一种可自动调节的X荧光色散分析仪光路系统的制作方法
一种可自动调节的x荧光色散分析仪光路系统
技术领域
1.本实用新型涉及一种工业物料成分在线分析领域,具体说涉及一种可自动调节的x荧光色散分析仪光路系统。
背景技术:
2.x射线荧光光谱分析是一种快速的、非破坏式的物质测量方法。x射线荧光是用高能量x射线或伽玛射线轰击材料时激发出的次级x射线。这种现象被广泛用于元素分析和化学分析,特别是在金属,玻璃,陶瓷和建材的调查和研究,地球化学,法医学,考古学和艺术品,例如油画和壁画。
3.x射线荧光光谱仪又称xrf光谱仪,分为色散型和非色散型两种。色散型又分为波长色散型和能量色散型。波长色散型荧光光谱仪是用分光晶体将荧光光束色散后,测定各种元素的特征x射线波长和强度,从而测定各种元素的含量。而能量色散型荧光光谱仪是借助高分辨率敏感半导体检查仪器与多道分析器将未色散的x射线荧光按光子能量分离x色线光谱线,根据各元素能量的高低来测定各元素的量,由于原理的不同,故仪器结构也不同。能量色散型荧光和波长色散型荧光折两种仪器,各有所有点和不足,它们只能互补,而不能替代。
4.波长色散型xrf光谱仪由x射线管激发源、分光系统、探测器系统、真空系统和气流系统等部分组成。根据分析晶体的聚焦几何条件不同,分为非聚焦反射平晶式、半聚焦反射弯晶式、全聚焦反射弯晶式、半聚焦透射弯晶式等。为了准确测量衍射光束与入射光束的夹角,分光晶体需安装在一个精密的测角仪上,还需要一庞大而精密并复杂的机械运动装置。
5.而如果只为了分析某一种元素的含量的时候,则无需测角仪,只要把分光晶体以合适的角度固定在分光系统中。由于波长色散分析仪的分光系统结构精密,目前属于适合在实验室分析的用途,而用在工业在线检测分析的话,由于有些工业生产现场的恶略条件,如环境温度变化波动大、存在持续的震动或震幅较大等,都严重影响了波长色散分析仪在工业现场应用的效果。
6.特别是波长色散分析仪在工业现场运行一段时间后,随着温度变化和震动等影响,导致分光晶体对x荧光的反射聚焦状态发生改变,使探测器接收到的有效x荧光强度降低,影响分析精度。目前对此类现象的维修手段就是工作人员拆开分析仪,使用手工调节,而又受到现场的潮气大、粉尘多、空间狭小等不利条件,导致调试工作非常困难。
技术实现要素:
7.针对目前系统所存在的不足,本实用新型提出一种可自动调节的x荧光色散分析仪光路系统。
8.本实用新型的具体内容为:
9.在分光壳体(101)的内部,安装四块遮挡块(102),安装晶体台(203);晶体座(202)通过轴销(204)与晶体台(203)连接,晶体座(202)能够以轴销(204)为中心转动;在晶体台
(203)上固定有弹簧片(205),弹簧片(205)的翘起部位顶在晶体座(202)的一端;晶体座(202)上固定有分光晶体(206);分光壳体(101)开有圆孔;晶体台(203)开有圆孔,晶体台(203)的圆孔与分光壳体(101)的圆孔是同心的,且晶体台(203)的圆孔的内径与分光壳体(101)的圆孔的内径相同;
10.伺服电机(401)与电动推杆(301)连接,伺服电机(401)与电动推杆(301)一起构成常规的伺服电动推杆;通过伺服电机(401)的顺时针方向或逆时针方向旋转,可以调节电动推杆(301)在分光壳体(101)内部空间里的长度;电动推杆(301)的在分光壳体(101)内部的一端接有顶头(303),顶头(303)为圆柱形,在不与电动推杆(301)连接的一端设为圆台形;顶头(303)与晶体台(203)的圆孔同心,且顶头(303)的外径小于晶体台(203)的圆孔的内径;
11.伺服电机(401)通过电缆与电机控制模块(404)连接,电机控制模块(404)为伺服电机(401)提供工作电源及接收信号、发送控制信号;
12.分光壳体(101)开有狭缝a(103)和狭缝b(104),x荧光从狭缝a(103)入射,经过分光晶体(206)的反射之后,从狭缝b(104)出射;分光壳体(101)连接有探测器(105),探测器(105)接收从狭缝b(104)出射的x荧光;探测器(105)通过电缆与信号处理器(106)连接,信号处理器(106)为探测器(105)提供工作电源及接收信号;
13.信号处理器(106)通过电缆与工控机(107)连接,信号处理器(106)将接收到探测器(105)的脉冲信号后,转换为计数率的数字信号传输给工控机(107);
14.电机控制模块(404)通过电缆与工控机(107)连接。
15.当需要将分光晶体(206)调整到最佳位置时,工控机(107)通过电机控制模块(404)控制伺服电机(401)的旋转,使晶体座(202)从极限位置1的状态逐渐变化到极限位置2的状态,在该过程中,伺服电机(401)的信号传输给电机控制模块(404),经过电机控制模块(404)转换为代表晶体座(202)不同位置的数字化信号后传输给工控机(107);同时信号处理器(106)将接收到探测器(105)的脉冲信号后,转换为计数率的数字信号传输给工控机(107);工控机(107)将数据处理成为谱形;
16.工控机(107)对谱形进行平滑处理,然后对平滑之后的谱形寻找最大值,最大值的横坐标位置n1所对应的晶体座(202)位置为最佳位置;工控机(107)通过电机控制模块(404)控制伺服电机(401)的旋转,使晶体座(202)的位置对应到n1即可。
17.有益效果:
