容积填充气流测量的制作方法
容积填充气流测量
1.相关申请的交叉引用
2.本技术要求于2020年4月6日提交的第16/840,904号美国非临时申请(标题为“容积填充气流测量”)的优先权。上述申请的全部内容通过引用结合于此,以用于各种用途。
技术领域
3.本发明的技术领域涉及气流的测量,更具体地,涉及在出口端处对机械通风系统的容积填充气流测量。
背景技术:
4.可以使用不同的方法和装置来测量气流,例如,来自出风口的气流。一种方法包括测量填充已知容积所需的时间,然后将容积除以填充该容积所花费的时间量来获得气流速率。该测量可包括将一个袋放在调节器(register)(出风口)上,然后使用秒表测量来自通风口的气流填充该袋所花费的时间量;最后,计算气流的速率为该袋的容积除以填充该袋的时间。
5.使用容积(或袋)填充气流测量技术的商业装置目前不可用。现有装置是自制的独特装置,其提供有限的准确性和重复性。一种典型设置包括绑在木架上的空塑料袋、纸板和秒表。用户将袋和框架放在水平表面上(例如,桌子或地板上)的纸板上。用纸板盖住气流开口,使其穿过框架并进入袋内,然后将组件移近或几乎移到调节器(通风口)上方,并放置纸板,以防止袋内充满空气。然后,用户准备秒表,一旦纸板被迅速拉开并且框架被放下或放置到通风口周围的表面以允许通风口的气流开始填充袋,开始计时。一旦袋填满,秒表停止,框架和袋可以从覆盖通风口的地方移除。最后,用户通过袋的容积除以从通风口流出的气流填充该袋所花费的时间来计算气流速率。通过适当的尺寸分析,气流测量可表示为,例如,立方英尺/分钟(cfm)或升/秒(l/s)。
6.现有的容积填充气流测量技术可提供出风口气流的简单估计。然而,许多方面可能会降低一次测量到下一次测量的测量结果的准确性和可重复性。对于特定设置和用户,例如,框架周围的气流泄漏量的变化,如何移除纸板以及何时启动秒表的不一致性、展开时袋材料阻力的变化、以及用户观察和确定袋完全装满的时刻(以及秒表停止的时刻)的差异可能会导致特定出风口的气流测量的差异和变化。当不同的用户/技术人员使用相同的设置时和/或当使用不同的设置时,例如,使用不同类型和/或尺寸的袋的设置时,会进一步增加不一致、精度降低和测量之间的变化的可能性。
技术实现要素:
7.需要的是容积填充气流测量的设计,以解决现有设计的一个或多个缺点。
8.在结合附图考虑本发明的以下详细描述时,将更容易理解本发明的上述和其他目的、特征和优点。
附图说明
9.为了更全面地理解本发明,本文中的附图示出了本发明的示例。然而,附图不限制本发明的范围。附图中相似的附图标记表示相似的元件。
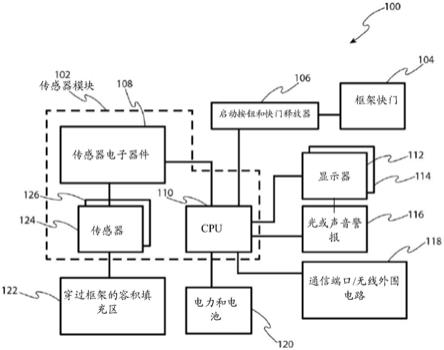
10.图1是根据各种优选实施例的容积填充气流测量装置的功能框图。
11.图2是根据各种优选实施例的图1中的容积填充气流测量装置的示例性传感器模块的功能框图。
12.图3是根据各种优选实施例的容积填充气流测量方法的示例性流程图。
13.图4示出将根据各种实施例的示例性容积填充气流测量装置放置在要测量的出风口上。
14.图5示出打开图4中用于出风口气流测量的容积填充气流测量装置的快门。
15.图6示出图4中的容积填充气流测量装置的部分填充容积。
16.图7示出图4中的容积填充气流测量装置的填充容积。
17.图8示出图4所示的容积填充气流测量装置的示例性局部内透视图。
18.图9示出图8所示的容积填充气流测量装置的示例性局部透视图。
具体实施方式
19.在下面的详细描述中,阐述了许多具体细节,以便对优选实施例提供彻底的理解。然而,本领域技术人员将理解,可以在不包括这些具体细节的情况下实施本发明,本发明不限于所描述的实施例,并且本发明可以在各种备选实施例中实施。在其他情况下,众所周知的方法、过程、组件和系统未予详细描述。
20.容积填充气流测量装置的优选实施例包括:框架,具有与其可密封连接的容积捕获元件(或袋);框架快门,可打开框架和可关闭框架;以及传感器模块,适于感测容积捕获元件的充满状态。该装置优选地包括:启动按钮或快门释放器,用于打开快门和启动计时器(尽管该装置可包括用于打开和启动计时器的自动装置);以及显示器(或多个显示器),用于视觉呈现启动按钮或快门释放器的凹下与检测到容积捕获元件的充满状态之间所经过的时间和/或用于视觉呈现计算出的气流速率,计算出的气流速率是基于容积捕获元件的容积和经过的时间(或填充袋所需的时间)。计算出的气流速率可包括处理器的计算,并且传感器模块可包括处理器、适于检测容积捕获元件的充满状态的一个或多个传感器以及与一个或多个传感器相关联的电路和/或电子装置。优选实施例还可包括用于向装置供电(例如,来自电池)的相关电路、一个或多个声音(听觉)和/或光(视觉)警报组件和/或一个或多个通信端口,其可包括用于与例如外部笔记本电脑或移动装置(例如,智能手机)进行无线(非接触)通信的电路。
