成像流式细胞仪、分选方法以及校准方法与流程
1.本发明涉及一种使用图像对细胞等对象物进行分选的成像流式细胞仪、分选方法以及校准方法。
背景技术:
2.一般而言,对细胞等对象物进行分选的流式细胞仪具有:检测来自对象物的信号的检测部;基于由检测部得到的信号,判断是否为特定的对象物的分选判断部;和基于分选判断部的判断结果,对对象物进行分选的分选部(例如,专利文献1)。为了提高对象物的分选精度,需要使分选部与特定的对象物到达分选部的时机一致地进行动作。
3.在现有的流式细胞仪中,分选判断部进行信号处理所需要的时间较短,大致在1毫秒以内。现实上,在流路中流动的对象物具有基于对象物的速度偏差。例如,大小不同的细胞有时速度不同。另外,即使是相同大小的细胞,在流路内的中心附近流动的细胞的速度也变快。
4.与此相对,通过缩短从检测部到分选部的距离,能够抑制对象物的速度偏差的影响。因此,在现有的流式细胞仪中,一般不考虑对象物的速度偏差,在对象物通过检测部之后,在经过一定的延迟时间的时机使分选部动作。
5.另一方面,在使用图像判断是否是特定的对象物的成像流式细胞仪中,有时用于取得必要的信息的信号处理时间变长,例如,有时需要2~32毫秒左右的时间。在这种情况下,需要延长从检测部到分选部的距离。当不考虑对象物的速度偏差,在对象物通过检测部后,在经过一定的延迟时间的时机使分选部动作时,由于速度偏差的影响,分选精度降低。
6.为了抑制由于这样的速度偏差引起的分选精度的降低,提出了具有测量各个对象物的速度测量部的结构。例如,在专利文献1中,公开了使用光栅(衍射光栅)的速度测量部。另外,在非专利文献1中,公开了如下结构:在对象物流动的流路的上游侧和下游侧配置激光点(laser spot),根据对象物通过各激光点的时机,测量各个对象物的速度。
7.另外,在专利文献2中,公开了如下方法:对对象物进行时滞拍摄并根据每帧的对象物的位置变化计算其速度,并预测各个对象物到达分选部的时机。
8.现有技术文献
9.专利文献
10.专利文献1:美国专利第6,532,061号公报
11.专利文献2:国际公开第2011/105507号
12.非专利文献
13.非专利文献1:n.nitta et al.,intelligent image-activated cell sorting.cell175,266-276(2018)
14.在如专利文献1那样使用光栅的速度测量部中,在多个对象物以接近的状态在流路中流动的情况下,难以测量各个对象物的速度。
15.另外,即使能够测量各个对象物的速度,在专利文献1中也分别独立地进行速度信
号和细胞分选的计算,将这些结果输入到延迟处理电路来控制分选部。因此,无法确保将由照相机拍摄的各个图像和由速度测量部测量的各个对象物的速度准确地并一一对应地进行关联。当来自不同的对象物的图像的处理结果和速度信息被错误地关联时,由于无法正确地进行分选而成为问题。具体而言,在以较高的吞吐量使对象物在流路中流动的情况下,各个对象物的信号间隔变窄,根据情况,信号重复地埋没,有时在关联上引起错误。或者,在测量对象物较小的情况下等,虽然在照相机中被识别但在速度检测部中无法被检测到的情况下,也可能会在信号的一一对应中发生错误。
16.如非专利文献1那样,根据使用两个激光点的结构,即使对于接近的多个对象物,也能够测量各个对象物的速度。但是,在使用两个激光点的结构中,为了进行速度检测,除了用于细胞的摄像的激光照射之外,还需要另外准备用于速度检测的对两处的激光照射,装置规模大。进而,由于速度检测和细胞摄像的信号发出的时机依赖于各个激光点的位置,因此只要激光点的位置不完全一致,就会在时机产生错开。需要用于对应于该错开的校准,操作变得复杂。
17.另外,为了进行在流式细胞仪中流动的粒子的摄像或检测,通常使用物镜,但是从物镜得到的视野(field of view)是有限的。在非专利文献1的方法中,至少需要将速度测量用的2点和图像摄像用的1点收纳在物镜的视野内,但为了防止光的泄漏等,需要在点之间隔开一定程度的间隔。因此,特别是在图像摄像用中想要设定多个点的情况下等,在物镜的视野中的激光点的场所的取得成为课题。例如,在想要分别对照射不同波长的激发光时所得到的荧光图像进行拍摄的情况下,考虑对于不同波长的每个激发光位置分离地设置激光点。但是,在这种情况下,进一步在速度检测用中设定2点成为设计上的负担。
18.在专利文献2中,公开了摄像机对在流路中流动的细胞进行时滞拍摄,通过从该一连串的图像进行细胞的跟踪来进行可靠的细胞分离的方法。然而,在专利文献2所记载的方法中,为了从一连串的时滞图像追踪细胞,需要较大的计算负荷。进而,为了进行细胞的追踪,需要在包含细胞分类部的广视野下进行拍摄,因此,为了以高空间分辨率拍摄细胞图像,画面整体的像素数变得非常大,信息处理的负荷变高,另一方面,由于减少像素数会牺牲空间分辨率,因此存在不能得到细胞的详细的形态信息等的界限。
技术实现要素:
19.本发明的目的在于,提供一种能够以简单的结构考虑了对象物的速度偏差的分选精度高的成像流式细胞仪、分选方法以及校准方法。
20.本发明的第一观点是一种成像流式细胞仪,其具有:
21.激光单元,所述激光单元向粒子流动的流路上的第一点以及第二点分别照射第一激光以及第二激光;
22.第一摄像部,所述第一摄像部对所述第一点进行拍摄;
23.第二摄像部,所述第二摄像部对所述第二点进行拍摄;
