AEBS测试时行人横穿测试系统的制作方法
aebs测试时行人横穿测试系统
技术领域
1.本实用新型涉及aebs(advanced emergency braking system,紧急刹车辅助系统)测试技术领域,特别涉及一种aebs测试时行人横穿测试系统。
背景技术:
2.随着各类先进传感器和算法的快速发展,车辆上搭载的先进汽车辅助驾驶系统(advanced driving assistance system,adas)已越来越成熟,adas系统在防止或减少交通事故上产生的社会效益已越来越显现,随着各类adas系统在在研车型上的大批搭载验证,各类测试的测试需求频率越来越高,测试场景的精确性要求也越来越高。
3.相关技术中,行人横穿场景测试方案主要有地面导轨拖拽及测试人员主动拖拽两种方式。
4.然而,地面导轨拖拽系统价格昂贵,设备及假人容易在测试过程中遭受测试车辆碾压损毁,测试成本巨大,不适合在开发阶段进行调试测试,而测试人员主动拖拽方式在碰撞时机控制上难以满足试验要求,亟待解决。
技术实现要素:
5.本实用新型提供一种aebs测试时行人横穿测试系统,以解决aebs测试中行人横穿场景的假人控制过程中假人及设备易受损、碰撞时机精确控制等问题,仅使用机械结构完成被碰测试假人的防损回收,减少测试假人接触地面撞击时带来的摩擦力,不仅可以减少测试成本,且具备精准碰撞时机控制。
6.本实用新型提供一种aebs测试时行人横穿测试系统,包括:
7.伺服电机、导轨及其速度控制系统;
8.设置于测试跑道上方的横跨门式梁结构,用于为所述导轨提供悬挂,使得所述横跨门式梁结构安装所述伺服电机、所述导轨及其速度控制系统;
9.可摆脱吊钩及触发式收缩机构,所述可摆脱吊钩及触发式收缩机构悬吊于所述导轨上,随着所述导轨活动而移动;
10.遮光式光电传感器系统;以及
11.测试假人,用于在所述速度控制系统根据行人横穿测试任务利用所述伺服电机控制所述导轨沿着横穿轨迹活动时,利用所述遮光式光电传感器系统预先设置的位置,匹配所述伺服电机触发的时机,使得所述可摆脱吊钩及触发式收缩机构在发生测试车辆与所述测试假人碰撞时与所述测试假人进行脱离。
12.可选地,所述测试假人包括:
13.假人本体;
14.设置于所述假人本体上的数据采集磁传感器。
15.可选地,所述导轨设置有限位继电器。
16.可选地,所述测试假人的头顶与所述可摆脱吊钩通过软绳相连。
17.可选地,所述触发式收缩机构包括:
18.套环,所述套环在所述可摆脱吊钩与所述测试假人脱离后,接收所述可摆脱吊钩。
19.可选地,所述可摆脱吊钩的开口方向与所述测试车辆行驶方向对应设置。
20.可选地,所述遮光式光电传感器系统,包括:
21.遮光式光电传感器系统发射装置和遮光式光电传感器系统接收装置,其中,所述遮光式光电传感器系统发射装置和所述遮光式光电传感器系统接收装置相互通讯。
22.由此,可以在速度控制系统根据行人横穿测试任务利用伺服电机控制导轨沿着横穿轨迹活动时,利用遮光式光电传感器系统预先设置的位置,匹配伺服电机触发的时机,使得可摆脱吊钩及触发式收缩机构在发生测试车辆与测试假人碰撞时与测试假人进行脱离。由此,解决了相关技术中aebs测试中行人横穿场景的假人控制过程中假人及设备易受损、碰撞时机精确控制等问题,仅使用机械结构完成被碰测试假人的防损回收,减少测试假人接触地面撞击时带来的摩擦力,不仅可以减少测试成本,且具备精准碰撞时机控制。
23.本实用新型附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本实用新型的实践了解到。
