一种高精度大水深水下工程定位系统的制作方法
1.本实用新型属于水下目标定位技术领域,具体涉及一种高精度大水深水下工程定位系统。
背景技术:
2.在水库大坝的修补加固等水下工程中,测量定位通常采用拉钢尺、吊垂线等传统方法;这类方法在水深较大时(例如水深50m以上)作业效率很低,而且易造成误差的积累。在使用水下机器人进行作业时,目前的定位精度也很难直接达到水下施工的精度要求。本方法既可提高水下定位的效率,又可提高水下定位的精度;在水深200m的情况下,定位精度可以达到厘米级,可以瞬间获取目标点的坐标位置和所处的水深(或高程)。
3.因此,现有技术有待进一步研究。
技术实现要素:
4.本实用新型的目的是提供一种高精度大水深水下工程定位系统,旨在解决上述背景中提及的技术问题。
5.为解决上述问题,本实用新型所采用的技术方案是:一种高精度大水深水下工程定位系统,包括两个水声定位装置、声信标、水位计、声速仪、惯性导航系统、测量装置及计算机;所述水声定位装置包括水听器、固定支架,所述固定支架一端固定在水面上方的水工建筑物上,另一端伸入水面以下用于固定水听器;所述声信标、水位计与惯性导航系统固定在位于水底的水底作业设备上;
6.所述测量装置,用于测量水声定位装置的位置和高程,由此计算出两水声定位装置之间的水平距离;
7.所述声信标,用于发射声波,所述水听器感应声波后,用于测量声信标至水声定位装置之间的距离;
8.所述水位计,用于测量水深;
9.所述声速仪,用于测量水体的声速剖面和温度剖面。
10.所述测量装置为全站仪或rtk系统。
11.所述固定支架伸入水面的一端与水平面的距离为1m-2m,所述固定支架之间的水平距离为15m-60m。
12.所述水听器之间的连线与水工建筑物的纵轴线平行。
13.所述电子罗盘仪,用于获取所述水底作业设备的姿态和航向。
14.本实用新型的有益效果是:
15.1.本实用新型的水声定位装置包括水听器、固定支架,以此作为水下测量的基准点;这种方式使水声定位装置处于稳定的静止状态,减少了水下定位的系统误差,而且便于使用陆地上的高精度测量工具测量定位基准点之间的相对位置;利用信标进行水下定位,信标的位置即为拟定位点的位置;在水平面上,以两定位基准点的连线为x轴,以其中一个
基准点为原点,以从水工建筑物指向水侧的方向为y轴建立局域坐标系,在局域坐标系中实时确定声信标的位置,即为拟定位点的位置;在水下工程的测量定位中,将定位基准点的选择与高精度的水声测距及高精度的水位计测深有机地结合在一起,能够实时精确确定目标点的位置。
16.2.本实用新型水听器之间的连线与水工建筑物的纵轴线平行,这样便于建立与水工建筑物水下轮廓相对应的局域坐标系,这会使操控人员感到更直观;水听器的安装位置位于水面以下1m-2m的位置,因此可以在水面以上安装,所有操作都是在水面以上进行。
17.3.本实用新型的声速仪,精确测量水体的声速剖面,据此,精确计算用于测距的声速,从而提高了测距的精度,实现了水下定位的高精度;使用声速仪测量水体的温度剖面,据此精确计算各水层的密度,使用高精度液压传感器(液位计)测量目的点处的水压力,由此提高了测深的精度;在水深为200m的情况下,水下定位的最大误差能够控制在厘米级。
附图说明
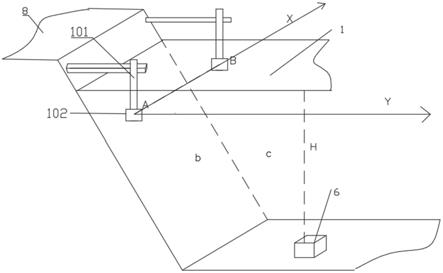
18.图1是定位系统水面原理示意图;
19.图2是定位系统立面原理示意图;
20.图3是定系统立体原理示意图;
21.图4是立体局域坐标系示意图。
22.图中:
23.1、水声定位装置;101、固定支架;102、水听器;2、声信标;3、水位计;5、惯性导航系统;6、作业设备;7、水面;8、水工建筑物。
具体实施方式
24.为能清楚说明本方案的技术特点,下面通过具体实施方式,并结合其附图,对本方案进行阐述。
25.如图1-4所示,一种高精度大水深水下工程定位系统,包括水声定位装置1、声信标2、水位计3、声速仪、惯性导航系统5、测量装置及计算机;所述水声定位装置1为两个,所述水声定位装置1包括水听器102、固定支架101,所述固定支架101一端固定在水面7上方的水工建筑物8上,另一端伸入水面7以下用于固定水听器102;所述声信标2、水位计3与惯性导航系统5固定在位于水底的作业设备6上;