24.第一检测器,所述第一检测器检测通过所述第一点的所述粒子;
25.第二检测器,所述第二检测器检测通过所述第二点的所述粒子;
26.第一粒子检测部,所述第一粒子检测部基于所述第一检测器以及所述第二检测器所取得的信号,检测所述粒子,并且对所述第一摄像部以及所述第二摄像部发出指示摄像
时机的摄像时机指示信号;
27.系统时间管理部,所述系统时间管理部对所述第一粒子检测部发出系统时间;
28.图像存储部,所述图像存储部接收所述第一摄像部以及所述第二摄像部所拍摄的图像;以及
29.分选判断部,所述分选判断部判断所述粒子是否为对象粒子,
30.所述第一摄像部以及所述第二摄像部基于所述摄像时机指示信号,切取(提取、剪切)出所拍摄的所述粒子的图像。
31.本发明的第二观点是一种分选方法,包括:
32.激光单元分别对粒子流动的流路上的第一点以及第二点照射第一激光以及第二激光,
33.第一检测器检测通过所述第一点的所述粒子,
34.第二检测器检测通过所述第二点的所述粒子,
35.基于所述第一检测器以及所述第二检测器取得信号的摄像时机,第一摄像部对所述第一点进行拍摄并且第二摄像部对所述第二点进行拍摄,切取出所拍摄的所述粒子的图像,
36.分选判断部判断所述粒子是否为对象粒子,
37.基于所述第一检测器以及所述第二检测器取得信号的时机,计算直到所述粒子到达分选部的延迟时间,
38.根据所述分选判断部的判断结果,所述分选部基于所述粒子的延迟时间对所述对象粒子进行分选。
39.本发明的第三观点是一种校准方法,包括:
40.激光单元分别对粒子流动的流路上的第一点以及第二点照射第一激光以及第二激光,
41.第一检测器检测通过所述第一点的所述粒子,
42.第二检测器检测通过所述第二点的所述粒子,
43.基于所述第一检测器以及所述第二检测器取得信号的时机,计算直到所述粒子通过检测位置的到达预测时间,所述检测位置位于所述流路上比所述第一点以及所述第二点靠下游的位置,
44.检测通过所述检测位置的所述粒子,检测所述粒子到达所述检测位置的到达时间,
45.基于所述到达时间来调整所述到达预测时间。
46.发明效果
47.根据本发明,能够提供一种能够以简单的结构考虑了对象物的速度偏差的分选精度高的成像流式细胞仪、分选方法以及校准方法。
附图说明
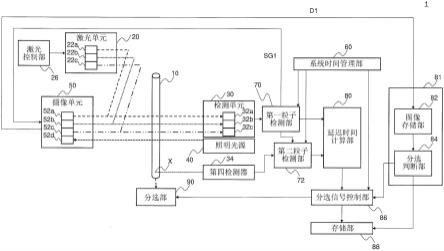
48.图1是第一实施方式的成像流式细胞仪的结构图。
49.图2(a)是点周边的流路的放大图,图2(b)是激光的强度曲线图。
50.图3是摄像部的结构图。
51.图4是第二实施方式的成像流式细胞仪的结构图。
52.图5是表示校准方法的一例的图。
53.符号说明
[0054]1ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
成像流式细胞仪
[0055]
10
ꢀꢀꢀꢀꢀꢀꢀꢀ
流路
[0056]
20
ꢀꢀꢀꢀꢀꢀꢀꢀ
激光单元
[0057]
22a
ꢀꢀꢀꢀꢀꢀꢀ
第一激光光源
[0058]
22b
ꢀꢀꢀꢀꢀꢀꢀ
第二激光光源
[0059]
22c
ꢀꢀꢀꢀꢀꢀꢀ
第三激光光源
[0060]
25a
ꢀꢀꢀꢀꢀꢀꢀ
第一点
[0061]
25b
ꢀꢀꢀꢀꢀꢀꢀ
第二点
[0062]
25c
ꢀꢀꢀꢀꢀꢀꢀ
第三点
[0063]
25d
ꢀꢀꢀꢀꢀꢀꢀ
第四点
[0064]
26
ꢀꢀꢀꢀꢀꢀꢀꢀ
激光控制部
[0065]
30
ꢀꢀꢀꢀꢀꢀꢀꢀ
检测单元
[0066]
32a
ꢀꢀꢀꢀꢀꢀꢀ
第一检测器
[0067]
32b
ꢀꢀꢀꢀꢀꢀꢀ
第二检测器
[0068]
32c
ꢀꢀꢀꢀꢀꢀꢀ
第三检测器
[0069]
34
ꢀꢀꢀꢀꢀꢀꢀꢀ
第四检测器
[0070]
40
ꢀꢀꢀꢀꢀꢀꢀꢀ
照明光源
[0071]
50
ꢀꢀꢀꢀꢀꢀꢀꢀ
摄像单元
[0072]
52a
ꢀꢀꢀꢀꢀꢀꢀ
第一摄像部
[0073]
52b
ꢀꢀꢀꢀꢀꢀꢀ
第二摄像部
[0074]
52c
ꢀꢀꢀꢀꢀꢀꢀ
第三摄像部
[0075]
52d
ꢀꢀꢀꢀꢀꢀꢀ
第四摄像部
[0076]
60
ꢀꢀꢀꢀꢀꢀꢀꢀ
系统时间管理部
[0077]
70
ꢀꢀꢀꢀꢀꢀꢀꢀ
第一粒子检测部
[0078]
72
ꢀꢀꢀꢀꢀꢀꢀꢀ
第二粒子检测部
[0079]
80
ꢀꢀꢀꢀꢀꢀꢀꢀ
延迟时间计算部
[0080]
81
ꢀꢀꢀꢀꢀꢀꢀꢀ
图像解析部
[0081]
82
ꢀꢀꢀꢀꢀꢀꢀꢀ
图像存储部
[0082]
84
ꢀꢀꢀꢀꢀꢀꢀꢀ
分选判断部
[0083]
86
ꢀꢀꢀꢀꢀꢀꢀꢀ
分选信号控制部
[0084]
88
ꢀꢀꢀꢀꢀꢀꢀꢀ
存储部
[0085]
90
ꢀꢀꢀꢀꢀꢀꢀꢀ
分选部
[0086]
100
ꢀꢀꢀꢀꢀꢀꢀ
apd
[0087]
102
ꢀꢀꢀꢀꢀꢀꢀ
afe
[0088]
104
ꢀꢀꢀꢀꢀꢀꢀ
adc
[0089]
106
ꢀꢀꢀꢀꢀꢀꢀ
fpga
[0090]
108
ꢀꢀꢀꢀꢀꢀꢀ
gbe
[0091]
110
ꢀꢀꢀꢀꢀꢀꢀ
apd控制高压电源
[0092]
p
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
粒子
[0093]
sg1
ꢀꢀꢀꢀꢀꢀꢀ
摄像时机指示信号
[0094]
d1
ꢀꢀꢀꢀꢀꢀꢀꢀ
图像
具体实施方式
[0095]
《第一实施方式》
[0096]
