异物检测系统的制作方法
1.本技术涉及目标探测技术领域,特别是涉及一种异物检测系统。
背景技术:
2.fod(foreign object debris,机场跑道入侵异物)是可能损伤航空器的某种外来的物质、碎屑或物体的统称。跑道异物直接影响着飞机的飞行安全。
3.目前,国内大部分机场仍然依靠的是人工巡检的方式。但是,随着旅客吞吐量、货邮吞吐量、起降架次的快速增长,国内机场地面资源、空中资源日趋紧张,尤其是繁忙机场时刻资源已供不应求,因此机场fod实时探测需求迫切。
技术实现要素:
4.本技术提供一种异物检测系统,以对待检测环境进行异物检测,本技术的异物检测系统结构简单,能够提高瞬时检测范围,且具有较高的角度分辨率和检测信噪比。
5.为解决上述技术问题,本技术采用的一个技术方案是:提供一种异物检测系统,该异物检测系统包括:多个依次间隔设置的雷达检测点,每个雷达检测点包括mimo雷达,mimo雷达包括两组微带天线阵列,微带天线阵列用于对预设范围内的异物进行实时探测。
6.进一步地,每组微带天线阵列为4发4收的微带天线阵列。
7.进一步地,微带天线阵列的角度分辨率为1
°‑7°
。
8.进一步地,两组微带天线阵列包括第一微带天线阵列和第二微带天线阵列,第一微带天线阵列的覆盖范围为0
°‑
90
°
,第二微带天线阵列的覆盖范围为90
°‑
180
°
,且第一微带天线阵列和第二微带天线阵列之间的夹角范围为0-180
°
。
9.进一步地,雷达检测点还包括信号处理器,信号处理器连接mimo雷达,信号处理器从mimo雷达获取异物的采样数据,并对采样数据进行处理以得到异物的位置信息。
10.进一步地,信号处理器包括依次连接的距离维傅里叶变换模块、非相参积累模块、恒虚警检测模块、距离插值模块和角度估计模块,用于输出异物的位置信息。
11.进一步地,异物的位置信息包括异物相对mimo雷达的距离、角度和mimo雷达的编号。
12.进一步地,异物检测系统还包括终端服务器,终端服务器连接多个雷达检测点,并与雷达检测点进行数据交换。
13.进一步地,终端服务器用于从雷达检测点获取异物的位置信息,并对位置信息进行坐标转换以得到异物在预定坐标系下的坐标信息。
14.进一步地,雷达检测点还包括摄像组件,摄像组件连接终端服务器,用于检测坐标信息对应的异物是否存在。
15.本技术的有益效果是:区别于相关技术的情况,本技术的异物检测系统,包括多个依次间隔设置的雷达检测点,以对跑道进行检测,每个雷达检测点包括mimo雷达,mimo雷达包括两组微带天线阵列,微带天线阵列用于在较大范围内进行异物检测,有效提高瞬时探
测范围,且本技术的异物检测系统可取消伺服结构,进而简化系统结构,且具有及较高的角度分辨率和检测信噪比。
附图说明
16.为了更清楚地说明本技术实施例中的技术方案,下面将对实施例描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的情况下,还可以根据这些附图获得其它的附图,其中:
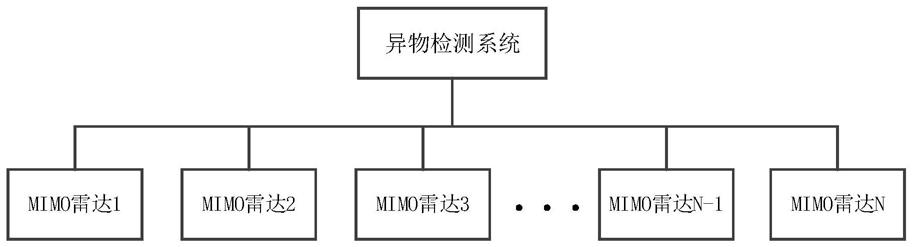
17.图1是本技术提供的异物检测系统的一实施例的框架示意图;
18.图2是本技术提供的异物检测系统中雷达检测点的一实施例的分布示意图;
19.图3是图2中雷达检测点中微带天线阵列的一实施例的排布示意图;
20.图4是本技术提供的异物检测系统中信号处理器的一实施例的框架示意图。
具体实施方式
21.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动情况下所获得的所有其它实施例,均属于本技术保护的范围。
22.需要说明,若本技术实施例中有涉及方向性指示(诸如上、下、左、右、前、后
……
),则该方向性指示仅用于解释在某一特定姿态(如附图所示)下各部件之间的相对位置关系、运动情况等,如果该特定姿态发生改变时,则该方向性指示也相应地随之改变。
23.另外,若本技术实施例中有涉及“第一”、“第二”等的描述,则该“第一”、“第二”等的描述仅用于描述目的,而不能理解为指示或暗示其相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。另外,各个实施例之间的技术方案可以相互结合,但是必须是以本领域普通技术人员能够实现为基础,当技术方案的结合出现相互矛盾或无法实现时应当认为这种技术方案的结合不存在,也不在本技术要求的保护范围之内。