21.容积填充气流测量方法的优选实施例包括:在准备装置后,将带有容积捕获元件的框架放置在待测量的hvac通风口上,打开框架快门(并启动计时器),以允许来自通风口的气流填充容积捕获元件(袋),使用传感器模块检测容积捕获元件的充满状态(并停止计时器),通过将填充容积除以计时器所经过的时间来计算测量的气流(并可选地应用在容积填充气流测量装置的校准中建立的一个或多个校正系数,和/或基于装置的背压和/或袋的展开(打开和填充)阻力的一个或多个校正系数(例如,由于袋的材料厚度和/或装置的另一特性或装置的应用)。校正系数可考虑例如质量(密度)和弹性(袋的弹性)和/或其他决定变
量。该方法优选地包括显示至少计算出的气流速率,并且该方法还优选地包括保存/记录测量数据(经由与装置的处理器相关联的存储器,或经由与诸如笔记本电脑或移动装置等外围存储装置的通信)。
22.概括地,图1为示例性容积填充测量装置的功能框图,图2为示例性传感器模块的功能框图,该示例性传感器模块包括用于在容积捕获元件充满(处于充满状态)时进行感测的lidar(光检测和测距)型传感器。图3为示出根据优选实施例的用于在出口端处测量机械通风系统的容积填充气流的示例性方法步骤的流程图。图4、图5、图6和图7示出用于测量来自垂直(壁装)出风口的气流的装置的示例性使用。图8和图9为从装置的另一侧(相反侧)示出图4至图7所示的视图的附加细节的局部透视图,以提供包括示例性传感器模块元件和其他视图中未清楚示出或描述的示例性特征的附加细节。图4至图7以及图8和图9中所示的视图与所示的示例性实施例成比例(按比例)。
23.图1为根据各种优选实施例的容积填充气流测量装置100的功能框图。容积填充气流测量装置100的优选实施例包括:框架,具有与其密封连接的容积捕获元件(或袋)(例如,统称为框架和容积捕获元件122);框架快门104,可打开和关闭框架;以及传感器模块102,适于感测容积捕获元件的充满状态。框架优选地包括尺寸和定向的结构,使得框架的外围可以紧靠出口端(或通风口,或加热、通风和空调(hvac)格栅)周围的表面,使得从出口端排出的气流流过框架开口,填充密封地附在框架上的容积捕获元件(或袋)。框架可以包括各种各样的结构中的任一种,并且可以被配置成各种各样的形状中的任一种。在优选实施例中,框架包括容积捕获元件(例如,可充气袋)可从其展开的结构。在一些实施例中,框架包括主要结构,用于收纳、容纳或支撑构成容积填充气流测量装置(例如,装置100)的所有组件。在一个实施例中,框架可包括矩形形状,所述矩形形状在一侧上具有接合面,所述接合面接触通风口周围的表面,或者接触通风口安装或连接到的表面(通常是共面表面,例如墙壁、地板或天花板)。容积捕获元件优选地密封地附接到框架,使得其(袋)在与框架的通风口相反的方向上打开或展开。
24.袋(或容积捕获元件)优选地包括一种材料,其尺寸和配置使得能够从方向(在其塌缩状态下不含空气或含有最小量的空气)打开到充满状态,充满状态位于框架接合面和气流来源的出风口的相对侧。优选地,袋灵活地展开进入其充满状态,使得袋在充满状态时在其内部具有预定形状,并且袋容易塌缩以用于随后的容积填充气流测量。在一些实施例中,袋包括柔性塑料袋或柔性尼龙袋,并且袋固定在框架上以便从框架偏转和展开以捕获一定量的气流。在一些实施例中,袋包括材料质量(密度)、厚度、柔韧性、侧壁尺寸、底部尺寸、塌缩/展开/再塌缩/再折叠的容易度(无阻力)以及其他特性,这些特性被选择为允许在3到20秒内充气到填充容积的状态,并使得来自同一目标出风口的连续气流测量之间的变化最小化。在一些实施例中,袋包括任何或所有上述特征,所述特征被选择为允许比上述3到20秒更快或更慢地充气到填充容积的状态。本发明人发现,例如,本文所描述的实施例可以允许容积填充时间比现有或先前的袋/容积填充测量技术更快(更短),具有改进的(更低的)测量间变化。本发明人进一步认识到,例如,由于需要手动启动和停止秒表,先前的方法可能具有超过三秒的优选容积填充持续时间。
25.容积捕获元件和框架122优选地耦接到传感器模块102或装配有传感器模块102,传感器模块102检测袋何时处于充满状态。传感器模块102优选地包括一个或多个传感器