附图说明
24.本实用新型上述的和/或附加的方面和优点从下面结合附图对实施例的描述中将变得明显和容易理解,其中:
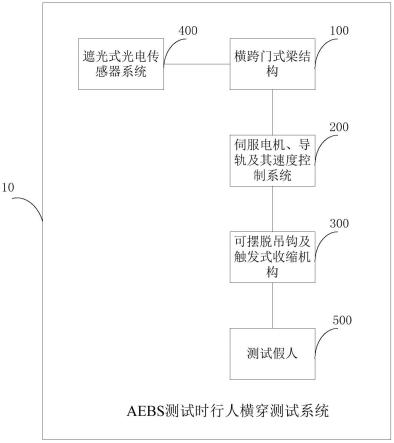
25.图1为根据本实用新型实施例提供的一种aebs测试时行人横穿测试系统的方框示意图;
26.图2为根据本实用新型一个实施例的假人精准移动及摆脱机构的示例图;
27.图3为根据本实用新型一个实施例的可摆脱吊钩及触发式收缩机构的示意图;
28.图4为根据本实用新型一个实施例的aebs测试时行人横穿测试系统的测试环境示意图;
29.图5为根据本实用新型一个实施例的aebs测试时行人横穿测试系统的测试示意图。
具体实施方式
30.下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,旨在用于解释本实用新型,而不能理解为对本实用新型的限制。
31.下面参考附图描述本实用新型实施例的aebs测试时行人横穿测试系统。针对上述背景技术中心提到的aebs测试中行人横穿场景的假人控制过程中假人及设备易受损、碰撞时机精确控制等问题,本实用新型提供了一种aebs测试时行人横穿测试系统,可以在速度控制系统根据行人横穿测试任务利用伺服电机控制导轨沿着横穿轨迹活动时,利用遮光式光电传感器系统预先设置的位置,匹配伺服电机触发的时机,使得可摆脱吊钩及触发式收缩机构在发生测试车辆与测试假人碰撞时与测试假人进行脱离。由此,解决了相关技术中aebs测试中行人横穿场景的假人控制过程中假人及设备易受损、碰撞时机精确控制等问
题,仅使用机械结构完成被碰测试假人的防损回收,减少测试假人接触地面撞击时带来的摩擦力,不仅可以减少测试成本,且具备精准碰撞时机控制。
32.具体而言,图1为本实用新型实施例所提供的一种aebs测试时行人横穿测试系统的方框示意图。
33.如图1所示,该aebs测试时行人横穿测试系统10包括:伺服电机、导轨及其速度控制系统100、横跨门式梁结构200、可摆脱吊钩及触发式收缩机构300、遮光式光电传感器系统400和测试假人500。
34.其中,横跨门式梁结构200设置于测试跑道上方,横跨门式梁结构200用于为导轨提供悬挂,使得横跨门式梁结构200安装伺服电机、导轨及其速度控制系统100;可摆脱吊钩及触发式收缩机构300悬吊于导轨上,随着导轨活动而移动;测试假人500用于在速度控制系统根据行人横穿测试任务利用伺服电机控制导轨沿着横穿轨迹活动时,利用遮光式光电传感器系统400预先设置的位置,匹配伺服电机触发的时机,使得可摆脱吊钩及触发式收缩机构300在发生测试车辆与测试假人碰撞时与测试假人进行脱离。
35.可选地,在一些实施例中,测试假人500包括:假人本体;设置于假人本体上的数据采集磁传感器。
36.具体地,该aebs测试时行人横穿测试系统10可以包括:伺服电机、导轨及其速度控制系统100、横跨门式梁结构200、可摆脱吊钩及触发式收缩机构300、遮光式光电传感器系统400和测试假人500。其中,遮光式光电传感器系统400可以为反光板型光电开关,测试假人500可以为包含视觉、雷达、激光雷达和pmd属性的气球型假人。
37.具体而言,横跨门式梁结构200设置于测试跑道上方(类似过街天桥),为活动导轨提供悬挂,横跨门式梁结构200用于安装悬吊伺服电机系统导轨;可摆脱吊钩及触发式收缩机构300悬吊于导轨上,随导轨移动而移动,测试假人500悬吊于可摆脱吊钩上。利用伺服电机控制导轨按各类设计工况移动,利用遮光式光电传感器系统400(反光板型光电开关)设置的位置,匹配伺服电机触发的时机,利用可摆脱吊钩及触发式收缩机构在可能发生测试车辆与假人碰撞时脱离收缩悬吊的假人离开,防止假人机构被继续行驶的车辆碾压损毁。
