一种采煤机电缆夹拉力采集装置的制作方法
1.本实用新型涉及一种采煤机电缆夹拉力采集装置。
背景技术:
2.随着煤矿智能化开采技术的发展,对采煤机自动化运行提出了更高的要求,采煤机运行的智能调速,是智能化开采一个关键技术。其中,采煤机的安全运行是其智能化、自动化运行的基础。
3.目前,采煤机自动运行,经过调试确定一个比较合适的正常运行速度和加速度即可,然而在实际的运行中,采煤机运行速度除了受到坡度、瞬间煤量、大块煤等多种因素影响外,采煤机拖缆(拖拽电缆)受力经常会影响采煤机的正常运行,过大的拖缆受力有将电缆拽断的风险,因此,如何将采煤机拖缆受力考虑进来是我们亟待解决的问题。
技术实现要素:
4.本实用新型的目的是提出一种采煤机电缆夹拉力采集装置,通过传感器的固定结构可以准确的提供电缆夹的拉力信号,可以实现实时监测采煤机拖缆受力情况,控制采煤机智能加减速,保证采煤机安全智能运行。
5.为了实现上述目的,本实用新型的技术方案是:
6.一种采煤机电缆夹拉力采集装置,包括电缆夹,电缆夹卡住电缆置于电缆槽中,从采煤机伸出的连接板通过拖带链连接电缆夹,采煤机采煤行走时采煤机通过拖带链拽动电缆夹在电缆槽中滑动,其中,在拖带链与采煤机伸出的连接板之间设置有获取拉力的连接臂,所述连接臂包括与连接板连接的回转轴柱,在回转轴柱上可转动的套有回转套拉杆,在回转套拉杆的杆臂上设置有一个透孔,透孔中穿入设置拉力传感器柱轴,拉力传感器柱轴两端从透孔中伸出通过套环连接拖带铰链,行走时,拉力传感器柱轴两端拉动套环使拉力传感器柱轴在透孔中受到反作用力形成电缆夹拉力信号,电缆夹拉力信号从拉力传感器柱轴端部设置的信号接口输出连接信号处理控制板,信号处理控制板与采煤机控制器通讯连接。
7.方案进一步是:所述拖带链是由多个金属环相套通过穿入转轴连接形成的铰链。
8.方案进一步是:所述透孔的孔径与拉力传感器轴柱直径之间的关系是过渡配合关系。
9.方案进一步是:所述套环包括连接杆,连接杆一端与铰链连接,连接杆另一端是一个u字形套臂,u字形套臂的两侧臂分别设置有同心的穿孔,回转套拉杆的杆臂插入u字形套臂的两侧臂之间,两侧臂穿孔套在从回转套拉杆的杆臂透孔中伸出的拉力传感器柱轴两端。
10.本实用新型采煤机电缆夹拉力采集装置通过传感器的固定结构可以准确的提供电缆夹的拉力信号,在回转轴柱上可转动的套有回转套拉杆,以及拖带链为多个金属环相套通过穿入转轴连接形成的铰链既保证了连接强度,又可以自动调节受力方向。
附图说明
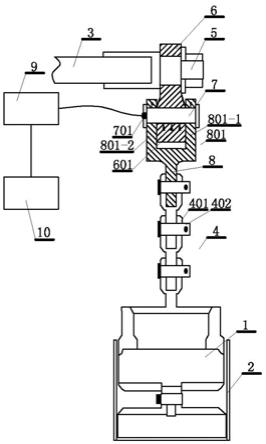
11.图1为本实用新型采煤机电缆夹拉力采集装置结构示意图;
12.图2为本实用新型采煤机运动模型示意图;
13.图3为本实用新型采煤机自动运行控制流程图。
具体实施方式
14.一种采煤机电缆夹拉力采集装置,如图1所示,所述采煤机电缆夹拉力采集装置包括电缆夹1,电缆夹卡住电缆置于电缆槽2中(图中未示出电缆),从采煤机伸出的连接板3通过拖带链4连接电缆夹,为了实现一种柔性连接,所述拖带链4是由多个金属环401依次相套通过穿入转轴402连接形成的铰链。采煤机采煤行走时采煤机通过拖带链拽动电缆夹1在电缆槽7中滑动,其中,在拖带链与采煤机伸出的连接板之间设置有获取拉力的连接臂,所述连接臂包括与连接板3连接的回转轴柱5,在回转轴柱上可转动的套有回转套拉杆6,在回转套拉杆的杆臂601上设置有一个透孔,透孔中穿入设置拉力传感器柱轴7,拉力传感器柱轴两端从透孔中伸出通过套环连接拖带铰链,所述套环包括连接杆8,连接杆一端与铰链4连接,连接杆另一端是一个u字形套臂801,u字形套臂的两侧臂801