18.通过采用本实用新型的内容进行实施,可以实现对光路的自动调节,自动将波长色散的光路调整到最佳状态,避免了因环境的温度变化、震动等不利因素影响造成的仪表分析精度降低,减少了维护的工作量,不用打开仪器装置进行手动调节。
附图说明
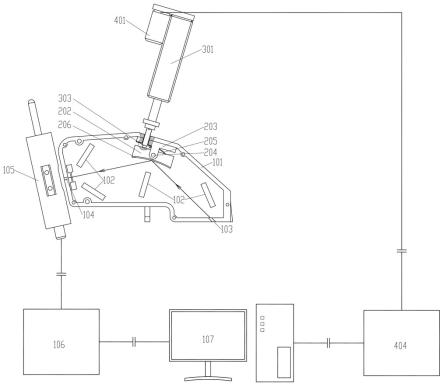
19.图1:分光器系统工作原理图
20.图2:晶体座局部放大图
21.图3:电动推杆、顶头局部放大图
22.图4:伺服电机、电动推杆和晶体座位置图
23.图5:晶体座极限位置1示意图
24.图6:晶体座极限位置2示意图
25.图中:101分光壳体,102遮挡块,103狭缝a,104狭缝b,105探测器,106信号处理器,107工控机,202晶体座,203晶体台,204轴销,205弹簧片,206分光晶体,301电动推杆,303顶头,401伺服电机,404电机控制模块。
具体实施方式
26.如图1所示,在分光壳体(101)的内部,安装四块遮挡块(102),安装晶体台(203);
27.如图1、图2所示,晶体座(202)通过轴销(204)与晶体台(203)连接,晶体座(202)能够以轴销(204)为中心转动;在晶体台(203)上固定有弹簧片(205),弹簧片(205)可用螺钉固定在晶体台(203)上,弹簧片(205)的翘起部位顶在晶体座(202)的一端;晶体座(202)上固定有分光晶体(206);
28.如图1、图2、图3、图4所示,分光壳体(101)开有圆孔;晶体台(203)开有圆孔,晶体台(203)的圆孔与分光壳体(101)的圆孔是同心的,且晶体台(203)的圆孔的内径与分光壳体(101)的圆孔的内径相同;
29.伺服电机(401)与电动推杆(301)一起构成常规的伺服电动推杆;通过伺服电机(401)的顺时针方向或逆时针方向旋转,可以调节电动推杆(301)在分光壳体(101)内部空间里的长度;电动推杆(301)的在分光壳体(101)内部的一端接有顶头(303),顶头(303)为圆柱形,在不与电动推杆(301)连接的一端设为圆台形;顶头(303)与晶体台(203)的圆孔同心,且顶头(303)的外径小于晶体台(203)的圆孔的内径;
30.伺服电机(401)通过电缆与电机控制模块(404)连接,电机控制模块(404)为伺服电机(401)提供工作电源及接收信号、发送控制信号;
31.如图1、图5、图6所示,伺服电机(401)通过电缆与电机控制模块(404)连接,电机控制模块(404)为伺服电机(401)提供工作电源及接收信号、发送控制信号;
32.伺服电机(401)与电动推杆(301)一起构成常规的伺服电动推杆;通过伺服电机(401)的顺时针方向或逆时针方向旋转,可以调节电动推杆(301)在分光壳体(101)内部空间里的长度;进而控制晶体座(202)可以处于极限位置1的状态到极限位置2的状态之间的各种状态;
33.分光壳体(101)开有狭缝a(103)和狭缝b(104),x荧光从狭缝a(103)入射,经过分光晶体(206)的反射之后,从狭缝b(104)出射;分光壳体(101)连接有探测器(105),探测器(105)接收从狭缝b(104)出射的x荧光;探测器(105)通过电缆与信号处理器(106)连接,信号处理器(106)为探测器(105)提供工作电源及接收信号;
34.信号处理器(106)通过电缆与工控机(107)连接,信号处理器(106)将接收到探测器(105)的脉冲信号后,转换为计数率的数字信号传输给工控机(107);
35.电机控制模块(404)通过电缆与工控机(107)连接。
36.当需要将分光晶体(206)调整到最佳位置时,工控机(107)通过电机控制模块(404)控制伺服电机(401)的旋转,使晶体座(202)从极限位置1的状态逐渐变化到极限位置2的状态,在该过程中,伺服电机(401)的脉冲信号传输给电机控制模块(404),经过电机控制模块(404)转换为代表晶体座(202)不同位置的数字化信号后传输给工控机(107);同时信号处理器(106)将接收到探测器(105)的脉冲信号后,转换为计数率的数字信号传输给工
控机(107);工控机(107)将数据处理成为谱形,谱形的横轴代表晶体座(202)不同位置,取值范围为1~n,其中极限位置1状态时对应为1,极限位置2状态时对应为n,n为晶体座(202)从极限位置1的状态逐渐变化到极限位置2的状态的过程中,伺服电机(401)所发出脉冲信号的个数;纵轴为晶体座(202)处于该位置状态下的计数率。
37.为避免涨落效应,工控机(107)对谱形进行平滑处理,具体的平滑公示为:
38.当1≤n≤5或n-5≤n≤n时,;
39.当5《n《n-5时,
40.;
41.其中为平滑之前谱形中道址为n的计数率,为平滑之后谱形中道址为n的计数率;
42.然后对平滑之后的谱形寻找最大值,找到max(),对应max()的道址数为n1,即有,则道址n1所对应的晶体座(202)位置为最佳位置,工控机(107)通过电机控制模块(404)控制伺服电机(401)的旋转,使晶体座(202)的位置的信号对应到n1即可。
43.其中:
44.探测器(105)为流气正比计数器;
45.伺服电机(401)选用m-link品牌,型号:jm-cp6224-m-e。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1