38.为使得本领域技术人员进一步了解本实用新型实施例的aebs测试时行人横穿测试系统10,下面结合具体实施例进行详细阐述。
39.可选地,在一些实施例中,导轨设置有限位继电器。
40.可选地,在一些实施例中,测试假人500的头顶与可摆脱吊钩通过软绳相连。
41.可选地,在一些实施例中,可摆脱吊钩的开口方向与测试车辆行驶方向对应设置。
42.如图2所示,图2为本实用新型一个实施例的aebs测试时行人横穿测试系统的示意图。其中,
①
为横跨于测试跑道上的球笼钢构(即横跨门式梁结构200),该钢构可利用已有的过街天桥,压缩气、冷却水跨路钢构,
②
为安装于钢构下方的伺服电机导轨,导轨安装限位继电器,
③
为包含调距螺杆(带锁紧防转螺母)的测试假人悬吊钢缆(刚性结构),
④
为测试假人回收弹索,可摆脱吊钩及触发式收缩机构300安装时需吊钩开口方向需同车辆行驶方向。
43.可选地,在一些实施例中,触发式收缩机构包括:套环,套环在可摆脱吊钩与测试假人脱离后,接收可摆脱吊钩。
44.进一步地,如图3所示,图3为可摆脱吊钩及触发式收缩机构的原理示意图。其中,
⑦
为可摆脱式吊钩,
⑧
为测试假人撞飞后套环接收吊钩;
⑨
为触发式放大杠杆机构;
⑩
为测试假人悬吊吊环。
45.可选地,遮光式光电传感器系统400包括:遮光式光电传感器系统发射装置和遮光式光电传感器系统接收装置,其中,遮光式光电传感器系统发射装置和遮光式光电传感器系统接收装置相互通讯。
46.进一步地,如图4所示,图4为aebs测试时行人横穿测试系统的测试环境示意图。其中,为遮光式光电传感器系统发射装置;为遮光式光电传感器系统接收装置;为测试车辆;为测试道路。
47.下面结合图3至图5详细说明本实用新型实施例的aebs测试时行人横穿测试系统10。首先,接受测试规范,分析行人横穿场景相关参数;测试用例如图5所示。
48.场景参数计算如下:
49.(1)加速阶段用时1.5s;
50.(2)匀速阶段距离6.0m-1.5m=4.5m,速度6.5km/h,根据s=vt计算出匀速行驶时间为2.5s;
51.(3)需测试的测试车辆速度有20km/h,30km/h,40km/h,50km/h,60km/h;
52.(4)分析行人开始启动到到达目标位置的时间段(如例中1.5s+2.5s=4s),测试车辆距离横穿轨迹线距离分别为:22.2m,33.3m,44.4m,55.6m,66.7m;其次,给伺服电机编程,结核电机与导轨传动部分传动变速比,让导轨在前1.5s内移动1.5m,并加速到6.5km/h后匀速行驶;然后,针对需要测试的车速,根据(1)-(4)的计算将遮光式光电传感器系统—发射装置和遮光式光电传感器系统—接收装置分别布置在距离横穿轨迹线22.2m(20km/h工况),33.3m(30km/h工况),44.4m(40km/h工况),55.6m(50km/h工况),66.7m(60km/h工况)处,并调试发射装置与接收装置间的通讯,将反光板型光电开关第一次被遮挡信号输入给伺服电机,作为伺服电机启动信号;
53.将测试假人悬吊于可摆脱式吊钩
⑦
上,将测试假人撞飞后套环接收吊钩挂于
⑧
上(收紧拉索处于受力状态),调整调距螺杆使假人正好悬空,可摆脱式吊钩开口方向同车辆行驶方向,将杠杆放大机构设置于锁住待触发状态稳定;
54.开启伺服电机、遮光式光电传感器系统电源,测试车辆按测试工况行驶;
