一种旋转平台碰摩信号激发装置
1.本技术涉及旋转机械故障模拟装置技术领域,尤其涉及一种旋转平台碰摩信号激发装置。
背景技术:
2.碰摩即碰撞与摩擦,现有的旋转机械中,随着对生产效率的要求提高,旋转机械正向着高性能、高效率、高参数发展,动静件间隙不断减小,从而使得碰摩的可能性不断增大,碰摩造成机器剧烈振动、磨损甚至破坏。其中旋转机械的转子与静子之间的碰摩是运行中的常见故障。为能有效的监测碰摩故障的发生,需要对碰摩信号进行分析。为了进行实验,需要设计碰摩信号的激发装置。根据碰摩的部位不同,可以分为径向与轴向碰摩。转轴的径向碰摩是高速旋转机械中的典型故障。中国专利cn201811145724.x公开了一种包含气动系统和碰摩系统的可测碰摩力的气动碰摩装置,通过跟换碰摩头可模拟不同材料碰摩情况。中国专利cn201610625416.1公开了一种利用可灵活拆卸的碰摩块进行局部碰摩的双转子实验台碰摩试验方法。
3.对于现有的碰摩激发装置,都是通过手动缩短碰摩螺钉等激发物与待接触轴的距离来激发碰摩信号,无法控制碰摩信号的输出强度,在实验过程中如果旋转机构转速过快或者碰摩螺钉与旋转机构接触时间过长导致碰摩螺钉等激发件的断裂,可能会影响测试人员的安全同时对测量机械也会造成一定的损伤。
技术实现要素:
4.本技术实施例提供了一种旋转平台碰摩信号激发装置,解决现有技术中通过手动缩短碰摩头等激发物与待接触旋转机构的输出轴的距离来激发碰摩信号,无法控制碰摩信号的输出强度以及实验安全的问题,所述技术方案如下:
5.根据一实施例提供的旋转平台碰摩信号激发装置,包括碰摩头、丝杠、驱动机构及缓冲机构,所述碰摩头的自由端与所述旋转平台上盛放的旋转机构的输出轴接触以产生碰摩信号;所述丝杠与所述碰摩头连接,且所述丝杠与所述碰摩头的轴向一致;所述驱动机构与所述丝杠连接,所述丝杠在所述驱动机构驱动下带动所述碰摩头在所述丝杠的轴向上移动,以使所述碰摩头与所述旋转机构的输出轴接触或分离;所述缓冲机构,位于所述碰摩头与所述丝杠之间,通过所述缓冲机构使得所述碰摩头与所述旋转机构的输出轴接触后产生回缩。
6.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,还包括:转换接头,所述转换接头的一端与所述丝杠连接,所述转换接头的另一端与所述碰摩头连接,以使所述碰摩头与所述丝杠实现同轴连接;其中,所述缓冲机构固设于所述转换接头内,且所述碰摩头远离所述自由端的一端与所述缓冲机构抵接,以使所述碰摩头与所述丝杠之间具有间距。
7.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,所述缓冲机构为减震
弹簧,所述碰摩头远离所述自由端的一端与所述减震弹簧抵接,以使所述碰摩头与所述旋转机构的输出轴接触后沿着从所述碰摩头指向所述丝杠的轴向方向回缩。
8.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,所述驱动机构为步进电机,所述丝杠穿设于所述步进电机上,在所述步进电机内设有与所述丝杠相配合的丝杠螺母,以驱动所述丝杠移动。
9.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,还包括:驱动器及控制器,所述驱动器与所述步进电机电连接,用于驱动和控制所述步进电机转动,实现对所述步进电机转速和转向的控制;所述控制器与所述驱动器电连接,用于向所述驱动器发送控制信号。
10.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,所述碰摩头与所述旋转平台上盛放的所述旋转机构的输出轴接触产生碰摩信号后,所述控制器向所述驱动器发送控制信号,由所述驱动器驱动所述步进电机反转,通过所述步进电机驱动所述丝杠沿背离所述旋转平台的方向移动以使所述碰摩头与所述旋转机构的输出轴分离。
11.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,还包括滑动机构,所述滑动机构包括基座、滑动部及连接头:所述基座包括底板和与所述底板垂直连接的侧板,所述步进电机设置于所述底板上,所述丝杠从所述底板穿出,在所述侧板上设有与所述丝杠平行的滑轨;所述滑动部位于所述滑轨上且与所述滑轨滑动配合;所述连接头的一端与所述滑动部连接,以使所述连接头沿所述滑轨移动,另一端与所述丝杠远离所述碰摩头的一端连接,以使所述丝杠在所述步进电机驱动下在所述丝杠的轴向上移动。