‑
1和801
‑
2分别设置有同心的穿孔,回转套拉杆6的杆臂601插入u字形套臂的两侧臂之间,两侧臂穿孔套在从回转套拉杆的杆臂透孔中伸出的拉力传感器柱轴两端,行走时,如图1中的箭头所示,拉力传感器柱轴两端拉动套环产生的作用力使拉力传感器柱轴在透孔中受到反作用力形成电缆夹拉力信号,电缆夹拉力信号从拉力传感器柱轴端部设置的信号接口701输出连接信号处理控制板9,信号处理控制板与采煤机控制器10通讯连接。
15.为了提高准确性,所述透孔的孔径与拉力传感器轴柱直径之间的关系是机械加工装配中的过渡配合尺寸关系。
16.上述实施例,通过传感器的固定结构可以准确的提供电缆夹的拉力信号,在回转轴柱上可转动的套有回转套拉杆,以及拖带链为多个金属环相套通过穿入转轴连接形成的铰链既保证了连接强度,又可以自动调节受力方向。
17.采煤及运行中对于所述采煤机电缆夹拉力采集装置实际应用是:采煤机通过行程传感器控制采煤机行走速度和往复循环的结束和开始,在采煤机自动运行速度控制中考虑拖缆受力,首先,通过拉力机拉紧拖带电缆的电缆夹的预先实验确定电缆拉力警戒值fa;然后通过如图2所示建立的采煤机运动模型建立获取拖带力f(t) 的计算公式1,通过计算公式1在采煤机采煤行走过程中确定所产生的拖带力f(t),其考虑拖缆受力的采煤机自动运行速度控制过程是:在采煤机行走的过程中实时获取拉力传感器的拉力值fs,拉力值fs与拖带力f(t)进行比较,其中:
18.当fs=f(t)且fs<fa时,采煤机行进正常、可以进行加速;
19.当fs>f(t)且fs<fa时,电缆夹有轻度卡阻,采煤机不能加速、保持匀速;
20.当fs>f(t)且fs≥fa时,电缆夹有重度卡阻,采煤机立即停止运行并报警;
21.当fs<f(t)时,电缆夹出现异常、立即停止运行并报警。
22.所述的公式1为:
23.24.其中:
25.m(t)为拖带质量,拖带质量由公式2计算确定;
26.公式2:
[0027] 为电缆的线密度,kg/m;
[0028]
t为从开始时间为起始的行走时间,秒;
[0029]
g 为重力加速度常数,9.81;
[0030] 为采煤机运动工作面倾角;
[0031]
a
0 为采煤机加速运行的加速度;
[0032]
为采煤机正常运行的速度;
[0033]
为电缆夹与电缆槽之间动摩擦系数。
[0034]
关于公式2,其中的l为电缆拖拽的长度,它是与采煤机行走的速度和以开始时间为起始的行走时间t相关联,作为拖拽,采煤机在返回到原始位置时,其电缆长度为“0”,因此,此时的时间t应该为起点、即为“0”,所以每次回到原始起点,时间寄存器清“0”。
[0035]
因此:所述在采煤机采煤行走过程中确定所产生的拖带力f(t)是:在采煤机往复循环中拖带的电缆从原点开始作为时间起始
ꢀ“0”ꢀ
点,随采煤机行进,间隔时间通过公式1获取拖带力f(t),将获取的拖带力f(t)放入预先设置的f(t)寄存器,所述拉力值fs与拖带力f(t)进行比较是所述fs与f(t)寄存器中的f(t)进行比较;其中,所述间隔时间是每间隔1秒通过公式1获取拖带力f(t)。
[0036]
其中:所述拖带力包括匀速拖带力和加速度拖带力;所述匀速拖带力是从加速度a0=0时将公式2代入公式1得出的公式3获得的,
[0037]
公式3:
[0038]
所述加速度拖带力是从加速度a0≠0时将公式2代入公式1得出的公式4获得的,
