一种便携六面体热式空间风矢测量装置的制作方法
1.本实用新型属于环境气象测量仪器技术领域,具体涉及一种便携六面体热式空间风矢测量装置。
技术背景
2.风速、风向是反映环境气象信息的重要参数,对环境监测、空气调节和工农业的生产有重要影响,室内通风状况直接影响居民生活的安全性和舒适性,风环境的设计是现代建筑设计的一项重要内容。此外,新能源的发展已成为现如今社会解决能源危机的必由之路,而风能是新型能源中最容易被人类利用和开发的能源之一,如何做到自然风资源利用的最大化,已成为世界上一个公认的难题。因此快速准确地测量出风矢大小和方向从而实现对风环境的监测以及对风资源更加高效地利用,具有重要的实际意义。
3.现有技术中,较多的风矢测量装置有风杯与风标式组成一体式风矢测量仪器,基于超声波时差原理的风矢传感器,以及基于压力传感器的风矢测量仪器等。风杯与风标式的传感器因为需要机械转动,容易受摩擦力及外界不良环境的干扰,无法在冰冻等极端环境进行测量,测量环境要求比较严苛,同时测量精度也得不到有效保证。超声波形式的传感器灵敏度较高,测量速度快,但如果风速不是水平方向,由于重力的存在,空气的涡流及狭窄通道所带来的影响,可能会导致测量误差增大。压变风速传感器存在多种结构,比如扭力式、弹簧式,转轴式等,这些测量形式由于存在较多的弹性结构系统,在野外使用时会因为气流不稳定而发生涡振,地面传导的各种震动也会因为弹性结构的存在而被放大,从而降低了系统的抗干扰能力与测量精确度,特别是高风速条件下所产生的剧烈振动可能会极大地影响测量结果,甚至会给传感器造成不可逆的损坏。
4.cn 203224508 u提供一种三维风速风向测量系统,但是该技术存在以下缺点:装置的结构紧密程度不够,长期使用会导致测点发生偏移,从而影响测量的精度;装置无法在强风条件下工作,由于装置整体结构比较松散,较大风速会使得装置的测点发生偏移,无法测得实际xyz方向的压差,从而无法得到正确的实际风矢;装置受到测点结构及安装位置的影响,受风时测得的风矢分量与实际分量存在偏差,需要进行修正才能合成得到实际风矢;装置采用皮托管进行压差测量的原理换算得到风速,由于皮托管的灵敏度较低,故无法测量微风环境下的风矢。
5.cn 110031650 a公开了一种热温差型风速风向测量装置及方法,但是该技术存在以下缺点:由于结构限制,只能测量二维风矢,无法测量三维风矢(垂直分量);装置利用主动测温,环境温度会对其测量结果造成较大影响,即使在相同风速条件下,测量结果也会随着温度变化而产生较大的波动,存在较为明显测量误差。
6.cn206756870u提供一种球形三维多功能风速测量仪,但是该技术存在以下缺点:装置采用压力传感器阵列测量,小车移动以及大风速条件下造成的振动对压力传感器测量精度会造成较大影响;装置底部遮挡区域过大,对实际风场分布会造成较大的影响;装置便携度不够高,不易存放,保护。装置部件损坏更换成本高。
7.cn 203350271 u提供一种三维风速仪,但是该技术存在以下缺点:叶片转动测量风速,由于机械转动,会造成较大误差;叶片的转速和风速的映射关系随着叶片转速大小发生变化,三个风速的简单合成得到实际风矢会造成较大误差;装置正向和逆向测量由于结构的遮蔽,无法完全对称,反向测量时测量结果需要进行修正。
技术实现要素:
8.本实用新型提供一种风速风向测量装置,以克服上述装置存在的问题。
9.具体的技术方案为:
10.一种便携六面体热式空间风矢测量装置,包括底座式支座、正方体基座、空间风矢测量组件、夹持式支座;
11.所述的底座式支座包括底座杆、上固定环、上铰链座、下活动环、下铰链座、活动杆、主动杆、插销孔、连动杆和支撑架;底座杆的上部安装上固定环,四个上铰链座固定在上固定环上,四个活动杆通过铰链与上铰链座连接,底座杆的下部安装下活动环,四个下铰链座固定在下活动环上,四个主动杆通过铰链与下铰链座连接,且与活动杆的中部连接,连动杆的末端采用在插销孔设置插销的方式与活动杆连接,首端安装在支撑架上;
12.所述的正方体基座包括正六面体、螺纹槽和安装槽,螺纹槽设在正六面体在顶点处,六个安装槽设在正六面体的各面中心处;
13.所述的空间风矢测量组件包括二维热线探头、导风管、第一伸缩杆、第二伸缩杆和第三伸缩杆;二维热线探头安装在导风管内部,导风管的底座安装固定在第一伸缩杆上,第一伸缩杆安装在第二伸缩杆内部,第二伸缩杆安装在第三伸缩杆内部,所述的二维热线探头的头部形状为锥状,导风管为贯通空腔。
