基于自动上料的检测平台的制作方法
1.本实用新型涉及半导体芯片检测装置技术领域,尤其是指一种基于自动上料的检测平台。
背景技术:
2.目前,对于led半导体芯片金线检测案例,金线作为芯片和外部电路主要的连接材料,更需有严谨的检测方案,本方案主要检测led半导体芯片上金线是否焊接合格,有无断线、跳线、锡液溢出等不良瑕疵。
3.但是检测过程中存在以下难点:
4.1、金线体积很小,且表面金属反光明显;
5.2、单一工位检测无法检测出多种不良情况,容易出现漏判情况;
6.3、人工在高倍显微镜下检测效益低,且人工易出现疲劳。
7.综上所述:本领域亟需一种检测平台,对led半导体芯片进行自动上料及检测。
技术实现要素:
8.针对现有技术的不足,本实用新型公开了一种基于自动上料的检测平台。
9.本实用新型所采用的技术方案如下:
10.一种基于自动上料的检测平台,包括
11.输送机构,包括两组非接触式驱动传送机构,所述非接触式驱动传送机构用于传输半导体芯片;
12.定位机构,设置在两组所述非接触式驱动传送机构之间,包括吸气板,所述吸气板的一侧安装挡料机构,用于限制半导体芯片移动;
13.第一直线模组,安装于所述输送机构的下方,用于驱动所述输送机构沿所述第一直线模组的安装方向移动;
14.第二直线模组,安装于所述第一直线模组的下方,用于驱动所述第一直线模组沿所述第二直线模组的安装方向移动。
15.其进一步的技术特征在于:所述非接触式驱动传送机构包括轨道调节侧板,所述轨道调节侧板的一侧安装多个传动轮,所述轨道调节侧板的另一侧安装非接触式传动元件、磁力转轮、传动轴和双出轴步进电机,所述传动轮和所述非接触式传动元件通过固定轴连接;所述磁力转轮套设在所述传动轴上,且所述传动轴分别连接所述双出轴步进电机的两侧输出轴,所述磁力转轮和所述非接触式传动元件之间通过磁力传动。
16.其进一步的技术特征在于:所述轨道调节侧板之上安装轨道压板,所述轨道压板沿所述轨道调节侧板的长度方向设置。
17.其进一步的技术特征在于:所述吸气板开设多个负压吸气口,且所述吸气板之下安装升降台,所述升降台连接升降气缸的活塞杆。
18.其进一步的技术特征在于:所述挡料机构包括滑台气缸,所述滑台气缸的活塞杆
连接滑台,所述滑台和连接元件固定连接,所述连接元件和挡料块固定连接,且所述连接元件安装于滑动模组上。
19.其进一步的技术特征在于:所述滑动模组包括第一滑块、第一导轨和固定元件,所述固定元件固定在所述滑台气缸的侧壁,所述第一滑块和所述第一导轨相互嵌合,所述第一导轨固定于所述固定元件之上。
20.其进一步的技术特征在于:还包括第一导向机构,所述第一导向机构安装于所述输送机构的下方;所述第一导向机构包括相互嵌合的第二滑块和第二导轨,所述第二滑块之上安装输送机构;所述第二滑块的运动方向和所述第一直线模组的运动方向相同。
21.其进一步的技术特征在于:还包括第二导向机构,所述第二导向机构安装于所述第一直线模组的下方;所述第二导向机构包括相互嵌合的第三滑块和第三导轨,所述第三滑块之上安装所述第一直线模组,所述第三滑块的运动方向和所述第二直线模组的运动方向相同。
22.本实用新型的有益效果如下:
23.1、本实用新型通过输送机构、定位机构、第一直线模组和第二直线模组之间的相互配合,检测金线锡珠情况,可代替人工检测,解决检测效益低下问题。
24.2、本实用新型通过设置第一导向机构和第二导向机构,控制输送机构或第一直线模组在行走过程中准确的导向定位,安装和调整方便,成本较低,且由于长时间运行导致磨损量较小。
25.3、本实用新型通过定位机构使半导体芯片固定在吸气板内,挡料机构进一步使半导体芯片固定在精确的位置上,保证检测精度。
附图说明
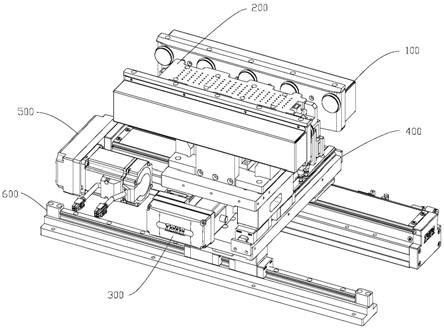
26.图1是本实用新型的第一视角的结构示意图。
27.图2是本实用新型的第二视角的结构示意图。
28.图3是本实用新型的部分爆炸图。
29.图4是本实用新型的使用示意图。
30.说明书附图标记说明:100、输送机构;101、传动轮;102、非接触式传动元件;103、磁力转轮;104、传动轴;105、第一电机;106、轨道压板;107、轨道调节侧板;108、防尘罩;200、定位机构;201、吸气板;202、挡料块;203、滑台;204、连接元件;205、第一滑块;206、第一导轨;207、固定元件;208、滑台气缸;300、第一直线模组;400、第一导向机构;401、第二滑块;402、第二导轨;500、第二直线模组;600、第二导向机构;601、第三滑块;602、第三导轨;700、相机;800、光源套筒。
具体实施方式
