚头对孔壁土体扰动大以及锚固效果不可控等问题,提供一种适用于软土的旋扭刀片式多点位移计,其操作简便、锚固效果可控、可实现各测点位移独立测量的目的。
4.本实用新型的目的可以通过以下技术方案来实现:
5.一种旋扭刀片式多点位移计,包括同心设置在测孔内部的n只空心圆管结构的旋扭传动杆,旋扭传动杆的顶部联接有独立的位移传感器,所述的位移传感器与外部的数据采集仪连接;
6.所述旋扭传动杆的下端设置在测孔内不同深度处,深度较浅的旋扭传动杆的内径大于深度较深的旋扭传动杆的内径;每只旋扭传动杆下端安装有刀片组件,所述的刀片组件包含若干只沿旋扭传动杆周向均布的刀片,并通过旋转旋扭传动杆使得刀片嵌入至测孔周边的软土内,实现测孔内部不同深度处的位移参数测量。
7.上述旋扭刀片式多点位移计中,所述的刀片组件包括自上而下依次设置的固定螺帽、传动盘和刀片导向盘,所述的传动盘的中心开有旋扭杆螺纹孔;所述的旋扭杆螺纹孔上设置有第二内螺纹;第二内螺纹与旋扭传动杆底部设置的第二外螺纹相联接;
8.旋扭杆螺纹孔的外部一周设置有若干只同轴线但不相互贯通的螺纹臂穿孔,传动盘的下部均布安装有若干只逗号形状的刀片,刀片的尾端固定在传动盘设置的旋转轴上,刀片上刻有弧形的刀片导向槽;
9.所述的刀片导向盘上设置有与刀片导向槽)相对应的刀片导向钮,对刀片张开和闭合位置进行限位;
10.刀片导向盘上设置有若干只与螺纹臂穿孔位置相对应的螺纹臂,螺纹臂为筒壁带有间隔凹槽的薄壁圆筒结构,圆筒外圈的顶部设置有第一外螺纹,所述的螺纹臂的弧长小
于螺纹臂穿孔的弧长,螺纹臂穿过对应的螺纹臂穿孔后与固定螺帽的第一内螺纹通过螺纹联接;
11.所述的第一外螺纹和第二外螺纹螺旋方向相反。
12.上述旋扭刀片式多点位移计中,所述的固定螺帽通过限位扳手进行固定,所述的限位扳手一端为长柄,另一端设置有内六方孔,所述的内六方孔与固定螺帽的外圈相匹配。
13.上述旋扭刀片式多点位移计中,在测孔内刀片组件的上部设置有锚固体,所述的锚固体采用锚固剂或水泥凝固而成。
14.上述旋扭刀片式多点位移计中,刀片导向槽为设置在刀片下表面的盲槽结构。
15.上述旋扭刀片式多点位移计中,传动盘的下部均布安装有四只刀片。
16.上述旋扭刀片式多点位移计中,所述传动盘和刀片导向盘直径相等,所述测孔的直径比传动盘的直径大3
‑
5mm。
17.上述旋扭刀片式多点位移计中,n=3
‑
5。
18.与现有技术相比,本实用新型具有以下优点:
19.一、本实用新型针对边坡、基坑、隧道工程等软土地层不同深度处的多点位移测量,提出了一种多点位移的测量方法,通过同心结构的旋转刀片式多锚头位移计实现了不同深度软土中的多点位移测量,实施中针对软土地层内部不同位置处位移的独立监测需求,采用刀片切入的方式进行位置锁定,减少了孔壁岩土体的扰动影响,提高了系统应用的可靠性和稳定性,
20.二、本实用新型设计了结构新颖紧凑的旋转式锚头,实施中将刀片固定在刀片导向盘上,通过旋转传动盘,在刀片导向钮的作用下,使得刀片张开后嵌入至软土内部;该装置结构简单可靠,并可通过限位扳手现场安装。此外刀片的旋出长度可以主动控制,锚固锁定强度可得到有效保证。组件操作简便,锚头安装和拆卸方便,监测期结束,可将锚头依次拆出,达到多次利用的效果。