14.所述的夹持式支座包括螺纹内套筒、螺纹外套筒、螺纹柱、调节旋钮、上夹持板、下夹持板和防滑胶垫;螺纹内套筒的外螺纹和螺纹外套筒的内螺纹配合,螺纹柱的内螺纹和螺纹外套筒配合,螺纹柱固定在下夹持板上,且防滑胶垫固定在螺纹柱上,调节旋钮和螺纹外套筒配合,且调节旋钮通过卡扣和上夹持板配合,所述的调节旋钮能够在螺纹柱上配合,使上夹持板平行于下夹持板作移动。
15.正方体基座通过螺纹槽与底座式支座的底座杆进行安装,或者,与夹持式支座的螺纹内套筒进行配合;
16.六个空间风矢测量组件安装在正方体基座的安装槽中,第三伸缩杆在安装槽中可进行转动且通过插销定位。
17.本实用新型具体的技术效果:
18.(1)利用其结构对称性(正方体结构)实现快速、准确的三维风矢测量;
19.(2)利用热式测温原理能够实现微风条件下的风矢测量;
20.(3)模拟仿真实验提高了风矢映射精度,保证了装置的可实现性;
21.(4)可伸缩折叠杆结构提高了测量装置的便携性;
22.(5)整体结构的组件化设计很好地保证了测量装置的稳定性、准确性与快速性;
23.(6)可拆卸、可更换式底座设计保证了测量装置能够很好地适应不同的工作环境,拓宽了装置的使用范围。
附图说明
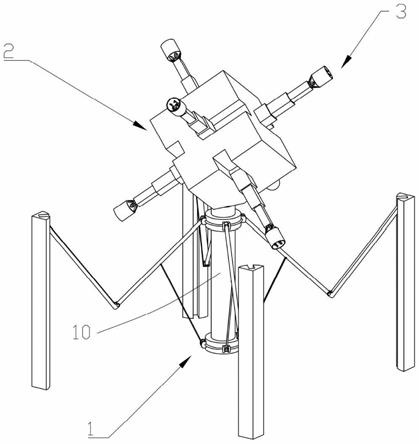
24.图1是本实用新型所述空间风矢测量装置的示意图;
25.图2是本实用新型所述支座式底座的示意图;
26.图3是本实用新型所述正方体风矢组件的示意图;
27.图4是本实用新型所述夹持式底座的示意图;
28.图5是实施例的导管迎风剖面图;
29.图6是实施例的实际风矢和测点风速之间的映射关系拟合结果;
30.图7是实施例的算法流程图;
31.图8是实施例的使用方法流程示意图。
32.图中:1.底座式支座,2.正方体基座,3.空间风矢测量组件,4.夹持式支座,10,底座杆,11.上固定环,12.上铰链座,13.下活动环,14,下铰链座,15.活动杆,16.主动杆,17.插销孔,18.连动杆,19.支撑架,20.正六面体,21.螺纹槽,22.安装槽,30.二维热线探头,31.导风管,32.第一伸缩杆,33.第二伸缩杆,34.第三伸缩杆,40.螺纹内套筒,41.螺纹外套筒,42.螺纹柱,43.调节旋钮,44.上夹持板,45.下夹持板,46.防滑胶垫。
具体实施方式
33.下面结合附图对本实用新型做进一步的说明:
34.根据图1-图4所示本实用新型提供一种便携六面体热式空间风矢测量装置,包括底座式支座1、正方体基座2、空间风矢测量组件3、夹持式支座4;
35.如图2所示,所述的底座式支座1包括底座杆10、上固定环11、上铰链座12、下活动环13、下铰链座14、活动杆15、主动杆16、插销孔17、连动杆18和支撑架19;底座杆10的上部安装上固定环11,四个上铰链座12固定在上固定环11上,四个活动杆15通过铰链与上铰链座12连接,底座杆10的下部安装下活动环13,四个下铰链座14固定在下活动环13上,四个主动杆16通过铰链与下铰链座14连接,且与活动杆15的中部连接,连动杆18的末端采用在插销孔17设置插销的方式与活动杆15连接,首端安装在支撑架19上;
36.所述的正方体基座2包括正六面体20、螺纹槽21和安装槽22,螺纹槽21设在正六面体20在顶点处,六个安装槽22设在正六面体20的各面中心处;
37.如图3所示,所述的空间风矢测量组件3包括二维热线探头30、导风管31、第一伸缩杆32、第二伸缩杆33和第三伸缩杆34;二维热线探头30安装在导风管31内部,导风管31的底座安装固定在第一伸缩杆32上,第一伸缩杆32安装在第二伸缩杆33内部,第二伸缩杆33安装在第三伸缩杆34内部,所述的二维热线探头30的头部形状为锥状,导风管31为贯通空腔。
38.如图4所示,所述的夹持式支座4包括螺纹内套筒40、螺纹外套筒41、螺纹柱42、调节旋钮43、上夹持板44、下夹持板45和防滑胶垫46;螺纹内套筒40的外螺纹和螺纹外套筒41的内螺纹配合,螺纹柱42的内螺纹和螺纹外套筒41配合,螺纹柱42固定在下夹持板45上,且防滑胶垫46固定在螺纹柱42上,调节旋钮43和螺纹外套筒41配合,且调节旋钮43通过卡扣和上夹持板44配合,所述的调节旋钮43能够在螺纹柱42上配合,使上夹持板44平行于下夹持板45作移动。
39.正方体基座2通过螺纹槽21与底座式支座1的底座杆10进行安装,或者,与夹持式支座4的螺纹内套筒40进行配合;