31.关本实用新型的前述及其他技术内容、特点与功效,在以下配合参考附图对实施例的详细说明中,将可清楚的呈现。以下实施例中所提到的方向用语,例如:上、下、左、右、前或后等,仅是参考附图的方向。因此,使用的方向用语是用来说明并非用来限制本实用新型,此外,在全部实施例中,相同的附图标号表示相同的元件。
32.下面结合附图,说明本实施例的具体实施方式。
33.结合图1~图3,一种基于自动上料的检测平台,包括
34.输送机构100,包括两组非接触式驱动传送机构,非接触式驱动传送机构用于传输半导体芯片。
35.定位机构200,设置在两组非接触式驱动传送机构之间,包括吸气板201,吸气板201的一侧安装挡料机构,用于限制半导体芯片移动。
36.第一直线模组300,安装于输送机构100的下方,用于驱动输送机构100沿第一直线模组300的安装方向移动。
37.第二直线模组500,安装于第一直线模组300的下方,用于驱动第一直线模组300沿第二直线模组500的安装方向移动。
38.非接触式驱动传送机构包括轨道调节侧板107,轨道调节侧板107的一侧安装多个传动轮101,轨道调节侧板107的另一侧安装非接触式传动元件102、磁力转轮103、传动轴104和双出轴步进电机105,传动轮101和非接触式传动元件102通过固定轴连接。磁力转轮103套设在传动轴104上,且传动轴104分别连接双出轴步进电机105的两侧输出轴,磁力转轮103和非接触式传动元件102之间通过磁力传动。
39.轨道调节侧板107之上安装轨道压板106,轨道压板106沿轨道调节侧板107的长度方向设置。
40.吸气板201开设多个负压吸气口,且吸气板201之下安装升降台,升降台连接升降气缸的活塞杆。升降气缸的活塞杆的伸出或收缩带动吸气板201上升或下降。
41.挡料机构包括滑台气缸208,滑台气缸208的活塞杆连接滑台203,滑台203和连接元件204固定连接,连接元件204和挡料块202固定连接,且连接元件204安装于滑动模组上。当半导体芯片放置在吸气板201之上时,可通过滑台气缸的活塞杆伸出带动挡料块202上升,挡料块202挡住半导体芯片的一侧,限制半导体芯片在第一直线模组300和第二直线模组500在运动过程中的移动。
42.滑动模组包括第一滑块205、第一导轨206和固定元件207,固定元件207固定在滑台气缸208的侧壁,第一滑块205和第一导轨206相互嵌合,第一导轨206固定于固定元件207之上。
43.还包括第一导向机构400,第一导向机构400安装于输送机构100的下方。第一导向机构400包括相互嵌合的第二滑块401和第二导轨402,第二滑块401之上安装输送机构100。第二滑块401的运动方向和第一直线模组300的运动方向相同。第一导向机构400保证输送机构100按第一直线模组300的轨迹运动。
44.还包括第二导向机构600,第二导向机构600安装于第一直线模组300的下方。第二导向机构600包括相互嵌合的第三滑块601和第三导轨602,第三滑块601之上安装第一直线模组300,第三滑块601的运动方向和第二直线模组500的运动方向相同。第二导向机构600保证第一直线模组300和第一导向机构400按照第二直线模组500的轨迹运动。
45.如图4所示,本实用新型的工作原理如下:
46.基于自动上料的检测平台的一侧安装相机700,相机700可以使用高精度500w彩色ccd相机,且基于自动上料的检测平台上方安装光源套筒800。相机700的镜头使用高精度12.5x高变倍比镜头,光源套筒800的光源搭配白色同轴和小角度小内径环形光源。
47.吸气板201承载半导体芯片,半导体芯片可通过负压吸附在吸气板201上,第一直
线模组300可以驱动输送机构100沿第一直线模组300的安装方向移动,第二直线模组500可以驱动第一直线模组300沿第二直线模组500的安装方向移动,将输送机构100传输至适当的位置,使得半导体芯片位于光源套筒800下方,通过相机700拍摄、从而检测半导体芯片上金线是否焊接合格。
48.第一直线模组300和第二直线模组500均为市售的直线滑台模组,由本领域的技术人员根据需要选择第一直线模组300和第二直线模组500的型号。
49.在本实用新型实施例的描述中,还需要说明的是,除非另有明确的规定和限定,若出现术语“设置”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域的普通技术人员而言,可以具体情况理解上述术语在本实用新型中的具体含义。
50.以上描述是对本实用新型的解释,不是对实用新型的限定,本实用新型所限定的范围参见权利要求,在不违背本实用新型的基本结构的情况下,本实用新型可以作任何形式的修改。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1