一种无接触水平定位装置的制作方法
1.本实用新型涉及pcb板定位技术领域,具体的涉及一种无接触水平定位装置。
背景技术:
2.21世纪电子行业飞速发展,其产品重要组件pcb板性能也不断提高,pcb板工艺要求也越来越高。pcb板,又称印刷电路板,其不仅是电子元器件的支撑体还是电气连接的载体。pcb板的定位,对于pcb板的后续加工尤为重要。
3.在现有的技术中,一般都是采用机械结构强行拍动pcb板,从而改变pcb板的位置,或者采用ccd(光学检测相机)拍照的方式来确认pcb板在空间中的位置。但上述方式存在的问题也较为明显,机械拍板会使pcb板与支撑面相对滑动摩擦,增加了pcb板被划伤的风险,而ccd检测会受外界环境因素的影响,比如有的pcb板在之前的工序中板角缺失或者板边存在透明区域,甚至现场光线不均匀都会导致ccd拍照定位不准确。
4.以上不足,有待改善。
技术实现要素:
5.为了克服现有的技术的不足,本实用新型提供一种无接触水平定位装置。
6.本实用新型技术方案如下所述:
7.一种无接触水平定位装置,包括:
8.气浮平台,所述气浮平台的表面设置有多个阵列分布的微气孔,所述气浮平台的背面设置有若干个阵列分布的与对应的所述微气孔连通的气浮吸盘,每一个所述气浮吸盘均与真空发生器连接;
9.拍正机构,所述拍正机构分布在所述气浮平台的四周;
10.传动机构,设置在所述气浮平台的下方,所述传动机构与所述拍正机构连接,并驱动所述拍正机构拍向所述气浮平台上的pcb板,将所述pcb板推送到指定位置。
11.根据上述方案的本实用新型,所述气浮平台的四周边缘均设置有若干个与所述拍正机构相配合的拍正导向槽。
12.进一步的,所述拍正机构包括若干个与所述拍正导向槽相配合的拍正柱和连接板,若干个所述拍正柱通过拍板支架固定在所述连接板上,所述连接板与所述传动机构的驱动端连接。
13.更进一步的,所述拍正柱上设置有用于感应所述pcb板的光纤感应器。
14.更一步的,所述拍正柱为耐磨防刮材质。
15.根据上述方案的本实用新型,所述传动机构包括x轴运动模组和y轴运动模组,所述x轴运动模组与x轴方向上的所述拍正机构连接,并驱动x轴方向上的所述拍正机构拍向所述气浮平台上的所述pcb板,所述y轴运动模组与y轴方向上的所述拍正机构连接,并驱动y轴方向上的所述拍正机构拍向所述气浮平台上的所述pcb板。
16.进一步的,所述x轴运动模组包括第一伺服电机、第一传动轴、第一正向丝杆、第一
反向丝杆、第一直线导向轴及安装底座,所述第一伺服电机与所述第一传动轴连接并驱动所述第一传动轴转动,所述第一传动轴的一端通过第一连轴器与所述第一正向丝杆连接,所述第一传动轴的另一端通过第二连轴器与所述第一反向丝杆连接,位于x轴方向其中一端的所述拍正机构通过第一丝杠滑块与所述第一正向丝杆螺纹连接,通过第一直线轴承与所述第一直线导向轴的一端滑动连接,位于x轴方向另一端的所述拍正机构通过第二丝杠滑块与所述第一反向丝杆螺纹连接,通过第二直线轴与所述第一直线导向轴的另一端滑动连接,所述第一伺服电机、所述第一连轴器、所述第二连轴器、所述第一直线导向轴均安装在所述安装底座上。
17.更进一步的,所述y轴运动模组包括第二伺服电机、第二传动轴、第二正向丝杆、第二反向丝杆及第二直线导向轴,所述第二伺服电机与所述第二传动轴连接并驱动所述第二传动轴转动,所述第二传动轴的一端通过第三连轴器与所述第二正向丝杆连接,所述第二传动轴的另一端通过第四连轴器与所述第二反向丝杆连接,位于y轴方向其中一端的所述拍正机构通过第三丝杠滑块与所述第二正向丝杆螺纹连接,通过第三直线轴承与所述第二直线导向轴的一端滑动连接,位于y轴方向另一端的所述拍正机构通过第四丝杠滑块与所述第二反向丝杆螺纹连接,通过第四直线轴与所述第二直线导向轴的另一端滑动连接,所述第二伺服电机、所述第三连轴器、所述第四连轴器、所述第二直线导向轴均安装在所述安装底座上。
18.更进一步的,所述第一伺服电机通过第一同步带装置与所述第一传动轴连接,所述第二伺服电机通过第二同步带装置与所述第二传动轴连接。
