一种罐车罐体容积测量装置的制作方法
1.本实用新型属于罐车检测设备技术领域,具体涉及一种罐车罐体容积测量装置。
背景技术:
2.近年来,我国危险货物道路运输行业规模持续扩大,常压液体危险货物罐车(以下简称罐车)保有量逐年增长,为支撑我国化工行业和经济社会持续健康发展作出了积极贡献。与此同时,大量不符合国家标准要求的罐车“带病运行”,给人民群众生命财产安全造成极大隐患。
3.工业和信息化部同公安部、交通运输部、市场监管总局开展《道路运输液体危险货物罐式车辆第1部分:金属常压罐体技术要求》(gb 18564.1—2019,以下简称gb 18564.1)宣贯实施和专题培训工作,依法按职责加强对罐车(包括车辆及罐体)生产、检验及使用等环节的指导,督促相关企业、检验机构及从业人员全面掌握标准内容和实施要求。
4.因此需要定期对罐车进行监督期检验,以确保安全性。在使用过程中,罐车的罐体会发生形变,导致容积发生变化,因此有一项检测要求为:罐体容积以出厂文件标注为准,公差大于3%则被认定罐体重大安全风险。那么在检测过程中如何精确测量的罐体的体积呢,罐体体积庞大,且为不规则形状,加之变形,很难测量其体积或容积。有人建议向罐体中注水,测量注入水的体积即可。但是罐体体积庞大,会浪费大量水资源;另外,罐车装载的大多是腐蚀性液体,如果用水测量容积后排出的水会造成环境污染。因此通过注水测量的方法不可行,所以需要设计一种精确测量罐体体积装置。
技术实现要素:
5.本实用新型的目的在于提供一种罐车罐体容积测量装置,解决现有技术中罐车的罐体体积不易精确测量的技术问题。
6.为了解决上述问题,本实用新型通过如下技术方案实现:
7.一种罐车罐体容积测量装置,包括移动支架,以及设置在移动支架上的控制器和3d扫描仪;
8.所述移动支架包括能够沿x轴方向移动的第一支架和能够沿y方向移动的第二支架;所述3d扫描仪设置在第一支架或者第二支架上,控制器和3d扫描仪之间通过导线电连接。
9.本技术通过设置移动支架和d扫描仪,将待检测罐车放置在支架下方,检测人员操作人机界面通过控制器控制第一支架沿x轴方向移动、第二支架沿y方向移动,带动3d扫描仪移动,从多个角度对罐体进行扫描,得出罐体的测量体积。采用该装置测量罐体体积,检测方便,快捷,且检测精度非常高。解决了现有技术中罐车的罐体体积不易精确测量的问题。
10.所述3d扫描仪的测量原理为现有技术,不再赘述。
11.进一步改进,所述第一支架包括横梁和两个支腿,横梁固定于两个支腿的上端,第
一支架整体呈门形框架;
12.底座上平行设置有两个第一滑轨,两个支腿的下端活动式卡设在对应的第一滑轨上,第一驱动机构驱动第一支架沿第一滑轨滑动;
13.所述横梁上沿其长度方向设置有第二滑轨,第二支架活动式卡设在第二滑轨上,第二驱动机构驱动第二支架沿第二滑轨滑动;
14.所述3d扫描仪设置于第二支架上。
15.进一步改进,所述第一驱动机构包括设置在底座上两个第一电机和两个第一丝杠;第一丝杠通过第一安装座与底座转动连接,且第一丝杠与第一滑轨平行设置,每个支腿下端固定设置有第一连接件,第一连接件上开设有螺纹通孔,每个第一连接件与对应的一个丝杠螺纹连接;每个第一电机的输出轴通过传动组件与对应的第一丝杠连接;
16.所述第二驱动机构包括设置在横梁上的第二电机和第二丝杠,第二丝杠通过第二安装座与横梁转动连接,且第二丝杠与第二滑轨平行设置;第二支架上固定设置有第二连接件,第二连接件上开设有螺纹通孔,第二连接件与第二丝杠螺纹连接;第二电机的输出轴通过传动组件与第二丝杠连接;
17.所述第一电机和第二电机均与控制器电连接。
18.通过控制器控制第一电机启动,驱动第一丝杠转动,带动第一支架沿一滑轨移动;通过控制器控制第二电机启动,驱动第二丝杠转动,带动第二支架和3d扫描仪沿二滑轨移动,实现3d扫描仪在支架上多方位移动,达到多角度扫描罐体的目的。
19.所述第一电机和第二电机均为伺服电机。伺服电机速度控制精确,转矩速度特性很硬,效率高,发热少,低噪音,方便通过控制电机的正反转来实现第一支架、第二支架的往复运动。