以下,参照附图对第一实施方式的成像流式细胞仪1进行说明。图1是本实施方式的成像流式细胞仪1的结构图。本实施方式的成像流式细胞仪1判断在流路10中流动的粒子p是否是成为分选对象的对象粒子,并对对象粒子进行分选。粒子p例如为液滴(beads)、细胞和细胞块(血球细胞、骨髓细胞、淋巴细胞、循环癌细胞、血管内皮细胞、血小板、血小板凝集块、卵子、精子、受精卵、球状细胞、类器官等)、细胞器(染色体、叶绿体、线粒体等)、微生物、寄生虫、花粉、藻(衣藻、眼虫等)。多个粒子p在流路10中以一定的方向(轴向)流动。
[0097]
成像流式细胞仪1主要具有激光单元20、检测单元30、第一粒子检测部70、摄像单元50、系统时间管理部60和图像解析部81。
[0098]
激光单元20至少具有两个激光光源。本实施方式的激光单元20具有第一激光光源22a、第二激光光源22b和第三激光光源22c。各激光光源22a、22b、22c优选照射彼此不同的波长的激光。
[0099]
第一激光光源22a对流路10上的第一点25a照射第一激光。第二激光光源22b对流路10上的第二点25b照射第二激光。第三激光光源22c对流路10上的第三点25c照射第三激光。图2(a)表示点周边的流路10的放大图。
[0100]
在此,流路10的内径w1约为200μm。各点25a~25c在与流路10的轴正交的方向上延伸。与流路10的轴正交的方向的点25a~25c的宽度例如为80μm~100μm。粒子p的直径例如为20μm。
[0101]
各点25a~25c在流路10的轴向上位于彼此分离的位置。各点25a~25c也可以以等间隔配置。关于各点25a~25c的配置,将在后面叙述。
[0102]
图2(b)表示激光的强度曲线图的一例。激光优选在与流路10的轴正交的方向上具有一定的强度。
[0103]
检测单元30至少具有两个检测器。本实施方式的检测单元30具有第一检测器32a、第二检测器32b和第三检测器32c。第一检测器32a检测粒子p通过第一点25a时发出的散射光。同样地,第二、第三检测器32b、32c分别检测在粒子p通过第二、第三点25b、25c时发出的散射光。
[0104]
在此,第一点25a与第二点25b之间的距离l1是由第一摄像部52a上的线传感器(line sensor,行传感器、线性传感器)100与第二摄像部52b上的线传感器100之间的距离以及后述的成像光学系统的光学倍率来决定的,因此能够根据这些设计值进行计算。因此,能够根据粒子p通过第一点25a和第二点25b的时机(timing)信息,对每个粒子计算粒子p的速度。
[0105]
第一粒子检测部70基于检测单元30检测出的散射光,检测粒子p通过各点25a~
25c的时机。在此,如后所述,从系统时间管理部60向第一粒子检测部70发出系统时间。因此,第一粒子检测部70取得粒子p通过各点25a~25c的时机的系统时间。
[0106]
第一粒子检测部70对检测出的粒子p以粒子单位赋予识别编号。另外,第一粒子检测部70将粒子p通过各点25a~25c的时机的系统时间与对粒子p赋予的识别编号一起输出到后述的延迟时间计算部80。
[0107]
第一粒子检测部70将摄像时机指示信号sg1与各粒子p的识别编号一起,向摄像单元50发送。
[0108]
摄像单元50具有至少两个摄像部。本实施方式的摄像单元50具有第一摄像部52a、第二摄像部52b、第三摄像部52c和第四摄像部52d。第一摄像部52a对第一点25a进行拍摄。同样地,第二、第三点52b、52c分别对第二、第三点25b、25c进行拍摄。关于第四摄像部52d,将在后面叙述。
[0109]
包括透镜的成像光学系统配置在第一~第四摄像部52a~52d与流路10上的第一~第四点25a~25d之间。成像光学系统被配置成使得第一~第四点25a~25d上的图像分别成像在第一~第四摄像部52a~52d上的线传感器100上。在此,点25a~25d的宽度例如为80μm~100μm。第一~第四摄像部52a~52d上的线传感器100的宽度例如为10mm~80mm。成像光学系统的倍率例如为100倍~1000倍。
[0110]
各摄像部52a~52d基于来自第一粒子检测部70的摄像时机指示信号sg1,切取出粒子p的图像d1。另外,各摄像部52a~52d将被切取的粒子p的图像d1和粒子p的识别编号发送到后述的图像存储部82。
[0111]
在此,对各点25a~25c的配置进行说明。第一~第三摄像部52a~52c、成像光学系统以及流路10优选固定为,在流路10中流动的粒子p的像分别成像在第一~第三摄像部52a~52c上的线传感器100(后述)上。在这种情况下,对各点25a~25c的位置进行微调整,以使通过各点25a~25c的粒子p的像成像在第一~第三摄像部52a~52c上的线传感器100上。由此,各点25a~25c之间的距离由第一~第三摄像部52a~52c上的各线传感器100之间的距离以及成像光学系统的光学倍率来决定。由此,能够根据在流路10中流动的粒子p通过各点25a~25c的时机差的测量值来计算各粒子p的移动速度。或者,与此相反,在流路10中流动的粒子p的移动速度已知的情况下,能够计算该粒子p通过各点25a~25c的时机差。
[0112]
例如,在激光单元22与流路10之间分别设置能够相对于第一~第三的各激光进行角度调整的镜。通过调整镜的角度,能够调整各点25a~25c的位置。