19.进一步的,所述x轴运动模组和所述y轴运动模组设置在所述气浮平台的下方,且所述x轴运动模组和所述y轴运动模组上下错位设置。
20.根据上述方案的本实用新型,所述气浮平台包括从上往下依次叠放的保护面板和支撑底板,所述保护面板上设置有多个阵列分布的第一微气孔,所述支撑底板上设置有多个与对应的所述第一微气孔相连通的第二微气孔,所述第一微气孔和所述第二微气孔形成所述微气孔。
21.进一步的,所述第一微气孔的直径小于所述第二微气孔的直径,形成上小下大的高压微气孔。
22.进一步的,所述第一微气孔的直径为1.0mm。
23.进一步的,所述保护面板为耐磨防刮材质,所述支撑底板为铝材质。
24.根据上述方案的本实用新型,所述气浮吸盘上设置有接头,所述气浮吸盘通过所述接头与所述真空发生器连接,所述真空发生器的前端设置有电气调整阀。
25.根据上述方案的本实用新型,本实用新型的有益效果在于:
26.1、本实用新型提供的定位装置通过气浮平台、拍正机构、传动机构对pcb板进行拍板定位,拍板定位过程中,气浮平台通过气浮模式让pcb板和台面之间形成空气薄膜,使pcb板悬浮于空中,到达无接触的理念,有效的避免了pcb板被划伤的风险;拍正后,气浮平台通过真空吸附模式,pcb板因吸真空吸附而固定在气浮平台上,防止机械手运动、平台运动、外界震动等因素导致pcb板在台面上移动,导致定位异常,有效的提高了pcb板的定位精度,避免出现ccd拍照定位不准确,导致pcb板位置出现偏差,影响pcb板的表面,降低生产效率;同时,提高了下游设备抓板精度,从而提高设备的生产效率;
27.2、传动机构采用上下错位设置的x轴运动模组和y轴运动模组,可以有效的减少装置设备的体积;同时x轴运动模组和y轴运动模组均采用一个伺服电机配合两条正反丝杠的驱动方式来实现拍正机构相对运动,从而使得pcb板4能够居中对齐,结构简单、运作稳定可靠,可以进一步提高pcb板的定位精度。
附图说明
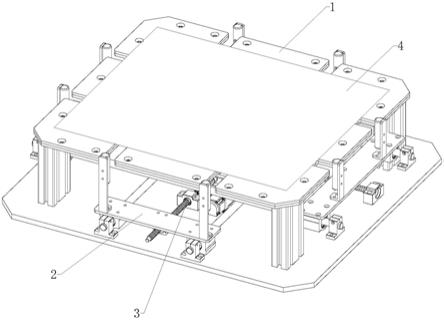
28.图1为本实用新型的结构示意图;
29.图2为本实用新型放有pcb板的结构示意图;
30.图3为本实用新型气浮模式的气体流向示意图;
31.图4为本实用新型真空吸附模式的气体流向示意图;
32.图5为本实用新型气浮平台的侧视图;
33.图6为本实用新型拍正机构的结构示意图;
34.图7为本实用新型传动机构的结构示意图。
35.在图中,
36.1、气浮平台;11、微气孔;12、气浮吸盘;1201、接头;13、保护面板;14、支撑底板;15、拍正导向槽;
37.2、拍正机构;21、拍正柱;2101、光纤感应器;22、连接板;23、拍板支架;
38.3、传动机构;31、x轴运动模组;3101、第一伺服电机;3102、第一传动轴;3103、第一正向丝杆;3104、第一反向丝杆;3105、第一直线导向轴;3106、安装底座;3107、第一同步带装置;3108、第一连轴器;3109、第二连轴器;3110、第一丝杠滑块;3111、第一直线轴承;3112、第二直线轴;32、y轴运动模组;3201、第二伺服电机;3202、第二传动轴;3203、第二正向丝杆;3204、第二反向丝杆;3205、第二直线导向轴;3206、第二同步带装置;3207、第三连轴器;3208、第四连轴器;3209、第三丝杠滑块;3210、第三直线轴承;3211、第四直线轴;
39.4、pcb板。
具体实施方式
40.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。
41.需要说明的是,术语“设置”、“连接”、“固定”、“安装”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。术语“上”、“下”、“左”、“右”、“前”、“后”、“顶”、“底”、“内”、“外”等指示的方位或位置为基于附图所示的方位或位置,仅是为了便于描述,不能理解为对本技术方案的限制。“多个”的含义是两个或两个以上,除非另有明确具体的限定。“若干个”的含义是一个或一个以上,除非另有明确具体的限定。