55.测试车辆到达设置的遮光式光电传感器系统位置时,光线被遮挡,系统发送遮挡信号给伺服电机系统,伺服电机开始工作;伺服电机拖动假人机构导轨按测试设置的行径轨迹运动,车辆继续按测试车速向假人横穿轨迹线行驶;
56.根据上述计算可知,如测试车辆未触发aebs系统,车辆行驶到假人横穿轨迹线时,假人正好处在设定的6m处位置,并在随后将假人撞飞,此步骤正好完成了假人启动的精确控制;
57.如假人被撞飞,假人悬吊套环
⑩
随碰撞力从可摆脱式吊钩
⑦
,滑动到触发式放大杠杆机构
⑨
,触发杠杆,释放接触,将假人撞飞后套环接收吊钩
⑧
与可摆脱式吊钩
⑦
分离,此时假人悬吊套环
⑩
滑入假人撞飞后套环接收吊钩
⑧
,并在假人回收弹索
④
的作用下拉起撞飞的假人,完成假人回收,防止测试车辆碾压到假人;
58.导轨带动假人系统移动到导轨限位位置,停止运动,试验结束。
59.根据本实用新型实施例提出的aebs测试时行人横穿测试系统,可以在速度控制系统根据行人横穿测试任务利用伺服电机控制导轨沿着横穿轨迹活动时,利用遮光式光电传感器系统预先设置的位置,匹配伺服电机触发的时机,使得可摆脱吊钩及触发式收缩机构在发生测试车辆与测试假人碰撞时与测试假人进行脱离。由此,解决了相关技术中aebs测试中行人横穿场景的假人控制过程中假人及设备易受损、碰撞时机精确控制等问题,仅使用机械结构完成被碰测试假人的防损回收,减少测试假人接触地面撞击时带来的摩擦力,不仅可以减少测试成本,且具备精准碰撞时机控制。
60.在本说明书的描述中,参考术语“一个实施例”、“一些实施例”、“示例”、“具体示例”、或“一些示例”等的描述意指结合该实施例或示例描述的具体特征、结构、材料或者特点包含于本实用新型的至少一个实施例或示例中。在本说明书中,对上述术语的示意性表述不必须针对的是相同的实施例或示例。而且,描述的具体特征、结构、材料或者特点可以在任一个或n个实施例或示例中以合适的方式结合。此外,在不相互矛盾的情况下,本领域的技术人员可以将本说明书中描述的不同实施例或示例以及不同实施例或示例的特征进行结合和组合。
61.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“n个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
62.流程图中或在此以其他方式描述的任何过程或方法描述可以被理解为,表示包括一个或更n个用于实现定制逻辑功能或过程的步骤的可执行指令的代码的模块、片段或部分,并且本实用新型的优选实施方式的范围包括另外的实现,其中可以不按所示出或讨论的顺序,包括根据所涉及的功能按基本同时的方式或按相反的顺序,来执行功能,这应被本实用新型的实施例所属技术领域的技术人员所理解。
63.应当理解,本实用新型的各部分可以用硬件、软件、固件或它们的组合来实现。在上述实施方式中,n个步骤或方法可以用存储在存储器中且由合适的指令执行系统执行的软件或固件来实现。如,如果用硬件来实现和在另一实施方式中一样,可用本领域公知的下列技术中的任一项或他们的组合来实现:具有用于对数据信号实现逻辑功能的逻辑门电路的离散逻辑电路,具有合适的组合逻辑门电路的专用集成电路,可编程门阵列(pga),现场可编程门阵列(fpga)等。
64.本技术领域的普通技术人员可以理解实现上述实施例方法携带的全部或部分步骤是可以通过程序来指令相关的硬件完成,所述的程序可以存储于一种计算机可读存储介质中,该程序在执行时,包括方法实施例的步骤之一或其组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1