[0113]
第一~第四摄像部52a~52d分别具有同样的结构。以下,参照图3说明各摄像部的结构。图3表示第一摄像部52a的结构的一例。第一摄像部52a具有线传感器100。线传感器100例如是雪崩光电二极管阵列(apd阵列)、光电二极管阵列(pd阵列)、光电倍增管阵列(pmt阵列)。线传感器100根据接收到的图像,从各元件输出信号电流或者信号电压。该输出在所有像素中并行,但也可以切换多个像素的输出并以时分方式与后级连接。
[0114]
图3所示的例子的线传感器100是apd阵列。线传感器100沿第一点25a延伸的方向延伸。在使用apd阵列的情况下,apd控制高压电源110控制施加电压,控制成相对于由温度变化等引起的增益特性等的变化而言,输出恒定。在使用apd阵列以外的受光元件的情况下,连接控制元件的偏置电压或者偏置电流、增益等的控制电路。
[0115]
从线传感器100输出的电流或者电压在模拟前端(afe)电路102被放大,转换为能
够进行ad转换的电压。在必要的情况下,也可以在apd阵列100与模拟前端电路102之间连接将电流转换为电压而进行放大的跨阻放大器(tia)电路。模拟前端电路102与apd阵列100的所有像素的输出并联连接,但也可以切换多个像素的输出并以时分方式与后级连接。
[0116]
模拟前端电路102的输出被作为电压信号输入到ad转换器104。向ad转换器104的输入与模拟前端电路102的所有像素的输出并联连接,也可以切换多个模拟前端电路102的输出并以时分方式与后级的ad转换器104连接。
[0117]
在ad转换器104与模拟前端电路102的所有像素的输出并联连接的情况下,ad转换器104的采样速率例如,当使粒子p通过流路的速度为vm/s。将粒子的流动方向上的图像的1个像素的大小设为xμm时,设为v/x
×
106samples/s以上。
[0118]
通过ad转换器104转换成数字信号的行图像被输入到fpga106。fpga106可以是搭载有成为图像缓冲器的内部存储器的fpga(field programmable gate array:现场可编程门阵列)、将fpga和dram(dynamic random access memory:动态随机存取存储器)等外部存储器组合的结构、将fpga置换为专用或者通用的逻辑电路的结构、将微处理器和存储器组合的计算机系统。
[0119]
行图像(line image)在fpga106内存储一时机间量的数据,当输入摄像时机信号sg1时,根据由摄像时机信号sg1指定的时机切取出预先指定的周边的以一定时间所取得的图像,附加与时机信号sg1对应的时间信息或者拍摄的粒子p的识别编号并输出。此时,也可以在fpga106中将2行以上的图像通过累计等运算处理构成为1行的图像,延长数据的位(bit)长,扩大动态范围进行输出。另外,也可以压缩图像来降低数据量。在数据的压缩中,除了可变长度编号以外,也可以利用图像数据的时间方向或者空间方向的冗余性。另外,也可以解析在此得到的图像,计算与细胞的结构、形状对应的特征量等,并将附加在图像上的信息或者图像作为独立的信息与识别编号一起输出。
[0120]
切取出的图像d1或者图像信息d1从网络接口108作为数据包,经由网络向图像存储部82(后述)输出。网络接口108例如是1gb以太网(gbe)、10gb以太网等频带不同的网络接口。或者,切取出的图像d1或者图像信息d1通过pcie、高速lvds等高速数字接口、usb等通用接口被输出到图像存储部82。
[0121]
另外,也可以在线传感器100的跟前配置柱面透镜或透镜阵列。由此,能够提高聚光效率。另外,也可以在线传感器100的跟前配置带通滤波器。由此,能够提高特异性。另外,也可以在线传感器100的跟前配置狭缝。由此,能够提高流动方向的空间分辨率。
[0122]
系统时间管理部60例如由每隔一定时间进行值变化的系统时钟和对系统时钟进行计数的计数器构成。系统时间管理部60保持系统整体的系统时间,发出该系统时间。由系统时间管理部60发出的系统时间被发送到第一粒子检测部70、后述的第二粒子检测部72和后述的分选信号控制部86。
[0123]
图像解析部81包括图像存储部82和分选判断部84。图像存储部82将摄像单元50拍摄的图像d1与各粒子p的识别编号一起接收。图像存储部82也可以是具有输入图像d1的网络接口或者通用的接口,搭载有成为图像缓冲器的内部存储器的fpga、将fpga和dram等外部存储器组合的结构、将fpga置换为专用或者通用的逻辑电路的结构、将微处理器和存储器组合的计算机系统。
[0124]
分选判断部84判断粒子p是否为对象粒子。具体而言,分选判断部84通过解析从图
像存储部82输出的粒子p的图像,判断粒子p是否为对象粒子。然后,分选判断部84将判断结果与粒子p的识别编号一起向后述的分选信号控制部86、存储部88输出。
[0125]
分选判断部84能够根据成为对象的粒子的种类使用各种图像解析方法。例如,使用根据图像计算1以上的特征量,根据其分布对粒子p进行分类的方法、对特征量的分布通过svm(support vector machine:支持向量机)等机械学习进行分类的方法、通过对图像应用深层学习来进行分类的方法等。
[0126]
除此之外,如美国专利第6,211,955号公报所记载的那样,分选判断部84也可以使用根据细胞核内部的荧光图像通过亮点的有无进行分类的方法。