12.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,在所述连接头远离所述滑动部的一端设有螺纹孔,所述丝杠远离所述碰摩头的一端通过螺钉与所述螺纹孔固定连接。
13.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,还包括支撑结构,所述支撑结构包括支撑底座及支撑板,所述支撑底座位于所述旋转平台的两侧,并与所述旋转平台固定连接;所述支撑板连接两所述支撑底座,且所述支撑板位于所述旋转平台的正上方;其中,所述基座固设于所述支撑板上,所述丝杠穿出所述支撑板以使与所述丝杠连接的所述碰摩头与所述旋转平台上盛放的所述旋转机构的输出轴接触以产生碰摩信号。
14.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,所述支撑板的刚度小于所述支撑底座的刚度。
15.本技术一些实施例提供的一种旋转平台碰摩信号激发装置带来的有益效果为:本技术通过改变驱动机构旋转的速度实现碰摩信号不同强度的输出,解决了现有碰摩激发装置通过手动缩短碰摩头、碰摩螺钉等激发物与待接触旋转机构的输出轴的距离来激发碰摩信号,无法控制碰摩信号的输出强度的问题,在实验过程中,通过缓冲机构保证碰撞发生后的一段较短时间内,碰摩头能够回缩,避免碰撞过于激烈对旋转机构的输出轴造成损伤,也避免丝杠的断裂,保证实验时的安全。
附图说明
16.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本
申请的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
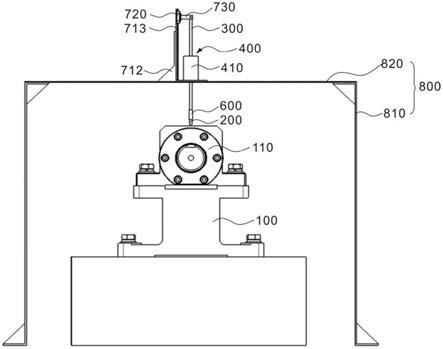
17.图1是本技术的旋转平台碰摩信号激发装置主视图;
18.图2是本技术的旋转平台碰摩信号激发装置侧视图;
19.图3是本技术的旋转平台碰摩信号激发装置俯视图;
20.图4是本技术的碰摩信号激发装置主视图;
21.图5是本技术的碰摩信号激发装置侧视图;
22.图6是本技术的碰摩信号激发装置立体图;
23.图7是本技术的转换头内部结构示意图;
24.图8是本技术的旋转平台碰摩信号激发装置原理图。
25.附图标记:100-旋转平台,110-旋转机构,200-碰摩头,300-丝杠,400-驱动机构,410-步进电机,500-缓冲机构,600-转换接头,700-滑动机构,710-基座,711-底板,712-侧板,713-滑轨,720-滑动部,730-连接头,731-螺纹孔,800-支撑结构,810-支撑底座,820-支撑板。
具体实施方式
26.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本技术一部分实施例,而不是全部的实施例。基于本技术中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本技术保护的范围。
27.除非另外定义,本公开使用的技术术语或者科学术语应当为本公开所属领域内具有一般技能的人士所理解的通常意义。本公开中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“包括”或者“包含”等类似的词语意指出现该词前面的元件或者物件涵盖出现在该词后面列举的元件或者物件及其等同,而不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,而是可以包括电性的连接,不管是直接的还是间接的。“上”、“下”、“左”、“右”等仅用于表示相对位置关系,当被描述对象的绝对位置改变后,则该相对位置关系也可能相应地改变。
