顶板平整度测量装置的制作方法
1.本实用新型属于测量设备领域,尤其涉及一种顶板平整度测量装置。
背景技术:
2.随着建筑水平的进步,对于建筑物顶板平整度的要求越来越高,但是现有的建筑物顶板平整度的测量,通常需要人为去移动测量仪位置才能测量各点的位置然后再进行评估,测量费时费力,每次移动也需要重新找水平基准,而且容易有误差,为此,人们需要找到更好的方法进行测量。
技术实现要素:
3.本实用新型所要解决的技术问题是提供一种顶板平整度测量装置。
4.本实用新型是通过以下技术方案来实现的:
5.顶板平整度测量装置,包括底座支架和设置在底座支架上的可相对底座支架旋转的测量仪,所述测量仪上设置有激光线感应器和垂直度传感器,所述测量仪的顶部设置有测距装置,与所述激光线感应器相配合地,在测量仪上设有基准零位。
6.作为优选,所述测量仪上还设有显示屏。
7.作为优选,所述测量仪的旋转通过在底座支架上设置电机进行驱动旋转或通过设置在可相对底座支架转动的支架上而进行旋转。
8.更优地,所述测量仪先设置在一个圆盘上,所述圆盘由电机驱动转动进而带动测量仪转动。
9.更优地,所述支架通过可调节角度的连接头与所述测量仪相连接。
10.更优地,所述支架通过蜗轮蜗杆结构与底座支架连接而实现可相对底座支架转动。进一步地,所述支架先设置在一个圆盘上,所述圆盘由蜗轮蜗杆结构驱动转动进而带动支架、测量仪转动。
11.本实用新型的有益效果是:
12.本实用新型的顶板平整度测量装置,结构巧妙,通过激光线感应器可自动探测水平激光线高度,在稳定接收到水平高度后,自动开始高度测量;通过垂直度传感器可自动判断垂直度,故在最后计算时可自动修正倾斜误差;而正因为垂直度传感器的存在,仪器倒转后可自动判断,确定是测顶面还是地面;而且,因为测量仪可相对底座支架旋转,故可以不移动仪器,依靠垂直度传感器的角度值,分判测量,由此在一个点即可准确测量和计算出多点的高度值,实用性强,值得推广。
附图说明
13.为了易于说明,本实用新型由下述的具体实施例及附图作以详细描述。
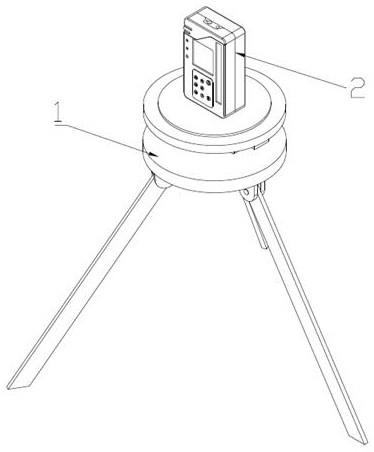
14.图1为本实用新型实施例1的立体结构示意图;
15.图2为本实用新型实施例2的立体结构示意图;
16.图3为图2的主视结构示意图;
17.图4为测量仪的立体结构示意图;
18.图5为测量仪处于垂直位且水平激光线低于基准零位时的测试示意图;
19.图6为测量仪与垂直方向呈α夹角且水平激光线低于基准零位时的测试示意图;
20.图7为将测量仪进行旋转而在一个位置通过变化倾斜角度而测量多个点位的高度时的测试示意图;
21.图8为当事先给测量仪一个相对于垂直线一个倾斜角并将测量仪进行变换水平位置的旋转而测量多个点位的高度时的测试示意图;
22.图9为图8中的部分结构细节图。
具体实施方式
23.实施例1
24.如图1和4所示,顶板平整度测量装置,包括底座支架1和设置在底座支架1上的可相对底座支架1旋转的测量仪2,所述测量仪2上设置有激光线感应器3和垂直度传感器,所述测量仪2的顶部设置有测距装置4,与所述激光线感应器3相配合地,在测量仪2上设有基准零位。
25.所述测量仪2上还设有显示屏5。
26.所述测量仪2的旋转通过在底座支架1上设置电机进行驱动旋转。具体地,所述测量仪2先设置在一个圆盘上,所述圆盘由电机驱动转动进而带动测量仪2转动。
27.实施例2
28.如图2、3和4所示,其它特征同实施例1,所述测量仪2的旋转通过设置在可相对底座支架1转动的支架6上而实现旋转。