24.fod检测系统对机场安全尤为重要。比如一块塑料布条被吸入发动机会引起空中停车,一个小螺丝钉或者金属片甚至尖锐石子将会扎上轮胎引起爆胎,因此机场的fod检测引起了业界的极大重视。国外市场中,主要的fod检测系统有英国的tarsier系统、以色列的fodetect系统、新加坡的iferret系统和美国的fod finder系统。其中,新加坡的iferret系统使用的是纯光学方案,而其他三个系统均采用毫米波雷达探测为主,视频图像识别技术为辅的手段来探测fod。系统驾驶方式上,fodetect系统采用的是边灯式,fod finder系统采用的是车载式,而tarsier系统采用的是塔架式。
25.本技术提供一种异物检测系统,可以用于对预设范围内的异物进行实时探测,以提高环境的安全。本技术所指的异物包括但不限于石块、金属器件、胶带、报纸或者树叶等。本实施例的异物检测系统可以用于车道或者机场跑道等异物的实时检测,下面以异物检测系统在机场跑道的应用为例进行介绍。
26.请参阅图1和图2所示,图1是本技术提供的异物检测系统的一实施例的结构示意
图,图2是图1中异物检测系统的雷达检测点的一实施例的分布示意图。本实施例中,异物检测系统包括:多个依次间隔设置的雷达检测点20,即本实施例中n个雷达检测点20依次间隔设置,n大于等于1。每个雷达检测点20包括mimo雷达,n个雷达检测点20就包括n个mimo雷达。每个mimo雷达包括两组微带天线阵列,微带天线阵列用于在预设的范围内进行异物检测。
27.进一步地,mimo(multiple-input multiple-output,多输入多输出)雷达,最早来源于mimo通信的概念,近几年来逐步在车载毫米波雷达系统中实现了应用,而且性能得到了较好的验证。mimo雷达,采用多个发射天线和多个接收天线,每个发射天线发射相干波形,接收端进行数字波束合成,从而实现目标角度的估计。可以有效地增加天线的虚拟孔径,从而获得更高的角度分辨率;并且可以将超分辨算法应用到该虚拟阵列中,从而突破天线物理尺寸对角度分辨率的限制。
28.区别于现有技术的情况,本技术的异物检测系统采用mimo雷达,即采用多发射多接收模式,代替原系统中的单发单收模式,一方面可以通过数字波束合成来估计异物的角度,进而获得更高的角度估计精度;另一方面,配合超分辨算法,可以获得更高的角度分辨率。而且,通过使用微带天线阵列能够提高系统的瞬时探测范围。
29.进一步地,本技术提出的异物检测系统可以为边灯式的。如图2所示,在机场跑道上可以间隔设置多个雷达检测点20。异物检测系统可以配置n个分布式雷达检测点20;n个分布式雷达检测点20通过网线或者无线中继与异物检测系统终端服务器相连接,以对机场跑道进行实时异物监测。比如,可以在机场跑道每隔50米到60米左右的距离设置一个雷达检测点20。每个雷达检测点20的mimo雷达传感器的安装高度可以为二十到三十厘米左右。
30.图2中黑色五角星表示单个雷达检测点20,即“边灯”。半圆形虚线表示在每个雷达检测点20设置的mimo雷达的有效作用范围。本实施例中,每个雷达检测点20设置的mimo雷达的有效作用范围可以达到45米。雷达检测点20分别架设在跑道两边,且同侧跑道左右相邻雷达检测点20之间的距离设置为60米。本实施中,以典型的民航跑道为例,跑道宽度为60米,中间高两边低,跑道长度为3600米,为了无缝隙的覆盖跑道所有区域,整条跑道配置120个雷达检测点20。在其他实施中,可以根据机场跑道尺寸和mimo雷达的有效范围来选择雷达检测点20的铺设,在此不做一一列举,只要能使机场跑道能够被mimo雷达有效覆盖即可。
31.进一步地,如图3所示,每个雷达检测点20的mimo雷达包含有两组微带天线阵列,具体地,两组微带天线阵列包括第一微带天线阵列11和第二微带天线阵列12。第一微带天线阵列11和第二微带天线阵列12呈预设的夹角设置,其中,预设的夹角的范围为0
°‑
180
°
。在图3所示的实施例中,以机场跑道的延伸方向为x轴,以与机场跑道延伸方向垂直的方向为y轴,建立坐标系,在本坐标系中,第一微带天线阵列11与第二微带天线阵列的12的夹角为135