20.进一步改进,所述第一驱动机构包括两个第一电机、两个第一同步带轮和两个第一同步带,第一电机固定在底座上,第一电机输出轴上固定设置有第二同步带轮,第一同步带轮转动安装在底座上,第一同步带呈环状,每个第一同步带套设在对应的一个第二同步带轮和一个第一同步带轮上,第一同步带呈张紧状态,且第一同步带与对应的支腿下端固定连接;
21.所述所述第二驱动机构包括第二电机、第三同步带轮和第二同步带;第二电机固定在横梁上,第二电机输出轴上固定设置有第四同步带轮,第三同步带轮转动安装在横梁上,第二同步带呈环状,第二同步带套设在第三同步带轮和第四同步带轮上,第二同步带呈张紧状态,且第二同步带与第二支架的下端固定连接;
22.所述第一电机和第二电机均与控制器电连接。
23.通过控制器控制第一电机启动,驱动第一同步带转动,带动第一支架沿一滑轨移动;通过控制器控制第二电机启动,驱动第二同步带转动,带动第二支架和3d扫描仪沿二滑轨移动,实现3d扫描仪在支架上多方位移动,达到多角度扫描罐体的目的。同步带传动动力大,不易打滑。
24.进一步改进,还包括固定设置在底座上的两个第一支腿和两个第二支腿,两个第一支腿的上端设置有第一横梁,两个第二支腿的上端设置有第二横梁;第一横梁和第二横梁平行设置,且等高设置,第一横梁上沿其长度方向设置有第一滑轨,第二横梁上沿其长度方向设置有第二滑轨,第一支架的两端分别活动式卡设在第一滑轨和第二滑轨中,第一驱
动机构驱动第一支架沿第一滑轨和二滑轨滑动;
25.所述第一支架上沿其长度方向设置有第三滑轨,第二支架活动式卡设在第三滑轨上,第二驱动机构驱动第二支架沿第三滑轨滑动。
26.进一步改进,所述第一驱动机构包括设置在底座上两个第一电机和两个第一丝杠;一个第一丝杠通过第一安装座与第一横梁转动连接,另一个第一丝杠通过第一安装座分别与第二横梁转动连接,且第一丝杠均与第一滑轨和第二滑轨平行设置;第一支架的两端均固定设置有第一连接件,第一连接件上开设有螺纹通孔,每个第一连接件与对应的一个丝杠螺纹连接;每个第一电机的输出轴通过传动组件与对应的第一丝杠连接;
27.所述第二驱动机构包括设置在第一支架上的第二电机和第二丝杠,第二丝杠通过第二安装座与第一支架转动连接,且第二丝杠与第二滑轨平行设置;第二支架上固定设置有第二连接件,第二连接件上开设有螺纹通孔,第二连接件与第二丝杠螺纹连接;第二电机的输出轴通过传动组件与第二丝杠连接;
28.所述第一电机和第二电机均与控制器电连接。
29.进一步改进,所述第一驱动机构包括两个第一电机、两个第一同步带轮和两个第一同步带;
30.其中,一个第一电机固定在第一横梁上,另一个第一电机固定在第二横梁上,第一电机输出轴上固定设置有第二同步带轮;一个第一同步带轮转动安装在在第一横梁上,另一个第一同步带轮转动安装在在第二横梁上;第一同步带呈环状,每个第一同步带套设在对应的一个第二同步带轮和一个第一同步带轮上,第一同步带呈张紧状态,且每个第一同步带与第一支架的对应端固定连接;
31.所述所述第二驱动机构包括第二电机、第三同步带轮和第二同步带;第二电机固定在第一支架上,第二电机输出轴上固定设置有第四同步带轮,第三同步带轮转动安装在第一支架上,第二同步带呈环状,第二同步带套设在第三同步带轮和第四同步带轮上,第二同步带呈张紧状态,且第二同步带与第二支架的下端固定连接;
32.所述第一电机和第二电机均与控制器电连接。
33.基于上述罐车罐体容积测量装的罐体检测方法,包括如下步骤:
34.s1:建立数据库,该数据库包括市场上各种罐车的型号,以及每种型号的罐车的罐体出厂初始体积;
35.s2:通过与控制器连接的人机操作界面输入待检测罐车的型号,得出该罐车的罐体出厂时的初始体积v0;
36.s3:将待检测罐车移动至测量装置的底座上,然后检测人员操作人机界面通过控制器控制第一支架沿x轴方向移动、第二支架沿y方向移动,带动3d扫描移动,从多个角度对罐体进行扫描,得出罐体的测量体积v1;
37.s3:控制器对测量体积v1和初始体积v0进行比较,当|v1-v0|/v0小于等于3%,则检测合格,该罐车的罐体变形较小;
38.当|v1-v0|/v0大于3%,则检测不合格,该罐车的罐体变形严重;同时与控制器连接的报警系统发出声光报警提醒。
39.与现有技术相比,本实用新型的有益效果是:
40.本技术通过设置移动支架和d扫描仪,将待检测罐车放置在支架下方,检测人员操
作人机界面通过控制器控制第一支架沿x轴方向移动、第二支架沿y方向移动,带动3d扫描移动,从多个角度对罐体进行扫描,得出罐体的测量体积。采用该装置测量罐体体积,检测方便,快捷,且检测精度非常高。解决了现有技术中罐车的罐体体积不易精确测量的问题。
附图说明
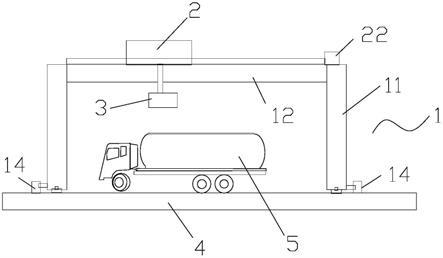
41.图1为实施例一中罐车罐体容积测量装置的结构示意图;
42.图2为图1的俯视图;
43.图3为本实用新型所述罐车罐体容积测量装置的电器组件框图;
44.图4为采用本实用新型所述罐车罐体容积测量装置检测测量罐体体积的方法流程图;
45.图5为实施例三中罐车罐体容积测量装置的结构示意图;
46.图6为图5的俯视图。
具体实施方式
47.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述。
48.实施例一:
49.如图1-3所示,一种罐车罐体容积测量装置,包括移动支架,以及设置在移动支架上的控制器和3d扫描仪3;
50.所述移动支架包括能够沿x轴方向移动的第一支架1和能够沿y方向移动的第二支架2;所述3d扫描仪3设置在第二支架2上,控制器和3d扫描仪之间通过导线电连接。
51.在本实施例中,3d扫描仪为三维激光扫描仪。
52.在本实施例中,所述第一支架1包括横梁12和两个支腿11,横梁12固定于两个支腿11的上端,第一支架1整体呈门形框架;底座4上平行设置有两个第一滑轨13,两个支腿11的下端活动式卡设在对应的第一滑轨上,第一驱动机构驱动第一支架沿第一滑轨滑动,第一滑轨的两端设置有第一限位块;所述横梁12上沿其长度方向设置有第二滑轨21,第二支架2活动式卡设在第二滑轨21上,第二驱动机构驱动第二支架沿第二滑轨滑动,第二滑轨21的两端设置有第二限位块。
53.在本实施例中,所述第一驱动机构包括设置在底座4上两个第一电机14和两个第一丝杠15;第一丝杠15通过第一安装座与底座4转动连接,且第一丝杠15与第一滑轨13平行设置,每个支腿下端固定设置有第一连接件,第一连接件上开设有螺纹通孔,每个第一连接件与对应的一个丝杠15螺纹连接;每个第一电机14的输出轴通过传动组件与对应的第一丝杠15连接。
54.所述第二驱动机构包括设置在横梁12上的第二电机22和第二丝杠23,第二丝杠通过第二安装座与横梁12转动连接,且第二丝杠23与第二滑轨21平行设置;第二支架2上固定设置有第二连接件,第二连接件上开设有螺纹通孔,第二连接件与第二丝杠螺纹连接;第二电机的输出轴通过传动组件与第二丝杠连接。
55.如图3所示,所述第一电机14和第二电机22均与控制器电连接。通过控制器控制第一电机启动,驱动第一丝杠转动,带动第一支架沿一滑轨移动;通过控制器控制第二电机启
动,驱动第二丝杠转动,带动第二支架和3d扫描仪沿沿二滑轨移动,实现3d扫描仪在支架上多方位移动,达到多角度扫描罐体的目的。
56.所述第一电机和第二电机均为伺服电机。伺服电机速度控制精确,转矩速度特性很硬,效率高,发热少,低噪音,方便通过控制电机的正反转来实现第一支架、第二支架的往复运动。
57.如图4所示,基于上述罐车罐体容积测量装的罐体检测方法,包括如下步骤:
58.s1:建立数据库,该数据库包括市场上各种罐车的型号,以及每种型号的罐车的罐体出厂初始体积;
59.s2:通过与控制器连接的人机操作界面输入待检测罐车的型号,得出该罐车的罐体出厂时的初始体积v0;
60.s3:将待检测罐车移动至测量装置的底座上,然后检测人员操作人机界面通过控制器控制第一支架沿x轴方向移动、第二支架沿y方向移动,带动3d扫描移动,从多个角度对罐体进行扫描,得出罐体的测量体积v1;
61.s3:控制器对测量体积v1和初始体积v0进行比较,当|v1-v0|/v0小于等于3%,则检测合格,该罐车的罐体变形较小;
62.当|v1-v0|/v0大于3%,则检测不合格,该罐车的罐体变形严重;同时与控制器连接的报警系统发出声光报警提醒。
