OFDR系统中不同测量长度的自适应补偿测量方法
ofdr系统中不同测量长度的自适应补偿测量方法
技术领域
1.本发明涉及一种提高光频域反射计系统中测量范围和空间分辨率的方法,尤其涉及一种 ofdr系统中不同测量长度的自适应补偿测量方法,属于分布式光纤传感领域。
背景技术:
2.光频域反射计(optical frequency domain reflectometer,ofdr)是分布式光纤传感中一项重要技术,最早由eickhoff等人提出并证明。随着ofdr技术的成熟,它逐渐被应用到温度、应变、振动以及电磁场等参数的测量。在光频域反射系统中,可调谐光源(tls)输出光被分为两束,一束为参考光,另一束为探测光。来自待测光纤菲涅尔反射光和后向散射光与参考光发生拍频干涉,产生拍频信号。待测点位置和拍频频率存在一一对应关系,通过傅里叶变换对拍频信号进行处理,就可以得到待测光纤上待测光纤的沿线反射点位置信息。
3.由于激光器的非线性扫频,导致拍频信号经过傅里叶变换后得到的频谱展宽,无法准确恢复出待测信息。因此对可调谐光源的非线性补偿是至关重要的。目前常见的非线性补偿方法有两种:硬件补偿法和软件补偿法。两种方法都是在原有的光路基础上添加一个相似结构的干涉仪,即辅助干涉仪,原来的测量光路为主干涉仪。硬件补偿法是辅助干涉仪输出的拍频信号作为采集卡的触发信号,实现对主干涉仪信号的等光频间隔采样,从而实现非线性补偿,但是最大测量距离只有辅助干涉仪两臂光路差的一半。而软件补偿法通过辅助干涉仪输出的拍频信号提取出可调谐光源的非线性信息,从而实现对主干涉仪拍频信号的补偿。传统的软件补偿方法有一维插值法、nufft、基于时间尺度因子补偿法、去斜滤波器法以及相位噪声补偿法等。一维插值法、nufft、基于时间尺度因子补偿法虽然降低了系统对辅助干涉仪两臂光路差的要求,但随着测量距离的增大,仍对辅助干涉仪两臂光路差有一定要求,测量距离受限。去斜滤波器法适用于长距离的测量,但是当非线性较大时,补偿效果不佳。
4.目前传统方法存在着测量距离受辅助干涉仪延迟光纤长度制约、空间分辨率差、运算速度慢等问题,难以实现在不同测量距离下仍保持高空间分辨率、高运算速度的测量。
技术实现要素:
5.发明目的:为了解决上述问题,本发明提供一种ofdr系统中不同测量长度的自适应补偿测量方法,并且提高了系统的空间分辨率。
6.技术方案:本发明提出一种ofdr系统,由可调谐激光器、第一耦合器、主干涉仪、辅助干涉仪、第一和第二探测器、第一和第二采集卡以及计算机构成;所述主干涉仪由第二耦合器、第三耦合器、环形器及待测光纤组成,所述辅助干涉仪由第四耦合器、第五耦合器、短延迟光纤、声光移频器aom组成。
7.所述第一耦合器的输入端连接可调谐激光器,所述第一耦合器的第一输出端连接第二耦合器的输入端,第一耦合器的第二输出端连接第四耦合器的输入端;所述第二耦合
器的第一输出端连接环形器的第一端,第二耦合器的第二输出端连接第三耦合器的输入端,所述环形器的第二端连接第三耦合器的输入端,所述环形器的第三端连接待测光纤,所述第三耦合器的输出端连接第一探测器的输入端,所述第一探测器的输出端连接第一采集卡的输入端,第一采集卡的输出端连接计算机;所述第四耦合器的第一输出端连接第五耦合器的输入端,第四耦合器的第二输出端通过短延迟光纤连接aom的输入端,所述aom的输出端连接第五耦合器的输入端,所述第五耦合器的输出端连接第二探测器的输入端,所述第二探测器的输出端连接第二采集卡,所述第二采集卡的输出端连接计算机。
