直线轨道往复推手机构的制作方法
1.本实用新型涉及医疗器械技术领域,具体的是一种应用于体外诊断设备上样本传送的推手。
背景技术:
2.体外诊断是在人体之外,通过对人体样本(血液、体液、组织等)进行检测而获取临床诊断信息,进而判断疾病或机体功能的产品和服务。自动化的体外诊断设备通常包括输入样本的进样模块、对样本进行检测的检测模块和将样本在各模块之间转运的轨道模块。进样模块通常设置于轨道模块的端部,样本由进样模块进入轨道模块,由轨道模块转运到相应的检测模块,对样本进行检测。
3.样本在轨道上各位点之间的运动方式是多样的,例如推手、机械臂、传动带等,其中以推手较为常用,尤其是对于以样本架为载体的样本的直线运动。在体外诊断设备的直线轨道上,样本架由样本架起点到样本架终点的动作方式是:推手首先运动至样本架起点上样本架远离样本架终点的端部,推手推动样本架沿轨道运动至样本架终点,而后重新回到样本架起点,样本架起点上补充新的样本架,如此往复运动。
4.当程序设置为在推手推动样本架由样本架起点向样本架终点运动的过程中,样本架起点即开始补充新的样本架时,推手由样本架终点回到样本架起点时,样本架起点上已经有新的样本架,推手需要跨过样本架起点上的样本架,到达样本架远离样本架终点的端部,因此,需要将推手设置为单向通过样本架,即推手可沿样本架起点到样本架终点方向推动样本架,但是在样本架终点到样本架起点方向,推手可跨过样本架。上述功能的实现,通常是靠推手挡块的绕轴单向转动,即推手推动样本架由样本架起点向样本架终点运动时,通过限位机构使推手挡块不能绕轴转动,从而实现推手推动样本架运动;而推手由样本架终点回到样本架起点时,推手的推手挡块可以绕轴转动,从而使推手挡块不受样本架的阻碍,进而到达样本架远离样本架终点的端部。
5.在上述推手挡块绕轴转动的过程中,为了使转动后的推手挡块能够复位,通常是设置弹簧结构,通过样本架时,样本架推动推手挡块,使推手挡块绕轴转动,推手挡块的绕轴转动过程克服弹簧的阻力,通过样本架后,弹簧驱动推手挡块复位。设置弹簧结构的问题在于,推手挡块在通过样本架时,弹簧会使推手挡块与样本架相抵,从而给样本架一个侧压力,使样本架容易侧翻,此外,当推手挡块通过样本架的过程是与样本架上的样本管接触时,样本管之间是有间隙的,推手挡块依次通过样本管,推手挡块在弹簧的作用下,相当于依次敲击样本管,从而引起样本管内样本的震荡,容易造成样本飞溅。
技术实现要素:
6.本实用新型的目的是提供一种推手机构,其在单向通过样本架时,可以使推手挡块不接触样本架,尤其适合体外诊断设备上直线轨道的样本架传送。
7.本实用新型的技术方案是:
8.一种直线轨道往复推手机构,包括轨道机构和样本架推手,所述样本架推手包括推手载板、转轴和推手挡块,推手载板由轨道机构驱动沿直线往复运动,推手载板和推手挡块分别和转轴转动相连,所述推手载板上设有第一限位柱,推手挡块和推手载板之间设有将推手挡块压紧于第一限位柱的第一扭簧,所述样本架推手包括转轴驱动块、与转轴驱动块相配合的导向块和第二扭簧,转轴驱动块和转轴固定相连,导向块和轨道机构固定相连,导向块包括靠近转轴的前侧面和远离转轴的后侧面,转轴驱动块的侧面到转轴的最大距离为l1,前侧面到转轴的最小距离为l2,后侧面到转轴的最小距离为l3,l2<l1<l3,所述推手挡块上设有平行于转轴的第二限位柱,转轴上设有垂直于转轴的拨杆,第二扭簧连接于推手载板和转轴驱动块之间使拨杆压紧于第二限位柱,第一扭簧的扭转力大于第二扭簧的扭转力。
9.在应用时,本实用新型设置于直线轨道的一侧,在直线轨道上,样本架由直线轨道的样本架起点到样本架终点单向运动。具体的,样本架位于直线轨道上的样本架起点,通过轨道机构,将样本架推手运动至样本架远离样本架终点的一侧,该位置为样本架推手的初始位置,样本架推手推动样本架到达样本架直线轨道上的样本架终点;样本架起点补充新的样本架,样本架推手由样本架终点返回样本架起点,样本架在通过样本架起点上的样本架时,样本架推手的推手挡块不与样本架接触,样本架推手回到样本架推手的起点位置,完成一个往复动作。