124、126、处理器或cpu 110以及传感器电子器件108。可以使用不同类型的传感器。例如,如将关于图2进一步详细讨论的,传感器模块102可以包括具有相关联的支持电路的激光雷达(lidar)或飞行时间(tof)激光测距型传感器以及相关的支持电路,lidar或测距/范围检测型传感器适用于检测袋内的表面或至少到内部袋表面的范围(例如,袋子在其充满状态下的远侧或背侧的位置,或被称为袋的“底部”的内侧)。在其它实施例中,传感器124、126可包括一个或多个压力传感器或压差传感器,其适于感测压力变化并检测指示或检测袋的充满状态的压力。可以使用其他类型的传感器。可使用其它类型的测距传感器类型,例如,超声波或红外。
26.框架快门104优选地包括如下的结构和材料,该结构和材料被配置和定向为防止袋改变其塌缩或清空状态或防止袋被来自正被测试/测量的出风口的气流填充,直到该快门被打开。快门104优选地具有关闭位置(使袋保持或保留在塌缩或尚未被填充的状态)和打开位置(允许袋展开并填充通过框架外围进入袋内部容积的气流)。在一些实施例中,快门104包括片状材料,当处于关闭位置时,所述片状材料覆盖所述框架或者至少覆盖所述框架中的使袋展开进入充满状态的开口;当处于打开位置时,该片状材料从覆盖框架或至少覆盖框架中的使袋展开进入充满状态的开口之处缩回。在一些实施例中,快门包括可从卷起方向向外拉或展开的材料,例如在筒体或圆筒中,并且当快门104打开/释放时,材料缩回筒体中,优选地,当快门104处于关闭状态时,利用弹簧力使快门材料保持其在筒内的卷起状态,并且当材料覆盖框架时将快门拉向其卷起状态。
27.该装置优选地包括用于打开快门104并启动计时器的启动按钮或快门释放器106以及显示器112(或多个显示器112、114),所述显示器用于可视地呈现从按下启动按钮或快门释放器106到检测到容积捕获元件的充满状态之间所经过的时间,和/或可视地呈现计算出的气流速率,所述计算出的气流速率是基于容积捕获元件的容积和经过的时间(或填充袋所需的时间)。启动按钮或快门释放器106优选地包括诸如导致释放锁扣的锁扣或按钮的结构以及用于启动计时器的电路,例如cpu 110中的计时器。优选地,当快门被释放时,当容积捕获元件(袋子)开始填充空气时,计时器被启动。在一些实施例中,该装置不包括启动按钮或快门释放器106,而是使用自动装置来打开和启动计时器。例如,该装置可包括适于基于容积捕获元件的充气自动启动和/或自动停止的电路。例如,传感器模块102可感测容积捕获元件的充气和/或容积捕获元件的充气速率;在一些实施例中,传感器模块102可以基于感测到的充气而自动启动计时器。
28.当传感器模块102检测到袋子充满时,计时器停止,例如由cpu 110计算气流速率,并且例如在显示器112或显示器112、114上显示计算出的气流和/或经过的时间(从快门释放到袋子充满之间)。显示器112、114可以是适于显示例如计算出的气流值的任何显示器。显示器112、114可以是例如lcd、led或oled型显示器。
29.优选实施例可进一步包括用于向装置提供电源120(例如,来自电池)的相关电路、一个或多个声音(听觉)和/或光(视觉)警报组件116和/或一个或多个通信端口118,其可包括用于与例如外部笔记本电脑或移动装置如智能手机进行无线通信的电路。电源和电池120可以包括例如一对aa电池,用于向传感器模块102和/或装置100的其他组件供电。一个或多个声音或光警报116可以包括,例如,装置100通电、快门释放关闭和传感器模块准备开始容积填充气流测量的声音和/或视觉指示;和/或装置100在快门释放和气流填充袋之后
成功地感测到袋达到其充满状态并成功地计算出气流速率的声音和/或视觉指示。可包括其它听觉和/或视觉指示,例如,装置100的组件中的故障的听觉或视觉警报。
30.图2是根据各种优选实施例的图1中容积填充气流测量装置100的示例性传感器模块102以及框架202和目标222的功能框图200。在一些实施例中,传感器模块102可包括具有光学测距传感器的lidar传感器或飞行时间(tof)激光测距模块。如图2所示,传感器模块102可以包括例如lidar传感器。示例性lidar传感器通常可包括用于控制激光驱动器206的控制和处理电路204。在驱动一个或多个激光二极管214之前,来自激光驱动器电路206的控制信号可被放大210(经由放大电路)。激光二极管光学器件218可用于聚焦或引导光束或光脉冲穿过框架朝向目标222,其优选地包括容积捕获元件或袋的内部远侧或后壁。来自光束或光脉冲的光反射回来被光学器件220接收。反射的光被光学器件220聚焦或引导到检测器二极管216(或光电检测器)。来自检测器二极管216的信号随后被放大212(经由放大电路)并被发送到检测器测量电路208,随后来自检测器测量电路208的输出信号被控制和处理电路204接收。