26.所述固定支架101伸入水面7的一端与水平面的距离为1m-2m,所述固定支架101之间的水平距离为15m-60m。
27.所述水听器102之间的连线与水工建筑物8的纵轴线平行。
28.所述惯性导航系统5为电子罗盘仪或姿态传感器,用于获取所述水底作业设备6的姿态和航向。
29.所述测量装置,用于测量水声定位装置的的位置和高程,由此计算出两水声定位装置之间的水平距离;所述测量装置为全站仪或rtk系统。
30.所述水听器102所在的位置为位置a点与位置b点;所述位置a点与位置b点两点为水下定位基准点。
31.具体地,用全站仪或rtk系统精确测a、b两点的平面坐标和高程;利用全站仪、rtk
系统精确测出水平面7高程。
32.具体地,采用全站仪、rtk系统来测量位置a点与位置b点的相对位置d平面测量精度可以达到
±
(2.5+0.5
×
10-6
d)mm;高程测量精度可以达到
33.±
(5+0.5
×
10-6
d)mm。
34.所述声信标2,用于发射声波,所述水听器102感应声波后,利用水声学原理连续测量声信标2至水听器102的距离,即位置a点与位置b点之间的距离;
35.所述声速仪,使用声速仪精确测量水体的声速剖面,据此修正用于测距的声速值;
36.声速仪测量声速的精度可以达到0.10m/s,对于常温20℃常压条件下水中的声速1482.3m/s而言,声速仪的测量误差仅为0.67
×
10-4
v,其中v为实际声速,对声速进行修正后,水声定位装置1的测距误差可以控制在2.0
×
10-4
d以内;
37.使用声速仪分层测量水体的温度,测量精度可以达到0.1℃,据此计算各层水体的密度,以此修正水位计所测的水深。
38.所述水位计3,用于实时测量水深;
39.水位计的工作原理是测量水底的压力,以此来推算水位;其误差产生的原因主要是水温不同,水的密度就会不同,相同的水压所对应的水位就会存在差异,由此产生了与水深成比例的误差。本实用新型依据声速仪对水层温度的测量结果,计算各水层的相应密度,以此对水位计3所测的数据进行修正,修正后的测量误差可控制在0.01%以内。
40.采用这种定位方式的最大误差为:
41.[(0.02%b)2+(0.02%c)2+(0.01%h)2]
1/2
[0042]
其中b、c分别为定位点到a、b两点的距离;
[0043]
h为定位点到位置a、b两点所在水平面的垂直高度;
[0044]
如果定位点处的水深为200m,则h的最大值为199m;如果定位点距a、b两点的水平距离均为100m,则b、c分别为:
[0045]
(1992+1002)
1/2
=222.713(m)
[0046]
在水深200m、信标定位点距基准点222.713m的情况下,定位系统对信标定位的最大测量误差为:
[0047]
[(0.02%
×
222.713)2+(0.02%
×
222.713)2+(0.01%
×
199)2]
1/2
[0048]
=0.066(m)
[0049]
即最大定位误差为:6.6cm
[0050]
定位原理:
[0051]
在以位置a和位置b两基准点的连线为x轴,以其中位置a基准点为原点,以从水工建筑物8指向水侧的方向为y轴建立局域坐标系,如图所示,在局域坐标系中实时确定声信标2的位置即为定位点。其定位的几何原理是:定位点即为分别以基准点a、b为球心相应以b、c为半径的两球面相交所产生的弧线与基准点以下深度为h处的水平面的交点;b、c、h的数据是可以实时测定的,因此可以实时确定声信标的位置。
[0052]
以上所述只是本实用新型的优选实施方式,对于本技术领域的普通技术人员来说,在不脱离本实用新型原理的前提下,还可以做出若干改进和润饰,这些改进和润饰也被视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1