40.六个空间风矢测量组件3安装在正方体基座2的安装槽22中,第三伸缩杆34在安装槽22中可进行转动且通过插销定位。
41.本实用新型测量装置在工作时,底座式支座1和夹持式支座4是可根据实际需要进行拆卸更换的便捷式移动支架,正方体风矢组件置于被测点准备测量,分别伸展收纳于正方体基座2的安装槽22内的六个空间风矢测量组件3,空间风矢测量组件3的长度可根据实际测量环境风速大小进行调整,但在具体测量时,为了得到通过几何计算关系得到准确的测量结果,要保持六个空间风矢测量组件3处于同一伸缩长度状态,正方体风矢组件与底座连接方式为螺纹连接,具有可拆卸和可更换的特性,以适应不同的测量场合需求。
42.本实用新型便携六面体热式空间风矢测量装置使用方法,如图8所示,包括以下步骤:
43.第一步,装置的安装与固定。将六面体热式空间风矢测量装置置于被测点准备测量,分别伸展收纳于正方体主体结构内的六根可伸缩测量杆,测量杆长度可根据实际测量环境风速大小进行调整,但在具体测量时,为了得到通过几何计算关系得到准确的测量结果,要保持六根测量杆处于同一伸缩状态。传感器主要测量部分与底座连接方式为螺纹连接,具有可拆卸和可更换的特性,能够根据实际环境条件选择固定夹持式底座或水平放置式底座以适应不同的测量场合需求。
44.第二步,测量主体迎风。在测量阶段,六根具有相同的构造的伸缩杆顶端圆柱形导管口将会处于迎风状态,由圆柱形导管将风导入到测量末端的热线式风速传感器,利用热线恒温测量风速原理各导管对内测点风速大小反馈电信号,所反馈电信号由伸缩杆内导线传递至装置主体部分,主体内配有热线测温电路、a/d转换、zigbee无线传输、电源等模块,可将六个传感器所反馈的六个即时风速信号进行a/d转换后通过无线传输的方式传输至计算机进行后续处理。
45.第三步,数据的预处理。从装置主体结构来看,六个位于伸缩杆端部的传感器构成了一个正八面体,在空间直角坐标系中构成了八个象限。各传感器测得的风速大小与实际风速大小以及实际风矢与传感器所在坐标轴夹角大小有关,在某一个特定的迎风环境下,传感器处所测得的风速将会随着实际风矢与传感器所在轴夹角大小改变而改变,通过实验验证,可取六组反馈数据中的三组最大测量风速作为实际风矢的计算数据。
46.第四步,模型建立。如前所述,本装置各测点具有三维空间对称特性,为了减少仿真实验复杂度,降低实验成本,可只考虑单一测量末端的迎风情况,其他测量末端同理。同样地,考虑到圆柱导管关于中轴线对称的特殊结构,将圆柱进一步抽象为二维剖面结构进行迎风分析与仿真实验。为了方便表述与后续实验数据记录,对于一个二维的测量末端,如图5所示,以迎风管内测点m作为极点,以矩形中轴线为极轴建立二维平面内的极坐标系。由此,实际风矢表示为其中ra为实际来风大小,θa为来风相对于矩形中轴线的夹角,测点风矢表示为其中rb为测得风速大小,θb=0表示测点风向与矩形中轴线平行。
47.假设六组数据中最大的三组风速数据分别来自测点m1,m2,m3,若要使三组计算风矢共同表示
48.一实际风矢,在三维直角坐标系中必然有以下关系:
[0049][0050]
式中,r
ai
表示实际风矢大小,θ
ai
表示实际风矢与第i个测点所在极轴夹角。
[0051]
第五步,仿真实验与模型的求解
[0052]
实际风矢和测点风速之间的映射关系通过仿真实验所得数据进行多项式拟合确定,结果如图6所示:
[0053]
rb=(p1*θ7+p2*θ6+p3*θ5+p4*θ4+p5*θ3+p6*θ2+p7*θ1+p8)*ra/10
[0054]
等价于,
[0055]
ra=10*rb/(p1*θ7+p2*θ6+p3*θ5+p4*θ4+p5*θ3+p6*θ2+p7*θ1+p8)=fb(θ)
ꢀꢀ
(2)
[0056][0057]
(goodness of fit:sse:4.211r-square:0.99adjusted r-square:0.9846rmse:0.5691)算法流程如图7所示,在实际计算中,rb为测点风速已知,故上式可表示为:
[0058]
θ=arcfb(ra)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0059]
将上式代入(2)有,
[0060][0061]
便可解得实际风矢大小r
ai
,进而求得际风矢,
[0062]
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1