42.请参阅图1至图4,本实施例提供一种无接触水平定位装置,包括气浮平台1、拍正机构2及传动机构3。气浮平台1的表面设置有多个阵列分布的微气孔11,气浮平台1的背面设置有若干个阵列分布的与对应的微气孔11连通的气浮吸盘12,气浮吸盘12上设置有接头1201,气浮吸盘12通过接头1201与真空发生器连接,从而控制气浮平台1上的微气孔11进行
吹气和吸气达到控制pcb板4的效果。拍正机构2分布在气浮平台1的四周,传动机构3设置在气浮平台1的下方,传动机构3与拍正机构2连接,并驱动拍正机构2拍向气浮平台1上的pcb板4,将pcb板4推送到指定位置。
43.工作原理:将pcb板4放置在所述气浮平台1上,真空发生器通过真空和正压切换电磁阀切换至气浮模式,将气体的流向改为吹气的方式,气流通过气浮平台1上的微气孔11排出,使pcb板4与气浮平台1台面之间形成空气薄膜,到达pcb板4悬浮的效果,传动机构3驱动气浮平台1四周的拍正机构2将pcb板4推送到指定位置后,真空发生器通过真空和正压切换电磁阀切换至真空吸附模式,使得pcb板4因吸真空吸附而固定在气浮平台1的指定位置,防止机械手运动、平台运动、外界震动等因素导致pcb板4在台面上移动,导致定位异常。当定位装置使pcb板4定位后,下一道工序的设备来抓取pcb板4时,真空发生器停止吸气,从而使pcb板4与气浮平台1分离。
44.定位装置工作前,为了避免气体中存在杂质,需要对气源进行过滤和干燥,以防吹出的气流污染pcb板4。同时,针对不同批次不同厚度的pcb板4,真空发生器的前端设置有电气调整阀,可通过人工或者软件系统控制吹出的气流大小,调节气浮台悬浮力度大小,可以对厚板、薄板进行区分控制悬浮高度,从而达到不同厚度的pcb板4悬浮高度相同的效果。
45.本实用新型提供的定位装置通过气浮平台1、拍正机构2、传动机构3对pcb板4进行拍板定位,拍板定位过程中,通过气浮平台1让pcb板4和台面之间形成空气薄膜,使pcb板4悬浮于空中,到达无接触的理念,有效的避免了pcb板4被划伤的风险;提高了pcb板4的定位精度,避免出现ccd拍照定位不准确,导致pcb板4位置出现偏差,影响pcb板4的表面,降低生产效率;提高了下游设备抓板精度,从而提高设备的生产效率。
46.请参阅图5,气浮平台1包括从上往下依次叠放的保护面板13和支撑底板14,保护面板13、支撑底板14和多个气浮吸盘12通过螺丝固定在一起。保护面板13为耐磨防刮材质,如特氟龙材质,具有优秀的耐磨防刮效果,使用寿命长,且可以有效的防止pcb板4与支撑底板14直接撞击,起到保护的作用;支撑底板14为铝材质,具有易加工、强度高、耐蚀性好的优点。
47.保护面板13上设置有多个阵列分布的第一微气孔,支撑底板14上设置有多个与对应的第一微气孔相连通的第二微气孔。在本实施例中,第一微气孔的直径小于第二微气孔的直径,第一微气孔和第二微气孔形成上小下大的高压微气孔,第一微气孔的直径为1.0mm,气浮平台1吹气时经过微气孔11形成高速气流,使得pcb板4能够轻松的悬浮在气浮平台1上,且可以降低能源损耗。
48.请参阅图1,气浮平台1的四周边缘均设置有若干个与拍正机构2相配合的拍正导向槽15,拍正机构2沿着对应的拍正导向槽15即可进入气浮平台1,使得拍正机构2能够顺利拍向气浮平台1上的pcb板4。
49.请参阅图6,拍正机构2包括若干个与拍正导向槽15相配合的拍正柱21和连接板22,若干个拍正柱21通过拍板支架23固定在连接板22上,连接板22与传动机构3的驱动端连接,传动机构3通过连接板22驱动拍正柱21沿着对应的拍正导向槽15进入气浮平台1,使拍正柱21拍向气浮平台1上的pcb板4板边,从而将pcb板4推送到指定位置。同时,拍正柱21上设置有用于感应pcb板4的光纤感应器2101,防止拍正柱21用力过大损伤pcb板4。优选的,拍正柱21为耐磨防刮材质,具有优秀的耐磨防刮效果,使用寿命长,且可以避免拍正柱21拍向
pcb板4时,对pcb板4造成损坏,起到保护的作用。