21.三、本实用新型在锚头安装后,在锚头的上部灌入少量锚固剂,与测孔周边形成锚固体,既可以实现分层锚固,防止各锚头位移信号串扰,还可以增强锚固效果,提高独立测量的精度。
附图说明
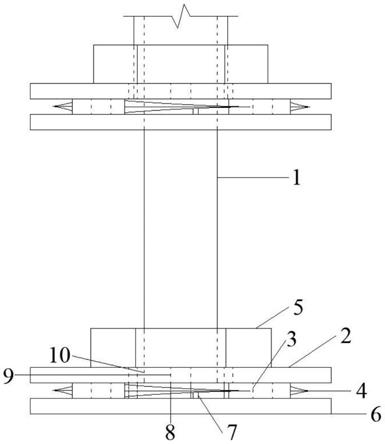
22.图1为本实用新型旋扭刀片式多点位移计工作原理示意图;
23.图2为本实用新型旋扭刀片式位移计锚头整体结构示意图;
24.图3为本实用新型旋扭刀片式位移计锚头各部件分解示意图;
25.图4为本实用新型位移计锚头传动盘结构示意图;
26.图5为本实用新型位移计锚头刀片导向盘结构示意图;
27.图6为本实用新型位移计锚头刀片张开时的结构示意图;
28.图7为本实用新型锚头安装时专用工具限位扳手结构示意图。
29.图中,1
‑
旋扭传动杆,2
‑
传动盘,3
‑
刀片旋转轴,4
‑
刀片,5
‑
固定螺帽,6
‑
刀片导向盘,7
‑
刀片导向钮,8
‑
螺纹臂,9
‑
螺纹臂穿孔,10
‑
旋扭杆螺纹孔,11
‑
刀片导向槽,12
‑
限位扳手,13
‑
位移计基座,14
‑
位移传感器,15
‑
信号传输线,16
‑
数据采集仪,17
‑
测孔,18
‑
刀片组件;19
‑
软土;20
‑
锚固体;21
‑
第一外螺纹21;22
‑
第二外螺纹。
具体实施方式
30.下面结合附图和具体实施例对本实用新型进行详细说明。
31.如图1至图3所示,本实用新型的一种旋扭刀片式多点位移计,包括同心设置在测孔17内部的n只空心圆管结构的旋扭传动杆1,旋扭传动杆1的顶部联接有独立的位移传感器14,所述的位移传感器14与外部的数据采集仪16通过信号传输线15连接,其中n=3~5。
32.旋扭传动杆1的下端设置在测孔内不同深度处,深度较浅的旋扭传动杆1的内径大于深度较深的旋扭传动杆1的内径;每只旋扭传动杆1下端安装有刀片组件18,所述的刀片组件18包含若干只沿旋扭传动杆1周向均布的刀片4,并通过旋转旋扭传动杆1使得刀片4嵌入至测孔17周边的软土19内,实现测孔内部不同深度处的位移参数测量。在测孔17内的刀片组件18的上部设置有锚固体20,锚固体20采用锚固剂或水泥浇筑凝固而成。其中位移传感器14采用传统的钢弦式传感器,通过测量旋扭传动杆1的位移,进而反映位移参数。
33.如图2至图6所示,每只刀片组件包括自上而下依次设置的固定螺帽5、传动盘2和刀片导向盘6,所述的传动盘2的中心开有旋扭杆螺纹孔10;所述的旋扭杆螺纹孔10上设置有第二内螺纹;第二内螺纹与旋扭传动杆1底部设置的第二外螺纹22相联接;
34.旋扭杆螺纹孔10的外部一周设置有若干只同轴线但不相互贯通的螺纹臂穿孔9,图3中为四只。传动盘2的下部均布安装有若干只逗号形状的刀片4,图3中传动盘2的下部均布安装有四只刀片4。刀片4的尾端通过铰链活动固定在传动盘2设置的旋转轴3上,刀片上刻有弧形的刀片导向槽11;所述的刀片导向盘6上设置有与刀片导向槽11相对应的刀片导向钮7,对刀片4张开和闭合位置进行限位;刀片导向槽11为设置在刀片4下表面的盲槽结构,也就是说槽孔开在刀片的底部,但不是通孔;刀片导向盘6上设置有若干只与螺纹臂穿孔9位置相对应的螺纹臂8,螺纹臂8为筒壁带有间隔凹槽的薄壁圆筒结构,圆筒外圈的顶部设置有第一外螺纹21,所述的螺纹臂8的弧长小于螺纹臂穿孔9的弧长,螺纹臂8穿过对应的螺纹臂穿孔9后与固定螺帽5的第一内螺纹通过螺纹联接;旋扭传动杆1通过旋扭杆螺纹孔10与传动盘2连接,刀片4可以在刀片旋转轴3上自由转动。所述的第一外螺纹21和第二外螺纹22螺旋方向相反。