63.本技术通过设置移动支架和d扫描仪,将待检测罐车放置在支架下方,检测人员操作人机界面通过控制器控制第一支架沿x轴方向移动、第二支架沿y方向移动,带动3d扫描移动,从多个角度对罐体进行扫描,得出罐体的测量体积。采用该装置测量罐体体积,检测方便,快捷,且检测精度非常高。解决了现有技术中罐车的罐体体积不易精确测量的问题。
64.实施列二:
65.在本实施例中,所述第一驱动机构包括两个第一电机、两个第一同步带轮和两个第一同步带,第一电机固定在底座上,第一电机输出轴上固定设置有第二同步带轮,第一同步带轮转动安装在底座上,第一同步带呈环状,每个第一同步带套设在对应的一个第二同步带轮和一个第一同步带轮上,第一同步带呈张紧状态,且第一同步带与对应的支腿下端固定连接;
66.所述所述第二驱动机构包括第二电机、第三同步带轮和第二同步带;第二电机固定在横梁上,第二电机输出轴上固定设置有第四同步带轮,第三同步带轮转动安装在横梁上,第二同步带呈环状,第二同步带套设在第三同步带轮和第四同步带轮上,第二同步带呈张紧状态,且第二同步带与第二支架的下端固定连接;
67.所述第一电机和第二电机均与控制器电连接。通过控制器控制第一电机启动,驱动第一同步带转动,带动第一支架沿一滑轨移动;通过控制器控制第二电机启动,驱动第二同步带转动,带动第二支架和3d扫描仪沿沿二滑轨移动,实现3d扫描仪在支架上多方位移动,达到多角度扫描罐体的目的。同步带传动动力大,不易打滑。
68.其他部分与实施例一中相同。
69.实施列三:
70.如图5、6所示,在本实施例中,还包括固定设置在底座上的两个第一支腿7和两个第二支腿8,两个第一支腿7的上端设置有第一横梁71,两个第二支腿8的上端设置有第二横
梁81;第一横梁71和第二横梁81平行设置,且等高设置,第一横梁81上沿其长度方向设置有第一滑轨13,第二横梁上沿其长度方向设置有第二滑轨21,第一支架的两端分别活动式卡设在第一滑轨13和第二滑轨21中,第一驱动机构驱动第一支架1沿第一滑轨和二滑轨滑动。
71.所述第一支架1上沿其长度方向设置有第三滑轨25,第二支架2活动式卡设在第三滑轨上,第二驱动机构驱动第二支架沿第三滑轨滑动。
72.在本实施例中,所述第一驱动机构包括两个第一电机14、两个第一同步带轮19和两个第一同步带18。
73.其中,一个第一电机14固定在第一横梁71上,另一个第一电机固定在第二横梁81上,第一电机输出轴上固定设置有第二同步带轮;一个第一同步带轮转动安装在在第一横梁上,另一个第一同步带轮转动安装在在第二横梁上;第一同步18带呈环状,每个第一同步带套设在对应的一个第二同步带轮和一个第一同步带轮上,第一同步带呈张紧状态,且每个第一同步带与第一支架的对应端固定连接。
74.所述所述第二驱动机构包括第二电机21、第三同步带轮25和第二同步带26;第二电机21固定在第一支架2上,第二电机输出轴上固定设置有第四同步带轮,第三同步带轮25转动安装在第一支架1上,第二同步带26呈环状,第二同步带套设在第三同步带轮和第四同步带轮上,第二同步带呈张紧状态,且第二同步带与第二支架的下端固定连接;所述第一电机和第二电机均与控制器电连接。
75.其他部分与实施例一中相同。
76.实施例四:
77.在本实施例中,所述第一驱动机构包括设置在底座上两个第一电机和两个第一丝杠;一个第一丝杠通过第一安装座与第一横梁转动连接,另一个第一丝杠通过第一安装座分别与第二横梁转动连接,且第一丝杠均与第一滑轨和第二滑轨平行设置;第一支架的两端均固定设置有第一连接件,第一连接件上开设有螺纹通孔,每个第一连接件与对应的一个丝杠螺纹连接;每个第一电机的输出轴通过传动组件与对应的第一丝杠连接;
78.所述第二驱动机构包括设置在第一支架上的第二电机和第二丝杠,第二丝杠通过第二安装座与第一支架转动连接,且第二丝杠与第二滑轨平行设置;第二支架上固定设置有第二连接件,第二连接件上开设有螺纹通孔,第二连接件与第二丝杠螺纹连接;第二电机的输出轴通过传动组件与第二丝杠连接;
79.所述第一电机和第二电机均与控制器电连接。
80.其他部分与实施例三中相同。
81.应当理解,此处所描述的具体实施例仅用以解释本实用新型,并不用于限定本实用新型;凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1