一种通信和点阵输出融合型磁导航传感器的制作方法
1.本实用新型涉及导航领域,具体为一种通信和点阵输出融合型磁导航传感器。
背景技术:
2.磁导航传感器技术是利用集磁道钉的磁场特性研究磁信号检测、车辆与磁道钉之间相对运动于一体的试验平台。在此平台上模拟实地的车辆磁道钉导航自动驾驶设计车辆的直线运动、s形运动以及加速等运动模式,并编写软件程序实现功能需求。现有的磁导航传感器采用单一的通信输出或点阵输出信号的方式进行导航,导航响应慢、精度控制有待提高。
3.鉴于此,有必要提供一款解决上述问题的一种通信和点阵输出融合型磁导航传感器。
技术实现要素:
4.本实用新型提供的一种通信和点阵输出融合型磁导航传感器克服了现有技术的不足,本实用新型所采用的技术方案是:
5.一种通信和点阵输出融合型磁导航传感器,包括单片机和电源模块。所述单片机与用于输出总线信号的通信模块电连接,所述单片机与用于输出点阵信号的点阵输出模块电连接,所述单片机与用于获取磁导航信号的霍尔传感器矩阵连接。
6.进一步的是:所述通信模块的包含can总线。
7.进一步的是:所述can总线采用tjf1051通讯芯片,所述通信模块和单片机之间设置有用于隔离电源模块和can总线的第一隔离电路。
8.进一步的是:所述通信模块包含rs485总线。
9.进一步的是:所述rs485总线采用max3485e通讯芯片,所述通信模块和单片机之间设置有用于隔离电源模块和rs485总线的第二隔离电路。
10.进一步的是:所述通信模块包含rs232总线。
11.进一步的是:所述rs232总线采用max3232e通讯芯片。
12.进一步的是:所述霍尔传感器矩阵由若干霍尔传感器以10mm为一个间距阵列排列组成。
13.本实用新型的有益效果:
14.1、通过点阵输出和通信输出互补实现更好的定位功能;
15.2、使用更加方便,可以适配通信和点阵两种功能之一或者通信和点阵两种同时使用。
附图说明
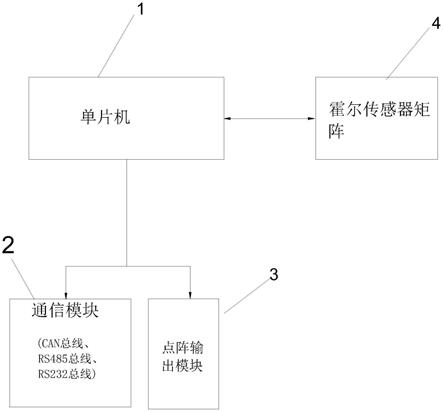
16.图1为本技术的实施例的通信和点阵输出融合型磁导航传感器的模块示意图;
17.图2为本技术的实施例的通信和点阵输出融合型磁导航传感器主控制器的结构电
路示意图;
18.图3为本技术的实施例的通信和点阵输出融合型磁导航传感器的电源电路示意图;
19.图4为本技术的实施例的通信和点阵输出融合型磁导航传感器的rs232通讯电路示意图;
20.图5为本技术的实施例的通信和点阵输出融合型磁导航传感器的can总线通讯电路示意图;
21.图6为本技术的实施例的通信和点阵输出融合型磁导航传感器的ra485总线通讯电路示意图;
22.图7为本技术的实施例的通信和点阵输出融合型磁导航传感器的霍尔传感器的矩阵示意图;
23.图8为本技术的实施例的通信和点阵输出融合型磁导航传感器的点阵输出模块的电路示意图;
24.图中标记为:1、单片机;2、通信模块;3、点阵输出模块;4、霍尔传感器矩阵。
具体实施方式
25.为使本发明的上述目的、特征和优点能够更加明显易懂,下面结合附图对本发明的具体实施方式做详细的说明。在下面的描述中阐述了很多具体细节以便于充分理解本发明。但是本发明能够以很多不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本发明内涵的情况下做类似改进,因此本发明不受下面公开的具体实施例的限制。
26.需要说明的是,当元件被称为“固定于”另一个元件,它可以直接在另一个元件上或者也可以存在居中的元件。当一个元件被认为是“连接”另一个元件,它可以是直接连接到另一个元件或者可能同时存在居中元件。
27.除非另有定义,本文所使用的所有的技术和科学术语与属于本发明的技术领域的技术人员通常理解的含义相同。本文中在本发明的说明书中所使用的术语只是为了描述具体的实施例的目的,不是旨在于限制本发明。本文所使用的术语“及/或”包括一个或多个相关的所列项目的任意的和所有的组合。