31.除图2中所示的电路和/或配置外,其他电路和/或配置可用于特定lidar感测实施方式。例如,激光二极管光学器件218可包括对目标222的旋转或相控阵列型激光扫描,以代替接收范围(距离)信息(即,目标222距框架202有多远),传感器模块102提供包括目标222的扫描表面的检测。扫描容积捕获元件(袋)的远侧或后壁可用于检测袋的充满状态。
32.在一些实施例中,lidar传感器可配置为测量到容积捕获元件或袋的表面的距离。一旦测量的距离处于预定范围内,其中,预定范围指示容积捕获元件或袋子的填充容积状态,则传感器模块102提供袋子充满的检测,并且计时器因此停止。在一些实施例中,除了使用预定范围之外,传感器模块102还可以提供变化率,该变化率随后可以用于确定袋子何时充满的算法中。本发明人确定的变化率可用于确定袋子何时卡住或接近充气。在其它实施例中,并且以类似方式,lidar传感器可被配置成测量(或扫描)袋的多个表面位置。一旦测量的距离处于预定范围内(距离范围),传感器模块102提供袋子充满的检测,并且计时因此停止。
33.图3是根据各种优选实施例的用于容积填充气流测量的方法300的示例性流程图。用于容积填充气流测量的方法(例如,方法300)的优选实施例可包括,在步骤302中准备好装置(其可包括在步骤304中使容积捕获元件塌缩,在步骤306中关闭快门,以及在步骤308中为装置的cpu和其他电子器件供电)之后:在步骤310中将具有容积捕获元件的框架放置在要测量的hvac通风口上;在步骤312中打开框架快门(并启动计时器),以允许来自通风口的气流填充容积捕获元件(袋);在步骤314中用传感器模块检测容积捕获元件的充满状态(并且在步骤316中,停止计时器以测量填充容积所花费的时间);以及在步骤318中,通过将填充容积除以计时器经过的时间来计算所测量的气流(并且可选地应用在容积填充气流测量装置的校准中建立的一个或多个校正系数,和/或基于装置的背压和/或袋的展开(打开和填充)阻力(例如,由于袋的材料厚度)和/或装置的另一特性或装置的应用)的一个或多个校正系数。该方法优选地包括在步骤320中显示至少计算出的气流速率,并且该方法还优选地包括保存/记录测量数据(经由与装置的处理器相关联的存储器,或者经由与诸如笔记本电脑或移动装置的外围存储装置的通信)。例如,计算出的气流速率数据可以在步骤322中保存/存储在与装置相关联的存储器中,和/或在步骤324中保存/存储在笔记本电脑或移
动装置上,和/或在步骤326中保存/存储在单独的存储器装置或系统上。
34.附图标记322、324和326用于表示通过不同方式(例如,车载装置存储器、外围装置等)保存和存储与空气流量测量相关的数据,以及表示连续或单独测量中记录的数据。例如,在步骤的第一测量序列中,计算出的气流/气流速率(和/或与这种计算出的气流相关联的其他数据,例如用于特定测量的日期和时间戳信息和/或位置信息)可以存储在记录数据322中。如果在决定步骤328中要进行另一(第二)测量,则在步骤302中准备容积填充气流测量装置,例如装置100,并且方法如上所述进行,所得的计算气流和/或其他相关数据(例如,特定气流测量的唯一日期、时间和位置)被存储在记录数据324中。同样地,另一后续(或第三)测量可包括存储第三计算气流,该第三计算气流可存储在记录数据326中。并且,在优选实施例中,可进行后续测量,例如,遵循方法300中的方法步骤,将测量数据存储在附加记录中,记录的数量仅受可用存储量的限制(此后,可将附加测量值存储并记录在补充或附加存储器中,或通过附加外围存储)。在一些实施例中,来自连续测量的数据可以例如通过通信端口/无线外围装置118无线地传送到在线或基于云的存储器,从而提供用于存储来自多个测量的数据的几乎无限的容量。
35.如果在决定步骤328中不进行附加测量,则该方法在步骤330中结束。在一些优选实施例中,步骤330包括准备方法步骤302的一部分,例如使容积捕获元件塌缩(在步骤304中)和关闭快门(在步骤306中),使得装置可以断电,并存放在更紧凑和随时可用的条件下以备后续使用。