10.导向块位于样本架起点处,导向块的长度与样本架的长度相配合。
11.在一个往复动作中,样本架推手的几个动作过程如下,
12.1.样本架推手在初始位置时:
13.第一扭簧的一端被推手载板限位,另一端将推手挡块压紧于第一限位柱,推手挡块无法顺时针转动,第二扭簧的一端被推手载板限位,另一端被转轴驱动块限位,给转轴驱动块一个相对于推手载板逆时针转动的推力,转轴驱动块将推力通过转轴传递至拨杆,使拨杆压紧于第二限位柱,由于第一弹簧的扭转力大于第二弹簧的扭转力,从而使推手挡块保持压紧于第一限位柱的状态,推手挡块可以向远离第一限位柱的方向(即样本架起点到样本架终点方向)推动样本架,此状态下,转轴驱动块的长度方向垂直于导向块的前侧面,转轴驱动块和导向块不接触,该状态为样本架推手的初始状态。
14.2.样本架推手推动样本架由样本架起点向样本架终点方向运动时:
15.转轴驱动块接触导向块,转轴驱动块被导向块靠近样本架推手初始位置的一端所限位发生顺时针转动,第二扭簧收缩;转轴驱动块带动转轴,转轴带动拨杆转动,拨杆顺时针转动脱离第二限位柱,但推手挡块姿态保持不动,依然推动样本架。转轴驱动块脱离导向块后,第二扭簧舒张,样本架推手回到初始状态。
16.3.样本架推手推动样本架由样本架终点向样本架起点方向运动时:
17.转轴驱动块在接触导向块前,样本架推手保持初始状态;转轴驱动块接触导向块,转轴驱动块被导向块远离样本架推手初始位置的一端所限位发生顺时针转动,转轴驱动块依次通过转轴、拨杆和第二限位柱,驱动推手挡块发生转动,使样本架推手在经过样本架起点上的样本架时,推手挡块不与样本架接触。
18.4.样本架推手回到初始位置时,转轴驱动块脱离导向块,样本架推手回到初始状态。
19.优选的,所述推手挡块远离转轴的一端为楔形。楔形的推手挡块可以使推手挡块转动较小的角度即可与样本架不接触。
20.具体的,所述导向块为梯形结构,导向块的前侧面为梯形结构的短边。
21.梯形的导向块可以使转轴驱动块在接触和脱离导向块的过程中较为平缓。
22.所述转轴驱动块远离转轴的端部为圆柱面,圆柱面与导向块的斜边相配合。
23.所述第一限位柱平行于转轴,所述推手挡块的侧面包括轴线与转轴轴线重合的圆柱面和与圆柱面相连的侧平面,推手挡块的侧面与第一限位柱相配合使推手挡块绕转轴单向转动。
24.当推手挡块逆时针转动时,圆柱面与第一限位柱相配合,推手挡块可以转动,推手挡块顺时针转动时,侧平面与第一限位柱相抵,推手挡块无法转动,上述结构实现了推手挡块的单向转动。
25.所述第一扭簧的两端分别通过扭簧限位柱与推手载板和推手挡块相连,所述第二扭簧的两端分别通过扭簧限位柱与推手载板和转轴驱动块相连,所述扭簧限位柱包括螺帽和螺杆,螺杆与推手载板、推手挡块或转轴驱动块螺纹连接。
26.扭簧限位柱的螺杆结构在保证扭簧功能的基础上,便于安装。
27.所述轨道机构包括推手轨道、同步带和电机,电机驱动同步带,同步带驱动推手载板沿推手轨道往复运动,导向块和推手轨道固定相连。
28.推手轨道与直线轨道的方向相同,推手轨道固定于直线轨道的一侧,推手载板与推手轨道滑动相连,导向块通过连接板与推手轨道固定相连。
29.本实用新型具有的优点和积极效果是:由于采用上述技术方案,样本架推手推动样本架在直线轨道上单向运动,在跨越样本架时,样本架推手与样本架不接触,避免了样本架推手对样本架产生的侧推力,使样本架更稳定,不易倾覆,样本架内的样本液体不会飞溅。
附图说明
30.图1是本实用新型的结构原理示意图
31.图2是轴侧视角下转轴驱动块和导向块的位置关系示意图
32.图3俯视视角下转轴驱动块和导向块的位置关系示意图
33.图4是图3中a处的细节图