50.请参阅图7,传动机构3包括x轴运动模组31和y轴运动模组32,x轴运动模组31与x轴方向上的拍正机构2连接,并驱动x轴方向上的拍正机构2拍向气浮平台1上的pcb板4,y轴运动模组32与y轴方向上的拍正机构2连接,并驱动y轴方向上的拍正机构2拍向气浮平台1上的pcb板4。同时,x轴运动模组31和y轴运动模组32设置在气浮平台1的下方,且x轴运动模组31和y轴运动模组32上下错位设置,可以有效的减少装置设备的体积。
51.具体的,x轴运动模组31包括第一伺服电机3101、第一传动轴3102、第一正向丝杆3103、第一反向丝杆3104、第一直线导向轴3105及安装底座3106,第一正向丝杆3103和第一反向丝杆3104螺纹方向相反,第一伺服电机3101通过第一同步带装置3107与第一传动轴3102连接并驱动第一传动轴3102转动,第一传动轴3102的一端通过第一连轴器3108与第一正向丝杆3103连接,第一传动轴3102的另一端通过第二连轴器3109与第一反向丝杆3104连接;位于x轴方向其中一端的拍正机构2通过第一丝杠滑块3110与第一正向丝杆3103螺纹连接,通过第一直线轴承3111与第一直线导向轴3105的一端滑动连接;位于x轴方向另一端的拍正机构2通过第二丝杠滑块与第一反向丝杆3104螺纹连接,通过第二直线轴3112与第一直线导向轴3105的另一端滑动连接;第一伺服电机3101、第一连轴器3108、第二连轴器3109、第一直线导向轴3105均安装在安装底座3106上,同时气浮平台1通过支撑柱固定在安装底座3106的上方。工作时,第一伺服电机3101通过第一传动轴3102带动第一正向丝杆3103和第一反向丝杆3104同步转动,因第一正向丝杆3103和第一反向丝杆3104螺纹方向相反,进而带动x轴方向两端的拍正机构2沿着第一直线导向轴3105相对运动,对pcb板4 x轴方向的两侧进行拍板。
52.y轴运动模组32包括第二伺服电机3201、第二传动轴3202、第二正向丝杆3203、第二反向丝杆3204及第二直线导向轴3205,第二正向丝杆3203和第二反向丝杆3204螺纹方向相反,第二伺服电机3201通过第二同步带装置3206与第二传动轴3202连接并驱动第二传动轴3202转动,第二传动轴3202的一端通过第三连轴器3207与第二正向丝杆3203连接,第二传动轴3202的另一端通过第四连轴器3208与第二反向丝杆3204连接;位于y轴方向其中一端的拍正机构2通过第三丝杠滑块3209与第二正向丝杆3203螺纹连接,通过第三直线轴承3210与第二直线导向轴3205的一端滑动连接;位于y轴方向另一端的拍正机构2通过第四丝杠滑块与第二反向丝杆3204螺纹连接,通过第四直线轴3211与第二直线导向轴3205的另一端滑动连接;第二伺服电机3201、第三连轴器、第四连轴器、第二直线导向轴3205均安装在安装底座3106上。工作时,第二伺服电机3201通过第二传动轴3202带动第二正向丝杆3203和第二反向丝杆3204同步转动,因第二正向丝杆3203和第二反向丝杆3204螺纹方向相反,进而带动y轴方向两端的拍正机构2沿着第二直线导向轴3205相对运动,对pcb板4 y轴方向的两侧进行拍板。x轴运动模组31和y轴运动模组32均采用一个伺服电机配合两条正反丝杠的驱动方式来实现拍正机构2相对运动,从而使得pcb板4能够居中对齐,且结构简单、运作稳定可靠,可以进一步提高pcb板4的定位精度。
53.应当理解的是,对本领域普通技术人员来说,可以根据上述说明加以改进或变换,而所有这些改进和变换都应属于本实用新型所附权利要求的保护范围。
54.上面结合附图对本实用新型专利进行了示例性的描述,显然本实用新型专利的实现并不受上述方式的限制,只要采用了本实用新型专利的方法构思和技术方案进行的各种
改进,或未经改进将本实用新型专利的构思和技术方案直接应用于其它场合的,均在本实用新型的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1