36.现在转到图4至图7,提供一系列图示,以示出根据实施例的示例性容积填充测量装置和将该装置用于测量来自垂直(壁装)出风口的气流的使用。使用不同配置和方向/应用中的各种实施例进行测试。例如,图4至图7示出如何将该装置用于测量垂直安装的出风口或通风口的气流。所述测试是使用基本上如图示所示的装置进行的,图4示出固定在垂直安装/壁装hvac通风口附近的框架或装置。图5示出框架紧靠墙表面并打开快门(和启动计时器)以允许容积捕获元件开始填充从墙通风口排出的空气。图6所示的装置比图5所示的装置晚了较短时间,容积捕获元件(或袋)部分填充从壁通风口排出的空气。图7示出大约比图6中的装置晚了较短时间的装置,容积捕获元件完全填充。在次示例性测试中,容积捕获元件填充约1秒,容积捕获元件包括定向以捕获约2立方英尺容积的空气的袋。2立方英尺除以1秒,再乘以每分钟60秒,可提供约每分钟120立方英尺(或120cfm)的气流。在另一示例性测试中,使用容积填充测量装置(例如,装置100)来测量来自水平安装/落地安装的hvac通风口的气流,在大约两秒内填充容积捕获元件(捕获大约两立方英尺的容积)。2立方英尺除以2秒,再乘以每分钟60秒,等于每分钟60立方英尺(或60cfm)的气流速率。这些示例性计算是基于与用于创建图4至图7中图示的测试的视频捕获相关联的粗略视觉(手动)观察,并在这里描述为基于视觉检查所执行测试的视频记录的气流速率的示例计算。容积填充测量装置(例如装置100)使用自动化和电子方法(例如,使用包括传感器模块102的组件)提供容积填充气流测量,以更准确地(更可靠地/在不同测量之间更可重复地)确定容积捕获元件完全填充所花费的时间并计算所测量的气流速率。
37.图4示出400根据各种实施例将示例性容积填充气流测量装置放置在出风口402上方以测量其气流速率。所示通风口402包括安装在垂直壁404中的风道(未示出)上的标准hvac排气/排放通风口出口。容积填充测量装置优选地包括用于与围绕通风口402的壁404
的表面接合的前面(或接合面)410。优选地根据周长尺寸设计前面410(或接合面410)的尺寸和形状,使框架前面410能够与壁404的表面接合(优选地,密封接合)以完全围绕通风口402,从而将从通风口402排出的空气引导到容量捕获元件,该容量捕获元件容纳在包含快门428的框架结构和材料(在图4中,隐藏在后面)中并被该框架结构和材料围绕。在图示400中,快门428被示出在完全关闭的位置,快门的前缘436延伸穿过框架的背面414,基本上覆盖框架的内开口,一旦快门材料428缩回(例如,缩入)与快门前缘426相对的快门盒424,容积捕获元件可通过该内开口扩展以填充从被测试/测量的通风口排出的空气。
38.在一些实施例中,如图4所示,测量装置可包括电池420(例如,电源)和电池120(包括两个aa电池),用于向包括显示器(例如,显示器112、114)的电子装置422、传感器模块102的部分(例如,cpu 110)以及测量装置(例如,装置100)的其他电子部件供电。尽管电池420和电子器件422被示出为沿着角部430和416之间延伸的长度安装在框架结构的一侧,但电子器件422和电池420可以设置在其他位置,例如,在顶面418中或顶面418上。在一些实施例中,包括测量装置的电子部件(如参考装置100所述)可整体形成在框架结构内、全部或部分安装在框架结构的内表面上、或设置在与图中所示不同的位置。
39.虽然框架结构可以包括能够围绕排放口(要测量其排放流量)的安装表面的任何形状,所示的测量装置包括框架结构,该框架结构具有前面410,前面410包括矩形或方形的周长,周长的大小为围绕普通标准尺寸的通风口402。通风口402可以是任何尺寸,并且可以包括例如标准尺寸的通风口,例如4"x10"、4"x12"、6"x10"或6"x12"的调节器/格栅。如图所示,框架具有在角部416和430之间延伸的长度(或x轴)尺寸、在角部412和432之间延伸的宽度(或y轴)尺寸以及在角部416和412之间延伸的深度或厚度(或z轴)尺寸。示例性外部尺寸可包括角部416和430之间为17英寸,角部412和432角之间为17英寸;以及示例性内部尺寸(所示为快门428所覆盖,当快门428打开且容积捕获元件充满空气时,容积捕获元件(或袋)通过其从前面410向外扩展)可包括16英寸(长度/x方向)乘以16英寸(宽度/y方向)。示例性深度或厚度(z方向)尺寸(角部416和412之间)可包括3.5到4英寸。
40.如图4所示,框架优选手持式尺寸且足够轻,以便使用两只手轻松地握住,例如,用户的手408从框架一侧的用户臂406伸出,另一只手(未示出)在框架另一侧。例如,把手(由用户的手408隐藏)可以附在框架结构的相对侧上。
41.图4所示的装置的示例性操作包括为电子装置422通电,通过电子装置422内的oled显示器验证该装置准备好开始气流测量序列(该序列优选地包括电子装置422识别出快门前缘426处于适当(关闭)的启动位置,纳入处于未填充(容积塌缩)状态的容积捕获元件,以及启用快门释放器和/或用于当快门被释放时启动计时器的计时器启动开关/按钮),然后将框架移动到适当位置以覆盖要测量的气流源,例如通风口402。