28.根据一实施例提供的旋转平台碰摩信号激发装置,如图1-6所示,包括碰摩头200、丝杠300、驱动机构400及缓冲机构500,所述碰摩头200的自由端与所述旋转平台100上盛放的旋转机构110的输出轴接触以产生碰摩信号;所述丝杠300与所述碰摩头200连接,且所述丝杠300与所述碰摩头200的轴向一致;所述驱动机构400与所述丝杠300连接,所述丝杠300在所述驱动机构400驱动下带动所述碰摩头200在所述丝杠300的轴向上移动,以使所述碰摩头200与所述旋转机构110的输出轴接触或分离;所述缓冲机构500位于所述碰摩头200与所述丝杠300之间,通过所述缓冲机构500使得所述碰摩头200与所述旋转机构110的输出轴接触后产生回缩。根据上述实施例,本技术通过驱动机构400带动丝杠300沿所述丝杆300的轴向做直线往复运动,当丝杠300端部的碰摩头200以一定速度碰撞到旋转机构110表面,将在其表面产生碰摩信号,根据驱动机构400相对于旋转机构110的安装位置,合理设计驱动机构400的下移距离和速度。本技术可通过改变驱动机构400的旋转速度实现碰摩信号不同
强度的输出,减少碰摩实验中碰摩头200撞击对旋转机构100的伤害,通过缓冲机构500保证碰撞发生后的一段较短时间内,碰摩头200能够回缩,避免碰摩头200过多的运动对旋转机构100的输出轴以及丝杠300造成损伤。
29.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图7所示,还包括:转换接头600,所述转换接头600的一端与所述丝杠300连接,所述转换接头600的另一端与所述碰摩头200连接,以使所述碰摩头200与所述丝杠300实现同轴连接;其中,所述缓冲机构500固设于所述转换接头600内,且所述碰摩头200远离所述自由端的一端与所述缓冲机构500抵接,以使所述碰摩头200与所述丝杠300之间具有间距。其中,所述转换接头600的一端与所述丝杠300螺纹连接,根据上述实施例,通过转换接头600实现碰摩头200与丝杠300的同轴连接,保证丝杠300与碰摩头200实现同步轴向移动,通过缓冲机构500使得碰摩头200与所述丝杠300之间保持一定的间距,即碰摩头200与所述丝杠300之间不接触,从而避免碰摩头200与旋转机构100的输出轴碰撞后所产生的撞击力直接传导至丝杆300从而导致丝杆300断裂等情况的发生,本技术通过在碰摩头200与丝杠300之间设置缓冲机构500,保证碰撞发生后的一段较短时间内,碰摩头200能够回缩,避免碰摩头200过多的运动对旋转机构100的输出轴以及丝杠300造成损伤。
30.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图7所示,所述缓冲机构500为减震弹簧,所述碰摩头200远离所述自由端的一端与所述减震弹簧抵接,以使所述碰摩头200与所述旋转机构110的输出轴接触后沿着从所述碰摩头200指向所述丝杠300的轴向方向回缩。根据上述实施例,转换接头600的上半部分与丝杠300通过螺纹连接,下半部分通过减震弹簧抵住碰摩头200,当丝杠300朝向旋转平台100轴向移动时碰摩头200与旋转机构110的输出轴接触产生碰摩与摩擦的信号,减震弹簧的存在使得碰摩头200碰撞后能向上回弹一段,避免驱动机构400卡死,同时避免碰撞过于激烈对旋转机构110的输出轴造成损伤,也避免丝杠300的断裂,保证实验时的安全。
31.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图1-6所示,所述驱动机构400为步进电机410,所述丝杠300穿设于所述步进电机410上,在所述步进电机410内设有与所述丝杠300相配合的丝杠螺母,以驱动所述丝杠300移动。根据上述实施例,本技术选用步进电机410作为驱动机构400,利用步进电机具有很好的数据控制特性,便于使用计算机作为步进电机的驱动源,通过程序产生控制脉冲以驱动和控制步进电机410。
32.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图8所示,还包括:驱动器及控制器,所述驱动器与所述步进电机410电连接,用于驱动和控制所述步进电机410转动,实现对所述步进电机410转速和转向的控制;所述控制器与所述驱动器电连接,用于向所述驱动器发送控制信号。
33.具体地,所述碰摩头200与所述旋转平台100上盛放的所述旋转机构110的输出轴接触产生碰摩信号后,所述控制器向所述驱动器发送控制信号,由所述驱动器驱动所述步进电机410反转,通过所述步进电机410驱动所述丝杠300沿背离所述旋转平台100的方向移动以使所述碰摩头200与所述旋转机构110的输出轴分离。根据上述实施例,本技术通过程序控制保证碰摩头200与旋转机构110的输出轴碰撞发生后的一段较短时间内,步进电机410能快速反转,保证碰摩头200接触到旋转机构110的输出轴后立即回升,带动丝杠300及碰摩头200离开旋转结构110的表面,避免碰撞过于激烈对旋转机构110的输出轴造成损伤,