°
,第一微带天线阵列11的法线方向与x轴的夹角为45
°
,第二微带天线阵列12的法线方向与x轴的夹角为135
°
,以使第一微带天线阵列11的能量覆盖范围是0
°
~90
°
,第二微带天线阵列12的能量覆盖范围为90
°
~180
°
,两组微带天线阵列的合成波束覆盖范围为0
°
~180
°
,此种方式,通过合理布置第一微带天线阵列11和第二微带天线阵列12,能够使微带天线阵列的能量分布更加均匀。
32.本技术中,微带天线阵列的角度分辨率的范围为1
°‑7°
。本实施例中,每组微带天线阵列可以使用的是4发4收的微带天线阵列,即每组微带天线阵列使用4根发射天线和4根
接收接收天线。该天线阵列可以等效为1发16收的均匀线阵,使用常规数字波束合成算法时,角度分辨率可达7
°
;配合capon或者music等超分辨算法,可以将角度分辨率提升到2
°
以内。
33.进一步地,每个雷达检测点20还包括信号处理器(图未示),信号处理器连接mimo雷达,信号处理器从mimo雷达获取异物的采样数据,并对采样数据进行处理以得到异物的位置信息。
34.其中,异物的位置信息可以包括异物相对mimo雷达的距离、角度和mimo雷达的编号。具体地,信号处理器从mimo雷达中射频前端模块获取adc(analog-to-digital converter,模数转换器)采样数据,并输出异物相对该mimo雷达的距离和方位角度信息,以及对应的雷达编码。
35.进一步地,如图4所示,信号处理器包括依次连接的距离维傅里叶变换模块41、非相参积累模块42、恒虚警检测模块43、距离插值模块44和角度估计模块45,用于对mimo雷达输出的采样数据进行处理并输出异物的位置信息。信号处理器从mimo雷达获取到adc采样数据,并将获取的采样数据依次通过距离维傅里叶变换模块、非相参积累模块、恒虚警检测模块、距离插值模块和角度估计模块,以对该adc采样数据进行处理,得到异物相对该mimo雷达的距离和方位角度信息,以及对应的雷达编码。
36.异物检测系统还包括终端服务器,终端服务器连接多个雷达检测点20,并与多个雷达检测点20进行数据交换。具体地,终端服务器连接每个雷达检测点20的信号处理器,并与信号处理器进行数据交换。
37.具体地,信号处理器在计算出异物的位置信息后,并将该位置信息发送给终端服务器,终端服务器获取到异物的位置信息,并对异物的位置信息进行坐标转换,以得到异物在预定坐标系下的坐标信息。其中,预定坐标系可以为机场跑道坐标系,还可以为其他人工建立的坐标系,以对异物进行定位。
38.本实施例中,异物检测系统的终端服务器,收到来自每个雷达检测点20发送的目标距离和方位角度信息,以及对应的雷达id号,终端服务器根据根据雷达id号进行坐标转换,将每个mimo雷达检测点20发送的目标距离和方位角度信息,转换到机场跑道坐标系下,以确定异物在机场跑道上的坐标位置。即终端服务器获取到异物在机场跑道坐标系下的坐标信息。
39.进一步地,雷达检测点20还包括摄像组件(图未示),摄像组件连接终端服务器,用于检测异物是否存在。当终端服务器获取异物的坐标信息后,启动摄像组件,通过摄像组件进行拍摄图像,以通过所拍摄的图像进行确认该坐标信息对应的异物是否真实存在,通过此种方式,能够提高异物检测的准确性,避免出现误判,从而提高异物检测系统的可靠性。
40.综上,本技术采用较大覆盖方位的微带天线阵列,代替原系统中的窄波束天线,可以有效提高瞬时探测范围。本技术可取消伺服结构,进而简化异物检测系统的结构设计;雷达采用多发射多接收模式,代替原系统中的单发单收模式,可以通过数字波束合成来估计异物的角度,进而获得更高的角度估计精度;配合超分辨算法,可以获得更高的角度分辨率。另外,本技术中,由于天线不再转动,区别于原系统的短波束驻留时间,可以通过更长的时间积累来获得更高的检测信噪比。
41.以上所述仅为本技术的实施方式,并非因此限制本技术的专利范围,凡是利用本
申请说明书及附图内容所作的等效结构或等效流程变换,或直接或间接运用在其它相关的技术领域,均同理包括在本技术的专利保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1