[0127]
本实施方式的成像流式细胞仪1还具有激光控制部26、第四检测器34、照明光源40、第二粒子检测部72、延迟时间计算部80、分选信号控制部86、存储部88和分选部90。
[0128]
照明光源40例如是发光二极管(led)。照明光源40隔着流路10配置在与摄像单元50相反的一侧。来自照明光源40的光,通过设置在照明光源40与流路10之间的照明光学系统,照射到流路10上的第四点25d。照明光学系统例如包括一个以上的透镜。照明光学系统例如可以使用柯勒照明或者临界照明等。优选通过在照明光学系统上配置狭缝或柱面透镜等,使第四点25d以沿与流路10的轴正交的方向延伸的方式变形。
[0129]
第四摄像部52d对第四点25d进行拍摄。在此,第四摄像部52d、成像光学系统以及流路10优选固定为,在流路10中流动的粒子p的像分别成像在第四摄像部52d的线传感器100上。在这种情况下,对第四点25d的位置进行微调整,以使在第四点25d被照射的粒子成像在第四摄像部52d上。这样进行调整时,第一~第三点25a~25c与第四点25d之间的距离,由第一~第三摄像部52a~52d上的各线传感器100之间的距离以及成像光学系统的光学倍率决定。利用该情况,通过测量在流路10中流动的粒子p通过各点的时机,能够计算各粒子p的移动速度。或者,与此相反,在流路10中流动的粒子p的移动速度已知的情况下,能够计算该粒子p通过各点25a~25d的时机差。例如,能够进行角度调整的镜或者能够进行位置调整的狭缝、透镜等光学元件被设置在照明光学系统的光路上。通过调整这些光学元件的角度、位置,能够调整第四点25d的位置。或者,也能够调整照明光源40、照明光学系统整体的位置。
[0130]
第四检测器34检测流经流路10上的检测位置x的粒子p。第四检测器34例如是照相机、闪光灯照相机(strobe camera)、激光和探测器。照相机或闪光灯照相机取得检测位置x的图像,并从该图像中检测粒子p的通过。在激光和探测器中,使激光入射到探测器,取得检测位置x上的探测器的信号,根据粒子p通过检测位置x时的信号波形的变化,检测粒子p的通过。检测位置x优选为分选位置的附近。第四检测器34将检测信号输出到第二粒子检测部72。
[0131]
检测位置x位于比第一~第四点25a~25d靠下游的位置上。检测位置x优选与分选部90一致,但也可以是检测位置x不一定与分选部90一致。例如,检测位置x也可以比分选部90稍微位于上游或者下游。
[0132]
第二粒子检测部72基于第四检测器34检测出的散射光或者荧光,检测粒子p通过检测位置x的时机。另外,第二粒子检测部72接收系统时间管理部60发出的系统时间。然后,第二粒子检测部72将在第四检测器34中检测出检测信号的时机的系统时间(到达时间)与检测信号一起进行存储。即,对各检测信号赋予时间戳。
[0133]
第二粒子检测部72实时地处理来自第四检测器34的检测信号的输入和来自系统时间管理部60的系统时间的输入。
[0134]
在第四检测器34取得图像的情况下,第二粒子检测部72也可以是具有来自照相机的图像和系统时间的输入,搭载有成为图像缓冲器的内部存储器的fpga、将fpga和dram等外部存储器组合的结构、将fpga置换为专用或者通用的逻辑电路的结构、将微处理器和存储器组合的计算机系统。例如,在解析图像而知晓在图像内包含粒子p的情况下,能够将在该图像所取得的时间输入的系统时间作为粒子p的通过时间来检测粒子。在第四检测器34如探测器那样取得在时间方向连续的信号的情况下,第二粒子检测部72能够由将检测信号转换为数字信号的adc(analog digital converter:模拟数字转换器)和搭载有成为检测信号缓冲器的内部存储器以及处理电路的fpga构成。关于检测信号缓冲器和处理电路,也可以是将fpga和dram等外部存储器组合的结构、将fpga置换为专用或者通用的逻辑电路的结构、将微处理器和存储器组合的计算机系统。例如,能够通过将信号的变化为一定的阈值以上的时间作为粒子p的通过时间来检测粒子p等的方法来检测粒子。
[0135]
第二粒子检测部72向延迟时间计算部80输出赋予了与粒子p的通过对应的检测信号的系统时间(到达时间)。
[0136]
激光控制部26具有控制电路和用于控制激光的驱动电路。激光控制部26控制与摄像所使用的各点25a~25c对应的激光单元20的第一~第三激光光源22a~22c的打开/关闭、第一~第三激光的强度。
[0137]
延迟时间计算部80基于由第一粒子检测部70检测出的粒子p通过第一点25a以及第二点25b的系统时间,来直到计算粒子p到达分选部90的延迟时间。具体而言,当将粒子p通过第一点25a的系统时间设为t1,将粒子p通过第二点25b的系统时间设为t2,将第一点25a与第二点25b之间的距离设为l1,将第一点25a与分选部90之间的距离设为l2时,延迟时间δt作为δt=(l2/l1)
×
(t2-t1)而被求出。此时,在l1以及l2的值都已知的情况下,也可以使用它们的值。如上所述,由于l1能够根据设计值求出,因此在l2不确定的情况下,也可以通过校准求出系数a=l2/l1的值。
[0138]
另外,上述延迟时间δt是从粒子p通过第一点25a到粒子p到达分选部90的时间,但不限于此。延迟时间δt也可以是从粒子p通过第二点25b到到达分选部90的时间。