34.图5是样本架推手的结构示意图
35.图6是推手挡块的结构示意图
36.图中:
37.1、样本架推手
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2、轨道机构
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3、导向块
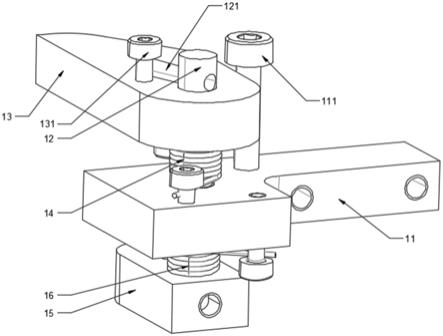
38.4、直线轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11、推手载板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
12、转轴
39.13、推手挡块
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
14、第一扭簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
15、转轴驱动块
40.16、第二扭簧
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
21、推手轨道
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
22、同步带
41.41、样本架起点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
42、样本架终点
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
111、第一限位柱
42.121、拨杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
131、第二限位柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
132、圆柱面
43.133、侧平面
具体实施方式
44.如图1-6所示,本实用新型:
45.一种直线轨道往复推手机构,包括轨道机构2和样本架推手1,所述样本架推手1包括推手载板11、转轴12和推手挡块13,推手载板13由轨道机构2驱动沿直线往复运动,推手载板11和推手挡块13分别和转轴12转动相连,所述推手载板11上设有第一限位柱111,推手挡块13和推手载板11之间设有将推手挡块13压紧于第一限位柱111的第一扭簧14,所述样本架推手1包括转轴驱动块15、与转轴驱动块15相配合的导向块3和第二扭簧16,转轴驱动块15和转轴12固定相连,导向块3和轨道机构2固定相连,导向块3包括靠近转轴的前侧面和远离转轴的后侧面,
46.如图4所示,
47.转轴驱动块15的侧面到转轴12的最大距离为l1,前侧面到转轴12的最小距离为l2,后侧面到转轴12的最小距离为l3,l2<l1<l3,所述推手挡块13上设有平行于转轴12的第二限位柱131,转轴12上设有垂直于转轴12的拨杆121,第二扭簧16连接于推手载板11和转轴驱动块15之间使拨杆121压紧于第二限位柱131,第一扭簧14的扭转力大于第二扭簧16的扭转力。
48.导向块位于样本架起点41处,导向块3的长度与样本架的长度相配合。
49.所述推手挡块13远离转轴12的一端为楔形。
50.所述导向块3为梯形结构,导向块3的前侧面为梯形结构的短边。
51.所述转轴驱动块15远离转轴12的端部为圆柱面,圆柱面与导向块3的斜边相配合。
52.所述第一限位柱111平行于转轴12,所述推手挡块13的侧面包括轴线与转轴12轴线重合的圆柱面132和与圆柱面相连的侧平面133,推手挡块的侧面与第一限位柱111相配合使推手挡块13绕转轴12单向转动。