42.在一些实施例中,可在例如电子装置422中提供听觉(声音)和/或视觉(光)警报,以向用户提供该装置准备好启动气流测量的指示和/或系统/装置故障的指示和/或其他指示。例如,如果快门材料没有完全延伸到其启动位置,则可能会发出警报,以防止来自被测排放的气流开始填充容积捕获元件的容积。作为进一步的示例,可使用听觉和/或视觉警报来指示电池电量低或其他装置状况,或指示例如通信端口或无线外围装置的连接状态。可提供其它听觉和/或视觉指示以指示例如表面410与待测量的目标出风口周围的表面充分接合、容积捕获元件处于容积塌缩状态的充分性、容积填充(或正在填充的容积)状态,容积
充满状态检测(或充满容积捕获元件的检测)、气流速率测量的成功完成、气流测量数据的成功记录/存储/通信、存储器满指示、袋子撕裂、传感器故障等。
43.接下来,图5示出500打开容积填充气流测量装置的快门以测量图4中的出风口的气流。如图所示,框架接合面410与被测量的出风口周围的表面404保持接触(优选地,可密封)。优选地,打开快门包括按下启动按钮或快门释放按钮或解锁快门夹持器、或允许快门材料缩回(例如,缩入快门盒424)的其它机构。一旦快门被释放或与该释放同时,启动计时器,并允许容积捕获元件被填充来自被测出风口的气体排放(或气流)。如图所示,一旦快门被释放,快门的前缘426缩回(例如,缩入盒424)以暴露容积捕获元件502,容积捕获元件502随后能够在填充有来自出风口402的气流时扩展。在一些实施例中,盒424包括弹簧加载圆筒,其被配置成将(可卷片状)快门材料从基本上覆盖框架的后部(在z轴方向上朝向用户,如图5所示)开口以容纳并保持容积捕获元件处于未填充状态的闭合位置缩回(和容纳)至暴露框架的后部开口以使得容积捕获元件填充有来自被测风口的气体排放的打开位置。
44.图6示出图4中容积填充气流测量装置的部分填充容积。如图所示,容积捕获元件502随着其容积填充有来自被测量出风口的气体排放而扩展,或者更具体地,气体排放经过由框架接合面410限定的框架开口并进入容积捕获元件502的容积内。在一个实施例中,容积捕获元件(或袋)包括从框架接合面向后延伸(沿z轴方向)的四个侧面和与框架开口/框架接合面相对的底部,其中,四个侧面和底部以及框架开口/框架接合面的表面积在处于充气状态时围出容积,并且构成侧面和底部的材料可以折叠、卷绕、或以其他方式放气或压缩成围出基本上为零容积的塌缩状态。在一个实施例中,容积捕获元件(或袋)502包括柔性材料,如图6所示,具有最后表面(或底部)608、侧面612和610、侧面612和610之间的边缘(或接缝)604、侧面610和相对侧面612之间的边缘(或接缝)602以及位于边缘602的最后(或底)端的角部606。
45.在优选实施例中,当构成容积捕获元件502的材料扩展以容纳和捕获来自被测出风口的气流时,传感器模块(例如,传感器模块102)检测容积捕获元件是否已达到填充容积状态。在一个实施例中,一个或多个传感器测量从传感器到容积捕获元件的内表面的一个或多个位置的距离。例如,一个或多个传感器可以测量到容积捕获元件的最后(内部)表面(或底部)608上的一个或多个位置的距离。如果测量的距离小于指示完全填充的容积捕获元件的预期或预定测量距离,则容积捕获元件尚未被填充,并且继续进行距离测量。作为示例,传感器可以测量到底面608上的点的距离,并且在图6中,测量的距离不足以指示填充的容积捕获元件并停止计时器。如图6所示,底部608尚未完全延伸到其最后面的填充位置,并非所有的角部(例如,角部606)都已到达指示填充容积的位置,并且侧面612和610尚未完全扩展到指示完全填充容积的位置(和距离)。
46.在优选实施例中,lidar传感器被用于检测容积捕获元件何时达到填充容积状态,并且当检测到填充容积状态时,计时器停止。例如,lidar传感器可以重复测量从内部框架结构表面上的传感器位置到定向至袋502的底部608的点的范围/距离。如图6所示,如果底部608尚未达到填充容积距离,则传感器继续进行范围测量。在另一示例中,lidar传感器可以被定向到多个(目标)位置,并且可以重复地测量到这些目标位置的距离以指示填充容积。例如,当多个目标位置达到预定范围/距离测量值时,lidar传感器可以检测填充容积。lidar传感器可以被配置成检测到例如底部608的角部的距离,指示容积捕获元件还没有处
于其充满状态。
