一种烟田面积测量装置的制作方法
1.本实用新型实施例涉及测绘设备技术领域。
背景技术:
2.现有技术中对于烟田的面积测量,一般是采用红外测距仪,以地理测绘的方式进行。
3.实用新型人发现现有技术中至少存在如下问题:以地理测绘的方式测量烟田面积,需要专人围绕烟田行进至少一圈,一方面是红外测距仪需要插杆以确保红外反射准确无误,另一方面是部分地区气候条件较差,长期有大雾,红外光散射情况严重,测距过程中需要等待气候合适;因此现有技术中,烟田测量的工作,人力成本和时间成本都较高。
技术实现要素:
4.本实用新型实施方式的目的在于提供一种烟田面积测量装置,能有效实现在近端对地面远处定点距离测量,从而辅以现有技术中的水平角度值测量和极坐标变换计算技术即可轻易实现一定点测量整片烟田面积,大幅降低人力成本和时间成本。
5.为解决上述技术问题,本实用新型的实施方式提供了一种烟田面积测量装置,包括呈伸缩杆体结构的底杆和顶杆;底杆顶端可转动安装有视觉模组,视觉模组和底杆之间有角度传感器;底杆垂直立置且可水平转动,底杆内置角度传感器用于测量水平转动角度。
6.所述视觉模组为双目测距仪。
7.所述底杆和顶杆之间还有中杆。
8.所述底杆、中杆、顶杆之间衔接的位置有定高插孔,有定高插销穿过定高插孔实现定高。
9.所述顶杆顶端有顶锥,视觉模组装在顶锥上。
10.所述顶锥顶端为滚转球头,视觉模组底部有匹配于滚转球头的半球结构。
11.在视觉模组的前后方向上均有伸缩杆可转动安装在顶锥上,伸缩杆前端可转动安装于视觉模组。
12.所述伸缩杆上端通过拉环组件可转动安装,伸缩杆下端通过转轮组件可转动安装。
13.所述视觉模组在前后方向上分别有辅助板一体固定,伸缩杆可转动安装于辅助板底部。
14.所述视觉模组两侧有辅助杆可转动固定,辅助杆下端固定于顶锥。
15.本实用新型实施方式相对于现有技术而言,能有效实现在近端对地面远处定点距离测量,从而辅以现有技术中的极坐标变换计算技术即可轻易实现一定点测量整片烟田面积,大幅降低人力成本和时间成本,且结构上多可电控,有利于自动化测量的实现。
16.上述说明仅是本实用新型技术方案的概述,为了能够更清楚了解本实用新型的技术手段,而可依照说明书的内容予以实施,并且为了让本实用新型的上述和其它目的、特征
和优点能够更明显易懂,以下特举本实用新型的具体实施方式。
附图说明
17.一个或多个实施例通过与之对应的附图中的图片进行示例性说明,这些示例性说明并不构成对实施例的限定,附图中具有相同参考数字标号的元件表示为类似的元件,除非有特别申明,附图中的图不构成比例限制。
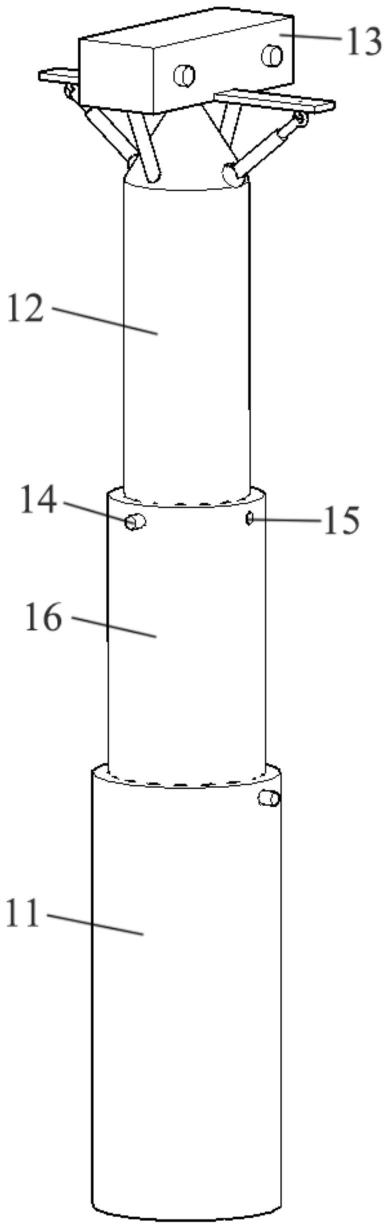
18.图1是本实用新型至少一种实施方式的结构示意图;
19.图2是图1的局部放大结构示意图;
20.图3是图2的爆炸结构示意图;
21.图4是本实用新型使用时的原理示意图。
22.图中:11-底杆,12-顶杆,13-视觉模组,14-定高插销,15-定高插孔,16-中杆,17-顶锥,18-滚转球头,21-伸缩杆,22-拉环组件,23-转轮组件,24-辅助板,25-辅助杆。
具体实施方式
23.为使本技术实施例的目的、技术方案和优点更加清楚,下面将结合附图对本技术的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本技术各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术所要求保护的技术方案。以下各个实施例的划分是为了描述方便,不应对本技术的具体实现方式构成任何限定,各个实施例在不矛盾的前提下可以相互结合相互引用。
24.本技术的第一实施方式涉及一种烟田面积测量装置。其结构如图1至图3所示,具体如下:包括呈伸缩杆体结构的底杆11和顶杆12;底杆11顶端可转动安装有视觉模组13,视觉模组13和底杆11之间有角度传感器;底杆11垂直立置且可水平转动,底杆11内置角度传感器用于测量水平转动角度。
25.本实施方式的核心在于以单杆驻点位置实现远处多点的距离测量,以通过极坐标变换为平面坐标,从而轻易计算得到烟田面积,其中,极坐标的角度值可以直接通过测量视觉模组13朝向的相对水平角度得到,这是基于现有技术能够轻易实现的,类似的,对于本实施方式而言,测量底杆11相对于地面的水平转动角度亦可,因此,考虑到极坐标变换计算的过程是现有技术成熟方案,本技术不再赘述。