[0039]
公式4:
[0040]
在采煤机行向前行走的过程中,如图3所示:销轴式拉力传感器柱轴7将对电缆夹的拉力值实时经信号处理控制板9处理后传给安装在采煤机控制系统的采煤机控制器10。采煤机控制器内存有设定好的采煤机运行加速度a0、拉力警戒值fa和拖缆夹拉力计算公式f(t)。采煤机控制器能够以每秒钟数次的速度按照拉力计算公式f(t)计算正常状态下的电缆夹拉力。采煤机控制器以每秒钟数次的频率比较拉力值f(t)、传感器传入的实时拉力值fs与拉力警戒值fa。当采煤机控制系统比较得出:fs=f(t)且fs<fa时,说明拖拽电缆夹运行正常,采煤机可以以加速度a0进行加速。当采煤机控制器比较得出:fs>f(t)且fs<fa时,说明采煤机拖拽电缆夹有卡阻现象,此时采煤机不能加速,待fs=f(t)且fs<fa(卡阻现象解除后),方可加速。当采煤机控制器比较得出:fs>f(t)且fs≥fa时,说明拖拽电缆夹受到了严重的卡阻,应立即停止运行并报警,并将故障代码传给采煤机控制系统。当采煤机控制器比较得出:fs<f(t)时,说明拖拽电缆夹有异常,应立即停止运行并报警,并将故障代码传给采煤机控制系统。采煤机运行到两端头最远端时,安装在此处的行程传感器提供计时清零信号给采煤机控制器,采煤机控制器重新计算下一循环周期。
[0041]
为求得f(t)的计算公式,如图2所示,首先将采煤机拖拽运行的简化为由a、b、c点组成的直角三角形运行物理模型。由于拖拽装置是与采煤机连接,因此拖拽电缆夹的速度和加速度与采煤机的运行速度和加速度相同。我们可以将电缆夹在电缆槽中的运行简化为如图2所示的三角形a
‑
b斜面上物体m的运动模型,为计算出上述f(t)的计算公式1,做如下假设:
[0042]
1、采煤机所运行的采煤工作面倾角为;
[0043]
2、采煤机做匀速运动时,其速度为v,做加速运动时加速度为a0;
[0044]
3、拖拽电缆夹在电缆槽中运行时,电缆夹与电缆夹之间,电缆夹与电缆槽之间的动摩擦系数视为相等,同为;
[0045]
4、电缆夹的线密度为(忽略夹子的重量,只考虑电缆的重量);
[0046]
5、采煤机在工作面做循环周期运行,运行至两端头最远端时,触及行程开关,速度降为0,并即将反向运动的时刻,计时清零。
[0047]
6、在倾角在常见范围内,电缆夹受拖拽牵引而跟随采煤机运动,此时其运动速度v和运动加速度a0与采煤机相同。
[0048]
计算通过实时监测传感器的受力值来控制采煤机是否加速、减速。当采煤机拖拽的供电电缆夹受力小于拉力警戒值时,采煤机控制系统可正常调整采煤机运行速度;当拖拽的供电电缆夹遇到卡滞而拉力继续增大到拉力警戒值时,采煤机控制系统降低采煤机运行速度至低速,并继续监测拉力值是否继续增大;当拖拽的供电电缆夹受到的拉力迅速增大至拉力保护阈值时,采煤机控制系统将停止行走的指令发给采煤机变频器,控制采煤机停机并显示故障信息。
[0049]
上述实施例中,通过传感器的固定结构可以准确的提供电缆夹的拉力信号,在回转轴柱上可转动的套有回转套拉杆,以及拖带链为多个金属环相套通过穿入转轴连接形成的铰链既保证了连接强度,又可以自动调节受力方向,采煤机通过实时监测采煤机拖缆装置受力情况,通过计算比较,判定拖拽的电缆夹运行是否正常,采煤机控制系统根据判断结果执行采煤机的加减速,保证采煤机安全智能运行。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1