29.所述支架6通过可调节角度的连接头7与所述测量仪2相连接。
30.所述支架6通过蜗轮蜗杆结构8与底座支架1连接而实现可相对底座支架1转动。具体地,所述支架6先设置在一个圆盘上,所述圆盘由蜗轮蜗杆结构8驱动转动进而带动支架、测量仪2转动。
31.如图5-9所示,使用方法:
32.由水平仪发出水平激光线。
33.当激光线感应器连续检测到水平激光线一定时间后,测距装置开始自动测量;作为优选,连续检测到水平激光线的时间为3秒;
34.如图5所示,当测量仪处于垂直位时,水平激光线低于基准零位时,顶板的垂直高度
△
h=测距装置测量出的高度h+水平激光线高度与基准零位之间的距离l;
35.当测量仪处于垂直位时,水平激光线高于基准零位时,顶板的垂直高度
△
h=测距装置测量出的高度h-水平激光线高度与基准零位之间的距离l;
36.如图6所示,当测量仪与垂直方向呈α夹角时,水平激光线低于基准零位时,顶板的垂直高度
△
hv=(测距装置测量出的高度h﹡cosα+水平激光线高度与基准零位之间的距离l﹡cosα;
37.当测量仪与垂直方向呈α夹角时,水平激光线高于基准零位时,顶板的垂直高度
△
hv=测距装置测量出的高度h﹡cosα-水平激光线高度与基准零位之间的距离l﹡cosα;
38.如图7所示,当将测量仪进行旋转而在一个位置通过变化倾斜角度而测量多个点位的高度时,且水平激光线低于基准零位时,各点位的测量结果为:顶板的垂直高度
△
hv=测距装置测量出的高度h﹡cosα﹢水平激光线高度与基准零位之间的距离l﹡cosα,其中α为各点位被测量时测距仪与垂直线之间的夹角;
39.当将测量仪进行旋转而在一个位置通过变化倾斜角度而测量多个点位的高度时,且水平激光线高于基准零位时,各点位的测量结果为:顶板的垂直高度
△
hv=测距装置测量出的高度h﹡cosα-水平激光线高度与基准零位之间的距离l﹡cosα,其中α为各点位被测量时测距仪与垂直线之间的夹角;
40.如图8和9所示,当事先给测量仪一个相对于垂直线一个倾斜角并将测量仪进行变换水平位置的旋转而测量多个点位的高度时,且水平激光线低于基准零位时,各点位的测量结果为:顶板的垂直高度
△
hv=测距装置测量出的高度h﹡cosα﹢水平激光线高度与基准零位之间的距离l﹡cosα,其中α为测量仪初始与垂直线之间的夹角。
41.当事先给测量仪一个相对于垂直线一个倾斜角并将测量仪进行变换水平位置的旋转而测量多个点位的高度时,且水平激光线高于基准零位时,各点位的测量结果为:顶板的垂直高度
△
hv=测距装置测量出的高度h﹡cosα-水平激光线高度与基准零位之间的距离l﹡cosα,其中α为测量仪初始与垂直线之间的夹角。
42.本实用新型的顶板平整度测量装置,结构巧妙,通过激光线感应器可自动探测水平激光线高度,在稳定接收到水平高度后,自动开始高度测量;通过垂直度传感器可自动判断垂直度,故在最后计算时可自动修正倾斜误差;而正因为垂直度传感器的存在,仪器倒转后可自动判断,确定是测顶面还是地面;而且,因为测量仪可相对底座支架旋转,故可以不移动仪器,依靠垂直度传感器的角度值,分判测量,由此在一个点即可准确测量和计算出多点的高度值,实用性强,值得推广。
43.以上所述,仅为本实用新型的具体实施方式,但本实用新型的保护范围并不局限于此,任何不经过创造性劳动想到的变化或替换,都应涵盖在本实用新型的保护范围之内。因此,本实用新型的保护范围应该以权利要求书所限定的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1