26.本实施方式中在实际使用中的典型应用方式如图1所示,至少存在一种可行方案:基于确定的底杆11底部至顶杆12顶部的高度h,将视觉模组13对准远处定点,此时基于本实施方式给中角度传感器的安装,可以测得视觉模组13朝向与地面之间存在夹角α,因此底杆11和远处定点之间的距离d可以通过d=h
·
cot(α)计算得到。由此往复测量烟田多个边沿处的远处定点,从而结合水平角度值测量和极坐标变换计算,可以轻易计算得到烟田面积,且这类计算的计算量都不大,可以在mcu片上实现。
27.本技术的第二实施方式涉及一种烟田面积测量装置。第二实施方式与第一实施方式大致相同,主要区别之处在于:在本技术第二实施方式中,所述视觉模组13为双目测距仪。本领域技术人员可以理解,基于本实施方式的典型应用方式如图1所示,相对于第一实施方式而言,存在另一种可行方案:将视觉模组13对准远处定点,此时基于本实施方式给中
角度传感器的安装,可以测得视觉模组13朝向与地面之间存在夹角α,并且基于双目测距的方式可以测得视觉模组13和远处定点之间的距离s,因此底杆11和远处定点之间的距离d可以通过d=s
·
sin(α)计算得到。
28.本技术的第三实施方式涉及一种烟田面积测量装置。第三实施方式与第一实施方式大致相同,主要区别之处在于:在本技术第三实施方式中,所述底杆11和顶杆12之间还有中杆16此外。本领域技术人员可以理解,中杆16的设置主要在于增加整体最大高度,提升便携性。
29.本技术的第四实施方式涉及一种烟田面积测量装置。第四实施方式与第三实施方式大致相同,主要区别之处在于:在本技术第四实施方式中,所述底杆11、中杆16、顶杆12之间衔接的位置有定高插孔15,有定高插销14穿过定高插孔15实现定高。本领域技术人员可以理解,基于定高插孔15和定高插销14的设置,有利于得到确定的底杆11底部至顶杆12顶部的高度h,如定高插孔15和定高插销14上设置合适的传感器或电气测量元件,则高度h可直接传入用于计算的mcu。
30.本技术的第五实施方式涉及一种烟田面积测量装置。第五实施方式与第一实施方式大致相同,主要区别之处在于:在本技术第五实施方式中,所述顶杆12顶端有顶锥17,视觉模组13装在顶锥17上。本领域技术人员可以理解,顶锥17的设置,是为了确保视觉模组13有足够大的转动角度范围。
31.本技术的第六实施方式涉及一种烟田面积测量装置。第六实施方式与第五实施方式大致相同,主要区别之处在于:在本技术第六实施方式中,所述顶锥17顶端为滚转球头18,视觉模组13底部有匹配于滚转球头18的半球结构。本领域技术人员可以理解,滚转球头18的设置,在于确保视觉模组13有足够大的转动角度范围的同时,视觉模组13能够安装稳定。
32.本技术的第七实施方式涉及一种烟田面积测量装置。第七实施方式与第五实施方式大致相同,主要区别之处在于:在本技术第七实施方式中,在视觉模组13的前后方向上均有伸缩杆21可转动安装在顶锥17上,伸缩杆21前端可转动安装于视觉模组13。本领域技术人员可以理解,当伸缩杆21采用电控伸缩杆,则视觉模组13的俯仰角可由电控实现,即视觉模组13朝向与地面之间存在夹角α可电控调节,便于实现自动化。
33.本技术的第八实施方式涉及一种烟田面积测量装置。第八实施方式与第七实施方式大致相同,主要区别之处在于:在本技术第八实施方式中,所述伸缩杆21上端通过拉环组件22可转动安装,伸缩杆21下端通过转轮组件23可转动安装。本领域技术人员可以理解,本实施方式是伸缩杆21具体安装时的一种最优选方案。
34.本技术的第九实施方式涉及一种烟田面积测量装置。第九实施方式与第七实施方式大致相同,主要区别之处在于:在本技术第九实施方式中,所述视觉模组13在前后方向上分别有辅助板24一体固定,伸缩杆21可转动安装于辅助板24底部。本领域技术人员可以理解,本实施方式能有效提升伸缩杆21控制视觉模组13转动角度的范围。
35.本技术的第十实施方式涉及一种烟田面积测量装置。第十实施方式与第五实施方式大致相同,主要区别之处在于:在本技术第十实施方式中,所述视觉模组13两侧有辅助杆25可转动固定,辅助杆25下端固定于顶锥17。本领域技术人员可以理解,本实施方式能有效确保视觉模组13侧方向上的稳定性。
36.本领域的普通技术人员可以理解,上述各实施方式是实现本技术的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本技术的精神和范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1