28.如图1所示,本技术的实施例提供了一种通信和点阵输出融合型磁导航传感器,包括单片机1和电源模块,所述单片机1与用于输出总线信号的通信模块2电连接,所述单片机1 与用于输出点阵信号的点阵输出模块3电连接,所述单片机1与用于获取磁导航信号的霍尔传感器矩阵4连接。
29.需说明的是,通信模块2直接进行总线通信,点阵输出模块3输出点阵信号给外部控制设备,例如plc或某种接口模块。点阵输出模块3以有源信号输出模式输出磁导航传感器便宜点阵信号。
30.工作时,接通电源模块,单片机1读取霍尔传感器矩阵4获取的磁性导航信号,并将磁性导航信号转换成导航偏移量数据,并通过通信模块2输出总线信号或通过点阵输出模块3 与外部控制设备连接输出控制信号。
31.上述设计中,单片机1同时连接通信模块2与点阵输出模块3,通过点阵输出和通信输出互补实现更好的定位功能;客户可以根据自身的需求选择点阵输出模块3接口或通信
模块输出2接口,使用更加方便,可以适配通信和点阵两种功能之一或者通信和点阵两种同时使用。点阵输出模块3以24v有源信号输出模式输出信号,即每个霍尔传感器对应一路24v信号,根据霍尔传感器读到的位置,在24v信号对应的位置输出24v,没信号的位置输出0v,能够使得信号的传输更为稳定。
32.具体地:如图5所示,所述通信模块2包含can总线。
33.上述设计中,采用can总线通讯具有抗干扰能力强,传输距离远,成本低、实时性强的优点。
34.具体地:如图1和图5所示,所述can总线采用tjf1051通讯芯片,所述通信模块2和单片机1之间设置有用于隔离电源模块和can总线的第一隔离电路。
35.上述设计中,第一隔离电路隔离电源模块和can总线,即第一隔离电路将霍尔传感器的电源和can总线隔离,使得can总线的电路有更好的抗干扰性和系统稳定性。第一隔离电路能够减小干扰信号对霍尔传感器造成影响,使得通信模块2中的通讯数据传输更稳定。
36.具体地:如图1所示,所述通信模块2包含rs485总线。
37.rs485总线是一种常见的串行总线标准,采用平衡发送与差分接收的方式,因此具有抑制共模干扰的能力。
38.上述设计中,采用rs485总线进行通信有助于系统稳定的运行,通讯速率高。同时增加了客户的选择,使得客户在使用时更加方便。
39.具体地:如图6所示,所述rs485总线采用max3485e通讯芯片,所述通信模块2和单片机1之间设置有用于隔离电源模块和rs485总线的第二隔离电路。
40.上述设计中,第二隔离电路将霍尔传感器的电源与rs485隔离,因此rs485总线的电路有更好的抗干扰性和系统稳定性。第二隔离电路防止rs485总线上的干扰信号影响霍尔传感器或者对霍尔传感器造成破坏性作用,使得rs485总线的电路在抗干扰性和系统稳定性有更好的表现,使得rs485总线通讯的通讯数据传输更稳定。
41.具体地:如图1所示,所述通信模块2的包含rs232总线。
42.上述设计中采用rs232总线通信可以使不同的设备方便的连接。
43.具体地:如图4所示,所述rs232总线采用max3232e通讯芯片通信。
44.上述设计中max3232e的功耗较低,能够降低rs232总线通信时的发热程度。
45.具体地:如图7所示,所述霍尔传感器矩阵4由若干霍尔传感器以10mm为一个间距阵列排列组成。
46.需说明的是,业界默认霍尔传感器阵列间距为10mm,此间距能够使阵列效果最佳。
47.上述设计中,若干霍尔传感器组合成矩阵能够增大磁感应区域,因此霍尔传感器矩阵4 能够更好的监测磁场,保证导航的准确性。
48.以上所述的具体实施例,对本实用新型的目的、技术方案和有益效果进行了进一步详细说明,所应理解的是,以上所述仅为本实用新型的具体实施例而已,并不用于限制本实用新型,凡在本实用新型的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1