[0139]
延迟时间计算部80将粒子p的延迟时间与粒子p的识别编号一起输出到分选信号控制部86。
[0140]
分选信号控制部86根据分选判断部84的判断结果,为了在基于由延迟时间计算部80计算的粒子p的延迟时间来计算的时机对粒子p进行分选,发出必要的分选信号。
[0141]
由于从系统时间管理部60向分选信号控制部86发送系统时间,因此与粒子p到达分选部90的时机一致地,分选信号控制部86向分选部90发出适当的分选信号。
[0142]
在发出分选信号时,如果基于延迟时间计算的时机比系统时间晚,则在计算的时机的分选成功,输出分选信号。在基于延迟时间计算的时机比系统时间早的情况下,分选不成功,也可以不输出分选信号。该分选成功与否从分选信号控制部86向存储部88输出。
[0143]
分选信号例如是脉冲信号。脉冲信号与对象粒子到达分选部90的时机一致地发出,并传递到分选部90。或者,也可以使用另外准备的信号线来传递对时机的信息进行编码的信号。
[0144]
另外,分选部90有时将对象粒子分为两种类以上进行分选。例如,存在分为两种类进行分选的情况(2-way sorting:2路分选),分为四种类进行分选的情况(4-waysorting:4路分选)。在这样的情况下,分选判断部84将对象粒子进一步分类为多个不同的种类,其分类结果包含在分选信号中。在这种情况下,例如,能够使用脉冲信号的振幅、符号等,使脉冲信号包含分类结果。
[0145]
或者,也可以使用与脉冲信号一致的另外准备的信号线,将分类结果作为数字信号等传递到分选部90。
[0146]
另外,分选信号也可以传递将分选的时机作为开始时间来持续分选的时间宽度。在这种情况下,可以将持续分选的时间宽度作为脉冲信号的脉冲宽度进行传递,也可以使用另外准备信号线来传递对持续分选的时间宽度进行编码的信号。
[0147]
另外,粒子p到达分选部90的系统时间也可以是延迟时间计算部80、分选信号控制部86中的任一个来计算。
[0148]
也可以根据分选判断部84的判断结果,仅在粒子p是对象粒子的情况下,使分选信号控制部86发出分选信号。另外,也可以根据分选判断部84的判断结果,在粒子p是对象粒子的情况和不是对象粒子的情况下,使分选信号控制部86发出不同的分选信号。
[0149]
存储部88将从分选判断部84接收到的粒子p的判断结果与粒子p的识别编号一起进行存储。另外,存储部88根据从分选判断部84发出的判断结果,将分选信号控制部86在指定的时机是否能够发出分选信号、粒子p的分选结果与判断结果一起进行存储。
[0150]
分选部90基于从分选信号控制部86发出的分选信号,对对象粒子进行分选。分选部90基于由分选信号表示的时机,利用从分选信号控制部86接收或者存储在分选部90内部的分选窗口的信息(后述的图5的w1、w2),控制分选方向的切换。分选部90例如是液滴分选仪(droplet sorter)或片上分选仪(on-chip sorter)。
[0151]
分选部90例如为m.j.fulwyler,science150,910-911(1965)中公开的液滴分选仪。在这种情况下,分选部90具有配置在流路10的前端的喷嘴,通过喷嘴以一定周期形成液滴(droplet)。通过在形成含有对象粒子的液滴的时机对对象粒子附近的液体施加电场,对含有对象粒子的液滴选择性地使其带电。通过在液滴落下的轨迹的附近施加静电场,能够仅选择性地使含有带电的对象粒子的液滴的落下轨迹错开,通过在落下点设置回收容器,能够对对象粒子进行分选。进而,通过控制液滴带电的电荷的正负以及电荷量,将液滴的轨迹分配为不同的方向、角度,也能够将两种以上的种类的细胞分在两个以上的单独的容器进行回收。
[0152]
分选部90例如也可以是非专利文献1所公开的片上分选仪。在这种情况下,通过以跨越流路10的形式配置双膜泵(dual-membrane pump),在对象粒子通过的时机,在与流路10正交的方向上产生局部的流动而使对象粒子的轨迹错开,通过配置于下游的分支流路中向不同方向的流路分配,从而对对象粒子进行分选。关于双膜泵,例如记载于s.sakuma et al.,lab on a chip 17,2760-2767,2017中。
[0153]
以下,对使用本实施方式的成像流式细胞仪1的分选方法进行说明。首先,多个粒子p在流路10中流动。激光单元20分别对第一~第三点25a~25c照射第一~第三激光。检测单元30检测通过第一~第三点25a~25c的粒子p。第一粒子检测部70基于检测单元30所取得的信号,检测粒子p。另外,第一粒子检测部70对摄像单元50发出指示摄像时机的摄像时
机指示信号sg1。在此期间,系统时间管理部60对第一粒子检测部70发出系统时间。
[0154]
摄像单元50对第一~第四点25a~25d进行拍摄。另外,摄像单元50基于摄像时机指示信号sg1,切取出所拍摄的粒子p的图像d1。图像存储部82接收摄像单元50拍摄的粒子p的图像d1。分选判断部84判断粒子p是否为对象粒子。
[0155]
分选信号控制部86根据分选判断部84的判断结果,为了与由延迟时间计算部80计算的时机一致地地对粒子p进行分选,发出分选信号。分选部90基于分选信号对对象粒子进行分选。
[0156]
延迟时间计算部80基于检测单元30取得信号的时机的系统时间,计算直到粒子p到达分选部90的延迟时间。