35.具体施工前,需在地面上对旋扭刀片式多点位移计锚头进行提前组装,组装完成后再将锚头依次放入地层里提前钻好的孔中。
36.具体组装顺序如下:首先将刀片导向盘6上的螺纹臂8穿过传动盘2上的螺纹臂穿孔9,此过程中检查刀片4的方位,确保每个刀片4下面的刀片导向槽11卡在刀片导向盘6上的刀片导向钮7上,可在刀片导向槽11里涂抹润滑油来保证刀片4的顺滑运动,然后把固定螺帽5螺在螺纹臂8的螺丝上,螺纹臂8的顶部设置有第一外螺纹21,且螺纹臂8的弧长小于螺纹臂穿孔9的弧长,这样以来,固定螺帽5螺紧后,传动盘2还可以与刀片导向盘6自由的产生相对转动,且传动盘2与刀片导向盘6之间的间距还要保证刀片导向钮7始终位于刀片导向槽11内。最后,把旋扭传动杆1螺紧在旋扭杆螺纹孔10内,旋扭传动杆1可以逐节接长,可以根据设计锚固深度,在放入锚头的过程中逐节接长。为保证传动盘2和刀片导向盘6在相对转动的过程中,螺丝不发生松动,第一外螺纹21和第二外螺纹22螺旋方向相反。
37.具体施工顺序如下:为保证锚头顺利放入到设计深度,传动盘2和刀片导向盘6直径相等,软土地层的测孔17的直径略大于传动盘2的直径,通常大3
‑
5mm。旋扭传动杆1各节通过螺纹连接,单节长度有2m、1.5m和1m的,可根据实际需要来编排长度。锚头组装好后,将
锚头放入钻孔内,在锚头逐渐抵达设计深度的过程中需要借助外力提拉旋扭传动杆1,谨防锚头滑脱落入孔底无法取出,导致施工失败。
38.如图7所示,固定螺帽5通过限位扳手12进行固定,所述的限位扳手12一端为长柄,另一端设置有内六方孔,所述的内六方孔与固定螺帽5的外圈相匹配。限位扳手12也可以逐节接长,当锚头到达设计深度时,将限位扳手12穿过旋扭传动杆1,逐节接长,使其到达固定螺帽5,调整限位扳手12的角度,保证限位扳手12卡住固定螺帽5。用管钳卡住露于孔外的旋扭传动杆1,按照固定螺帽5和旋扭传动杆1螺紧的方向,限位扳手12与管钳反向转动。此时,传动盘2和刀片导向盘6发生相对运动,在刀片导向钮7的作用下,刀片4绕旋转轴3转动,使得刀片4沿着刀片导向槽11旋出刺入软土19中,此时锚头成功锚入软土地层内一定深度,检查锚固效果理想后,取出限位扳手12,开始准备下一个点的安装。还可以在放入下一个锚头前,向孔内灌入少量锚固剂,在刀片组件18的上部形成锚固体20,所述的锚固体20采用水泥或锚固剂凝固而成,这样既可以实现分层锚固,防止各锚头位移信号串扰,还可以增强锚固效果,提高独立测量的精度。孔深较深的锚头固定完毕后再逐个固定孔深较浅的锚头,且各锚头的施工方法相同。
39.锚头安装完毕后,将各锚头的旋扭传动杆1与位移传感器14相连,在孔外设置位移计基座13,将位移计信号传输线15接入数据采集仪16,便可监测软土地层内不同深度的位移。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1