47.最后,图7示出了图4中容积填充气流测量装置的填充容积。如图所示,容积捕获元件的底部608和侧面612和610完全展开,使得底部608以及角部606和701已经到达视觉上指示容积捕获元件处于充满状态的位置(以及与框架接合面410的距离)。在优选实施例中,当传感器模块检测到容积捕获元件已达到充满状态时,计时器停止,并且经过的时间被测量装置的cpu用来基于容积捕获元件的容积以及快门被释放(和计时器启动)的时刻与传感器模块检测到容积充满状态的时刻之间所述经过的时间来计算(和显示)气流速率。
48.在优选实施例中,一旦框架快门被释放并且计时器启动,lidar传感器可以例如以预定频率连续地或重复地/周期性地测量从传感器位置到容积捕获元件(袋)502的底面608上的位置的范围/距离。在一些实施例中,lidar传感器可被用于检测距离的变化率,这随后可被用于确定容积捕获元件的充气的算法中。如图7所示,如果底部608已经达到填充容积距离(从安装在框架上的传感器),则计时器停止并且计算和显示气流速率,并且存储数据。在另一示例中,lidar传感器可以被导向至多个(目标)位置,并且可以重复地测量到这些目标位置的距离以指示填充容积(并且停止计时器)。例如,lidar传感器可被导向至检测到底部608以及底角部606和702的距离。如果容积捕获元件(袋)已达到其充满状态,如图7所示,lidar传感器与底部608以及底角部606和702中的每一个之间的距离将等于或大于容积捕获元件的内表面上这些位置各自的预定充满状态值,此时计时器停止并计算和显示气流速率,并且存储数据。如前所述,在一些实施例中,lidar传感器可以扫描容积捕获元件的内表面的至少一部分以检测容积充满状态。例如,lidar传感器可以被配置为在预定范围内扫描底面608的检测,指示底面608的预定范围处于使得容积捕获元件(袋)502处于容积充满状态的位置。一旦检测到容积充满状态,计时器停止并且微处理器/cpu/mcu(可以包括在电子装置422中)计算被测试的出风口402的气流速率,并且随后可以例如在oled或其他类型的显示器上显示气流速率。
49.如前所述,在一些实施例中,其他类型的传感器可被用于检测容积充满状态。作为一个示例,压力传感器可被用作传感器模块的一部分,用于检测容积捕获元件何时达到容积填充条件/状态。例如,一旦袋材料502完全展开并且不能再容纳来自被测试出风口的气流时,压力传感器可以检测到压力的增加。在又一示例中,传感器模块可包括流量敏感阀开关,该阀开关通过在容积捕获元件填充时保持关闭,直到足够的压力导致阀打开,允许从框架和容积捕获元件组件内部排出气流,来检测容积捕获元件何时达到容积充满状态。
50.图8示出图4所示容积填充气流测量装置的示例性局部内部透视图800。在一些实施例中,容积捕获元件可以使用紧固构件810和多个紧固件824紧固地固定到框架结构的内表面826,使得容积捕获元件材料(具有边缘或接缝604和内底面828)在z轴方向上延伸超出框架结构后边缘822,远离由前面410限定的框架开口。如图8所示,紧固构件在靠近前面410的边缘812与向后远离前面410的边缘814之间具有(z轴)宽度,并且(袋)紧固构件810优选地定位在比框架结构的正面410更靠近框架的外(最后)内边缘822的位置,使得传感器光学元件806可以定位在正面410和容积捕获元件紧固构件810之间。在这种取向中,传感器光学元件806优选地定位成对容积捕获元件的内表面(例如,内底面828、边缘604等)具有足够的视线(line-of-sight)。
51.参照图4至图7,图8示出示例性框架结构的角部的局部视图。垂直延伸的框架结构
被示出为具有内表面826(传感器光学元件806被示出为位于内表面826上)和前接合面410,内表面826在向内的前面内边缘820和向外的最后端内边缘822之间具有z轴/z方向尺寸,前接合面410在前面内边缘820和前面外边缘818之间具有y轴/y方向尺寸。水平延伸的框架结构被示出为具有内表面和前接合面410,内表面在向内的前面内边缘816和向外的最后端内边缘822之间具有z轴/z方向尺寸,前接合面410在前表面内边缘816和前表面外边缘/顶面418之间具有x轴/x尺寸。尽管前面410的尺寸418-816(水平延伸)和818-820(垂直延伸)被示出为相同(并且可包括约1.5英寸的尺寸),水平和垂直前面尺寸也可不同。同样地,z方向尺寸816-822(水平延伸)和820-822(垂直延伸)被示出为基本相同(并且可包括大约3.5英寸的尺寸),水平延伸和垂直延伸的框架结构的z轴尺寸也可以不同。