[0157]
如上所述,根据本实施方式的成像流式细胞仪1、分选方法,能够以比以往简单的结构,考虑粒子p的速度偏差,提高分选精度。
[0158]
《第二实施方式》
[0159]
以下,对第二实施方式的成像流式细胞仪1进行说明。本实施方式的成像流式细胞仪1的第四检测器34、第二粒子检测部72以及延迟时间计算部80的结构与第一实施方式不同。除此以外的结构与第一实施方式相同。在本实施方式中,检测位置x位于分选部90的下游,能够检测在粒子p被分选部90分选时发生的位置的变化。
[0160]
第四检测器34例如是ccd照相机、cmos照相机等的区域传感器。在这种情况下,向检测位置x照射第四激光,在以通过向通过检测位置x的粒子p照射激光而发出的散射光或荧光入射到第四检测器34的方式配置各元件之后,取得第四检测器34的信号,获得关于粒子p通过的位置的信息。第四检测器34将检测信号输出到第二粒子检测部72。也可以代替激光而是闪光灯等用于明视野检测的照射。
[0161]
第二粒子检测部72根据粒子p的通过位置,取得在分选部中被分选的粒子或者未被分选的粒子的比例,将该值输出到延迟时间计算部80。在此,第四检测器34不需要对各个粒子p取得其通过位置信息,也可以作为针对多个粒子p的累计值而取得。例如,在分选部90中被分选的粒子p在检测位置x中的位置x1、未被分选的粒子p在检测位置x中的位置x2分别由第四检测器34检测的情况下,考虑将通过了位置x1以及位置x2的粒子的比例作为多个粒子的累计而取得。例如,在粒子p能够通过激光激发而发出的荧光来检测的情况下,通过测定来自位置x1以及x2的粒子p的荧光强度累计值之比,能够调查被分选的粒子p以及未被分选的粒子p的比例。
[0162]
延迟时间计算部80通过从第二粒子检测部72取得被分选的粒子p或者未被分选的粒子p的比例,来评价延迟时间计算方法的妥当性。例如,在全部的粒子p被分选的设定的情况下,通过调整为使得被分选的粒子p的比例最接近100%的延迟时间,能够决定分选中适当的延迟时间。另外,也能够通过一边改变延迟时间的计算方法,一边评价延迟时间计算方法的妥当性,探索最妥当的延迟时间计算方法,来进行延迟时间计算方法的校准。
[0163]
《第三实施方式》
[0164]
以下,对第三实施方式的成像流式细胞仪1进行说明。本实施方式的成像流式细胞仪1,在第一实施方式的成像流式细胞仪1中,还具有延迟时间的校准功能。具体而言,在成像流式细胞仪1中,使校准用的液滴(粒子p)流经流路10,测定通过第一点25a、第二点25b的粒子p在检测位置x被检测出的到达时间。由此,进行根据通过第一点25a、第二点25b的粒子
p计算的粒子p的到达预测时间的校准。
[0165]
在本实施方式的成像流式细胞仪中,延迟时间计算部80的结构与第一实施方式不同。除此以外的结构与第一实施方式相同。
[0166]
本实施方式的延迟时间计算部80基于由第一粒子检测部70检测出的、粒子p通过第一点25a、第二点25b的系统时间t1以及t2,来计算粒子p到达检测位置x的时间(到达预测时间)。另外,检测位置x与分选部90的距离是已知的。
[0167]
延迟时间计算部80使粒子p的识别编号与从第二粒子检测部72输出的粒子p的到达时间相关联。具体而言,延迟时间计算部36基于来自第一粒子检测部70的粒子p的到达预测时间和来自第二粒子检测部72的粒子p的到达时间,使粒子p的识别编号相关联。
[0168]
延迟时间计算部80以组的形式输出相关联的粒子p的识别编号、到达预测时间、到达时间。
[0169]
延迟时间计算部80基于粒子p的到达预测时间、到达时间,进行校准。图5表示校准方法的一例。横轴表示由延迟时间计算部80计算的点通过时间δt。在此,当将粒子p通过第一点25a以及第二点25b的时间(系统时间)设为t1、t2时,点通过时间δt成为(t2-t1)。纵轴表示粒子p的到达时间t。
[0170]
当将第一点25a与第二点25b之间的距离设为l1,将第一点25a与检测位置x之间的距离设为l2时,在粒子p进行等速运动的情况下,到达预测时间作为(l2/l1)
×
(t2-t1)而被求出。在此,通过校准求出系数a=l2/l1的值,从而在赋予了t1和t2时能够求出到达预测时间。
[0171]
延迟时间计算部80对粒子p的点通过时间δt和到达时间t进行制图,以模型式进行拟合。模型式例如是通过如图5所示的原点的直线,但不限于此。在将通过原点的直线设为模型式的情况下,模型式成为t=a
×
δt。延迟时间计算部80根据粒子p的点通过时间δt和到达时间t的制图求出系数a,从而进行校准。
[0172]
另外,延迟时间计算部80也可以代替粒子p的到达预测时间,或者除了粒子p的到达预测时间之外,还对分选窗口进行校准。在此,分选窗口表示分选部90进行分选的时间段。在图5所示的例子中,在粒子p的点通过时间为δt1的情况下,表示在包含到达时间t1的分选窗口y1的时间段进行分选。另外,在粒子p的点通过时间为δt2的情况下,表示在包含到达时间t2的分选窗口y2的时间段进行分选。分选窗口的宽度(时间的长度)可以与粒子p的延迟时间无关地恒定,也可以依赖于粒子p的延迟时间而可变。通常,在粒子p的速度快的情况下,点通过时间变短,延迟时间变小。相反,在粒子p的速度慢的情况下,点通过时间变长,延迟时间变大。在图5所示的例子中,粒子p的点通过时间越长延迟时间越大,分选窗口的宽度越宽。这是因为,由于延迟时间越大,误差越大,因此通过扩大分选窗口的宽度,能够提高分选精度。