也避免丝杠300的断裂,保证实验时的安全。
34.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图4-6所示,还包括滑动机构700,所述滑动机构700包括基座710、滑动部720及连接头730:所述基座710包括底板711和与所述底板711垂直连接的侧板712,所述步进电机410设置于所述底板711上,所述丝杠300从所述底板711穿出,在所述侧板712上设有与所述丝杠300平行的滑轨713;所述滑动部720位于所述滑轨713上且与所述滑轨713滑动配合;所述连接头730的一端与所述滑动部720连接,以使所述连接头730沿所述滑轨713移动,另一端与所述丝杠300远离所述碰摩头200的一端连接,以使所述丝杠300在所述步进电机410驱动下在所述丝杠300的轴向上移动。其中,滑轨713通过螺栓连接安装于侧板712上,连接头730的一端通过螺钉安装于滑动部720上,滑轨713与丝杠300的轴向平行,根据上述实施例,丝杠300通过连接头730与滑轨713上的滑动部720连接,滑动部720可在滑轨713上上下移动,使得丝杆300在步进电机410的驱动下可沿丝杆300的轴向做直线运动。
35.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图4-6所示,在所述连接头730远离所述滑动部720的一端设有螺纹孔731,所述丝杠300远离所述碰摩头200的一端通过螺钉与所述螺纹孔731固定连接。具体地,在所述连接头730远离所述滑动部720的一端设有两个螺纹孔731,其中一螺纹孔731与丝杠300配合,另一螺纹孔731通过与之配合的螺钉达顶丝效果,进一步保证丝杠300固定而不发生旋转。根据上述实施例,通过在连接头730远离所述滑动部720的一端开设螺纹孔731,使用螺钉穿过所述螺纹孔731使得丝杠300的一端与连接头730的一端固定连接,保证丝杠300在步进电机410的驱动下不发生旋转而在竖直方向做直线运动,从而带动碰摩头200与旋转机构110的输出轴产生碰摩。
36.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,如图1-3所示,还包括支撑结构800,所述支撑结构800包括支撑底座810及支撑板820,所述支撑底座810位于所述旋转平台100的两侧,并与所述旋转平台100固定连接;所述支撑板820连接两所述支撑底座810,且所述支撑板820位于所述旋转平台100的正上方;其中,所述基座710固设于所述支撑板820上,所述丝杠300穿出所述支撑板820以使与所述丝杠300连接的所述碰摩头200与所述旋转平台100上盛放的所述旋转机构110的输出轴接触以产生碰摩信号。其中,基座710通过螺栓连接安装于支撑板820上,支撑底座810与旋转平台100通过t型块螺栓连接,旋转平台100左右两侧的2个支撑底座810与横向支撑板2通过螺钉连接。
37.例如,在一个实施例提供的旋转平台碰摩信号激发装置中,所述支撑板820的刚度小于所述支撑底座810的刚度。根据上述实施例,通过选用刚度比支撑底座810小的材料作为支撑板820,可以减少碰摩过程对旋转平台100造成的损伤过大,避免碰撞过程中的运动卡滞。
38.本技术的旋转平台碰摩信号激发装置,通过改变步进电机410旋转的速度实现碰摩信号不同强度的输出,解决了现有碰摩激发装置通过手动缩短碰摩头、碰摩螺钉等激发物与待接触旋转机构的输出轴的距离来激发碰摩信号,无法控制碰摩信号的输出强度的问题,在实验过程中,通过缓冲机构500以及控制器形成双层保险,保证碰撞发生后的一段较短时间内,碰摩头200能够回缩,控制器能够控制步进电机410反转,保证碰摩头200接触到旋转机构110的输出轴后立即回升,带动丝杠300及碰摩头200离开旋转结构110的表面,避免碰撞过于激烈对旋转机构110的输出轴造成损伤,也避免丝杠300的断裂,保证实验时的
安全。
39.尽管已经出于说明性目的对本技术的实施例进行了公开,但是本领域技术人员将认识的是:在不偏离如所附权利要求公开的本发明的范围和精神的情况下,能够进行各种修改、添加和替换。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1