52.在一些实施例中,传感器模块(例如,传感器模块102)可包括安装在框架内表面826上的传感器壳体808内的传感器电子元件108和一个或多个传感器124、126,如图所示。导线804、802(或布线电缆802、804)可电连接电子装置422和外壳808,并且布线可以通过延伸穿过818-820框架结构的孔(未示出)馈电。在优选实施例中,传感器模块包括电子器件422、布线802、804、外壳808和光学元件(或光学外保护壳)806。在优选实施例中,电子装置422可以包括cpu(例如,cpu 110),传感器壳体808可以包括传感器电子装置(例如,传感器电子装置108)和一个或多个传感器(例如,传感器124、126),所述一个或多个传感器包括如图2所述的lidar传感器并具有光学元件(例如,光学元件218、220),其被配置为经由穿过光学外保护壳806的视线光学地检测容积捕获元件的一个或多个内表面(例如,具有内底面828)。
53.在其他实施例中,传感器模块可包括外壳808内的电子元件122和压力传感器以及网罩806,通过网罩806可感测容积捕获元件和框架结构内的压力变化,并经由布线802、804将其传输至电子元件422。在其他实施例中,传感器模块可包括外壳808内的电子元件122和压敏阀开关以及网罩806,当容积捕获元件和框架内的压力超过预定阀开度值时,来自被测目标出口的气流可穿过网罩806。
54.图9示出图8所示的容积填充气流测量装置的示例性局部透视图900,前接合面410包括密封垫片和滤网908,滤网908延伸穿过由接合面410限定的区域。垫片被示出为宽度尺寸(x和y方向)在902和904之间(相应的框架结构宽度尺寸(x和y方向)在418和906之间)。尽管是可选的,但本发明人通过对所述实施例的测试和开发而发现并确定,所述密封垫片改善了框架结构和待测量目标出风口周围的表面之间的密封,从而减少气流泄漏,并提高气流速率测量的效率和准确率(以及测量的重复性)。例如,垫片可包括1/8英寸到1/4英寸厚(如在z方向上测量)的可压缩防风雨条材料,例如用于住宅门或商业门的防风雨条材料。
55.在优选实施例中,图9所示的滤网908优选地延伸到框架开口上方(由前面410限定),并且可以从前面410稍微向后(在z方向)插入。滤网908优选地包括尺寸为允许来自目标通风口(例如通风口402)的气流流过框架结构并填充的开口容积捕获元件(袋)。本发明者发现(网状)筛孔可以是各种尺寸中的任何一种。发现用于典型住宅或商业窗户开口的筛网效果良好。可使用具有较大网孔的筛分,例如具有1/8至1/4英寸
×
1/8至1/4英寸的网孔。可使用较大或较小的筛网开口。校正系数可用于计算测量的气流速率(如方法步骤318中所述),校正系数基于具有不同开口尺寸的不同筛网材料的经验气流阻力。
56.在优选实施例中,滤网908基本上如图9所示位于前接合面410附近(在z方向上),
并且在快门处于关闭的未缩回位置时,允许容积捕获元件(袋)以容积塌缩的未填充状态存放在滤网908和快门材料428之间。在填充容积捕获元件之后,例如在如图7所示的气流测量期间,用户可以例如将具有接合面410的框架和容积捕获元件放置在水平表面上。然后,在关闭快门材料428之前,用户可以使容积捕获元件塌缩并折叠、卷绕或简单地将袋材料推向滤网908,以在快门材料和滤网908之间容纳容积捕获元件。
57.本发明人发现并确定了容积填充测量装置及其方法的所述实施例,从而改进了测量来自出口风口的气流的技术。具体地,所描述的实施例提供了具有已知填充容积的容积填充(或袋充气)装置,该装置易于塌缩至未填充状态并存储/容纳在轻量简单的框架结构中,该框架结构容易被用户保持并放置在待测试的出风口上。该装置使用可伸缩快门,该可伸缩快门以可预测和可靠的方式打开,以减少一个测量到下一个测量的可变性。容积捕获元件(袋)尺寸(侧面和底部尺寸以及材料厚度)和材料特性被选择为允许在合理时间内(通常在一分钟以下,以秒为单位测量)完全充气,并使同一目标出风口的连续(重复)气流测量之间的变化最小化。框架结构的尺寸优选能够密封地围绕在标准尺寸和定向的hvac出风口上。使用了电子器件和电子感测,例如lidar传感器,以提高当容积捕获元件达到充满状态时的检测和确定快门打开和容积充满状态之间所经过的时间的可重复性、准确性和一致性。所描述的实施例还允许自动气流计算、气流速率测量的可视显示、以及以电子方式保存、记录和传送测量相关数据。这些和附加的优点和改进由本文的前述实施例和描述提供。
58.上述内容中使用的术语和表达是作为描述而非限制性术语使用的,使用这些术语和表达无意排除所示和描述的特征或其部分的等效物,应当认识到,本发明的范围仅由所附权利要求来限定和限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1