[0173]
分选窗口也可以不必以所测定的到达时间t为中心。延迟时间计算部80能够基于粒子的点通过时间δt和到达时间t的制图来设定分选窗口。
[0174]
优选检测位置x与分选部90一致,但也可以检测位置x不必与分选部90一致。例如,检测位置x也可以比分选部90稍微位于上游或者下游。在这种情况下,也可以与检测位置x以及分选部90的位置的错开一致地,使分选窗口的中心位置从到达预测时间适当地错开,调整为在粒子p到达分选部90的时机设定分选窗口。另外,由于从分选部90的物理动作速度
的界限,在对分选部90发送分选信号之后直到粒子p被分选为止,有时会产生时滞。当将该时滞设为b时,也可以按照在粒子p到达分选部90的时机进行分选的方式,调整为使分选信号发生时机早时滞b的量。
[0175]
以下,对使用本实施方式的成像流式细胞仪1的校准方法以及分选方法进行说明。
[0176]
首先,多个粒子p在流路10中流动。激光单元20分别向第一~第三点25a~25c照射第一~第三激光。检测单元30检测通过第一~第三点25a~25c的粒子p。第一粒子检测部70基于检测单元30所取得的信号,检测粒子p。另外,第一粒子检测部70对摄像单元50发出指示摄像时机的摄像时机指示信号sg1。在此期间,系统时间管理部60对第一粒子检测部70发出系统时间。
[0177]
第二粒子检测部72基于第四检测器34所取得的信号,检测粒子p通过检测位置x的时机。
[0178]
延迟时间计算部80基于粒子p通过第一点25a以及第二点25b的时间(系统时间),计算粒子p到达检测位置x的到达预测时间。
[0179]
第二粒子检测部72检测与粒子p的通过对应的检测信号,将粒子p到达检测位置x的到达时间输出到延迟时间计算部80。
[0180]
延迟时间计算部80基于到达时间,校准并调整到达预测时间的计算式。然后,分选信号控制部86和分选部90基于调整了的到达预测时间,调整对粒子p进行分选的时机。
[0181]
如上所述,根据本实施方式的成像流式细胞仪、分选方法、校准方法,能够进一步提高分选精度。
[0182]
《第四实施方式》
[0183]
以下,对第四实施方式的成像流式细胞仪1进行说明。本实施方式的成像流式细胞仪1,在第二实施方式的成像流式细胞仪1中,还具有延迟时间的校准功能。具体而言,在成像流式细胞仪1中,使校准用的液滴(粒子p)流经流路10,测定通过第一点25a、第二点25b的粒子p在检测位置x被检测出的到达时间。由此,进行根据通过第一点25a、第二点25b的粒子p计算的粒子p的到达预测时间的校准。
[0184]
本实施方式的成像流式细胞仪的第四检测器34、第二粒子检测部72以及延迟时间计算部80的结构与第三实施方式不同。除此以外的结构与第三实施方式相同。另外,本实施方式的成像流式细胞仪的延迟时间计算部80的结构与第二实施方式不同,除此以外的结构与第二实施方式相同。在本实施方式中,检测位置x位于分选部90的下游,能够检测在粒子p被分选部90分选时发生的位置的变化。因此,在粒子p通过分选部90的时机,对分选部90发出分选信号。然后,通过评价由于粒子p被分选而引起的位置错开的比例,能够评价对分选部90发出的分选信号的时机。利用这种情况,在本实施方式中,一边改变检测到粒子p之后直到发出分选信号为止的延迟时间,一边评价在检测位置x的基于分选的位置变化,从而进行为了取得最佳延迟时间的校准。
[0185]
在本实施方式中,第二粒子检测部72根据在流路10内流动的粒子p的位置信息算出粒子p的分选成功率,并将该判定结果输出到延迟时间计算部80。另外,第二粒子检测部72不是必须要从系统时间管理部60接收系统时间。
[0186]
延迟时间计算部80基于粒子p到分选部90的到达预测时间以及粒子p的分选结果判定,来执行校准。当将粒子p通过第一点25a以及第二点25b的时间(系统时间)分别设为
t1、t2时,点通过时间δt成为(t2-t1)。当将第一点25a与第二点25b之间的距离设为l1,将第一点25a与分选部90之间的距离设为l2时,在粒子p在进行等速运动的情况下,到达预测时间作为(l2/l1)
×
(t2-t1)而被求出。另外,在产生分选信号之后直到粒子p被分选为止,有时会产生时滞。当将该时滞设为b时,为了适当地对粒子p进行分选,需要将分选信号早b地加以发出,基于到达预测时间的最佳分选信号发生时机作为(l2/l1)
×
(t2-t1)-b而求出。由于l1能够根据设计值进行计算,因此在此通过校准求出l2以及b的值,从而在赋予t1以及t2时能够求出分选信号产生的最佳延迟时间。作为校准的具体的方法,延迟时间计算部80一边使系数l2以及时滞b在一定的范围内变化,一边对分选信号控制部86进行命令,使得对在流路10中流动的各个粒子发送分选信号。分选信号控制部86向分选部90发送信号,分选部90尝试分选。第二粒子检测部72对各系数l2以及时滞b计算分选成功率,并将该判定结果输出到延迟时间计算部80。延迟时间计算部80取得系数l2以及时滞b与分选成功率的关系,从该处取得分选成功率成为最大的系数l2以及时滞b,从而执行校准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1