53.当推手挡块13逆时针转动时,圆柱面132与第一限位柱111相配合,推手挡块13可以转动,推手挡块13顺时针转动时,侧平面133与第一限位柱111相抵,推手挡块13无法转动,上述结构实现了推手挡块13的单向转动。
54.所述第一扭簧14的两端分别通过扭簧限位柱与推手载板11和推手挡块13相连,所述第二扭簧16的两端分别通过扭簧限位柱与推手载板11和转轴驱动块15相连,所述扭簧限位柱包括螺帽和螺杆,螺杆与推手载板、推手挡块或转轴驱动块螺纹连接。
55.如图2所示,
56.所述轨道机构2包括推手轨道21、同步带22和电机,电机驱动同步带22,同步带22驱动推手载板11沿推手轨道21往复运动,导向块3和推手轨道21固定相连。
57.推手轨道21与直线轨道4的方向相同,推手轨道21固定于直线轨道的一侧,推手载板11与推手轨道21滑动相连,导向块3通过连接板与推手轨道21固定相连。
58.本实例的工作过程:
59.如图1所示,
60.在应用时,本实用新型设置于直线轨道4的一侧,在直线轨道4上,样本架由直线轨道的样本架起点41到样本架终点42单向运动。具体的,样本架位于直线轨道上的样本架起点41,通过轨道机构2,将样本架推手运动至样本架远离样本架终点42的一侧,该位置为样本架推手的初始位置,样本架推手1推动样本架到达样本架直线轨道4上的样本架终点42;
样本架起点41补充新的样本架,样本架推手由样本架终点42返回样本架起点41,样本架在通过样本架起点41上的样本架时,样本架推手的推手挡块13不与样本架接触,样本架推手回到样本架推手的起点位置,完成一个往复动作。
61.1.样本架推手在初始位置时:
62.第一扭簧14的一端被推手载板11限位,另一端将推手挡块13压紧于第一限位柱111,推手挡块13无法顺时针转动,第二扭簧16的一端被推手载板11限位,另一端被转轴驱动块15限位,给转轴驱动块15一个相对于推手载板11逆时针转动的推力,转轴驱动块15将推力通过转轴12传递至拨杆121,使拨杆121压紧于第二限位柱131,由于第一弹簧14的扭转力大于第二弹簧16的扭转力,从而使推手挡块13保持压紧于第一限位柱111的状态,推手挡块13可以向远离第一限位柱111的方向(即样本架起点41到样本架终点42方向)推动样本架,此状态下,转轴驱动块15的长度方向垂直于导向块3的前侧面,转轴驱动块15和导向块3不接触,该状态为样本架推手的初始状态。
63.2.样本架推手推动样本架由样本架起点41向样本架终点42方向运动时:
64.转轴驱动块15接触导向块3,转轴驱动块15被导向块3靠近样本架推手初始位置的一端所限位发生顺时针转动,第二扭簧16收缩;转轴驱动块15带动转轴12,转轴12带动拨杆121转动,拨杆121顺时针转动脱离第二限位柱131,但推手挡块13姿态保持不动,依然推动样本架。转轴驱动块15脱离导向块13后,第二扭簧16舒张,样本架推手1回到初始状态。
65.3.样本架推手推动样本架由样本架终点42向样本架起点41方向运动时:
66.转轴驱动块15在接触导向块3前,样本架推手保持初始状态;转轴驱动块15接触导向块3,转轴驱动块15被导向块3远离样本架推手初始位置的一端所限位发生顺时针转动,转轴驱动块15依次通过转轴12、拨杆121和第二限位柱131,驱动推手挡块13发生转动,使样本架推手在经过样本架起点41上的样本架时,推手挡块13不与样本架接触。
67.4.样本架推手回到初始位置时,转轴驱动块15脱离导向块3,样本架推手回到初始状态。
68.以上对本实用新型的一个实施例进行了详细说明,但所述内容仅为本实用新型的较佳实施例,不能被认为用于限定本实用新型的实施范围。凡依本实用新型申请范围所作的均等变化与改进等,均应仍归属于本实用新型的专利涵盖范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1