8.所述第一耦合器将可调谐激光器的输出分为两路,第一路进入主干涉仪后,经过第二耦合器分为探测光和参考光,探测光经过环形器注入待测光纤,待测光纤产生的后向瑞利散射光经过环形器进入第三耦合器,参考光直接进入第三耦合器与后向瑞利散射光发生拍频并产生第一拍频信号;第二路进入辅助干涉仪后,经过第四耦合器分为两束光,第一束光经过短延迟光纤和aom后注入第五耦合器,第二束光直接注入第五耦合器与aom的输出发生拍频并产生第二拍频信号;第一和第二拍频信分别经过第一和第二探测器转化为电信号,第一和第二采集卡分别对第一和第二探测器的输出进行采集,采集到的第一和第二信号输入计算机进行处理,以得到待测光纤的沿线反射点位置信息。
9.上述ofdr系统中不同测量长度的自适应补偿测量方法,包括以下步骤:
10.步骤一,测量在可调谐激光源非线性扫频影响下的辅助干涉仪拍频信号c(t)和主干涉仪拍频信号s(t),其中辅助干涉仪短延迟光纤长度为lc,主干涉仪待测光纤长度为ls,分别对应两臂间时间延迟为τc、τs;
11.步骤二,求出辅助干涉仪拍频信号c(t)两两过零点之间的时间间隔,进而计算出拍频频率fc(t);
12.步骤三,用步骤二中得到的拍频频率fc(t),恢复出激光器的扫频速率γ(t);
13.步骤四,将步骤三中得到的可调谐激光源的扫频速率γ(t)在时间上积分,得到激光器的扫频曲线ν(t);
14.步骤五,将待测光纤分为n段,分别对每段按照以下方法进行补偿:;
15.步骤1,对待测光纤第i段,将扫频曲线ν(t)以该段中间位置li产生的时延τi进行平移得到ν(t-τi);其中,i=1,2,
…
,n,n为待测光纤的段数;
16.步骤2,将ν(t)和ν(t-τi)作差值,得到新的拍频频率f
ci
(t);
17.步骤3,将新的拍频频率f
ci
(t)代入辅助干涉仪信号表达式,得到新的辅助干涉仪信号c
i’(t);
18.步骤4,采用新的辅助干涉仪信号c
i’(t)来补偿主干涉仪信号s(t),得到待测光纤第i段沿线反射点的位置信息。
19.具体地,所述步骤二具体包括:采集卡的采样率为fs,辅助干涉仪拍频信号相邻两个过零点之间点数间隔结果记成数组d,点数间隔乘以采样间隔1/fs得到相邻过零点之间的时间间隔d/fs。将时间间隔d/fs乘以2再求倒数得到辅助干涉仪的拍频频率,减去aom产生的移频频率f
aom
得到辅助干涉仪真正的瞬时拍频频率f
ci
(t)=fs/2d-f
aom
。
20.具体地,所述步骤三中具体包括:辅助干涉仪拍频频率是通过对实际扫频曲线ν(t)进行时移τc并与原扫频曲线作差得到,即fc(t)=ν(t)-ν(t-τc)。为了获取扫频曲线,拍频频率公式两边都除以τc,得到fc(t)/τc=[ν(t)-ν(t-τc)]/τc,因为辅助干涉仪两臂时延τc较小,表达式右边近似看作ν’(t)即扫频速率γ(t),因此扫频速率γ(t)=fc(t)/τc。
[0021]
具体地,所述步骤六中:时延τi等于来回光纤长度2li除以真空中光速c和光纤折射率n 即:τi=2nli/c。
[0022]
具体地,所述步骤4中采用新的辅助干涉仪信号c
i’(t)来补偿主干涉仪信号s(t),具体包括:该过程非线性补偿方法是基于时间尺度因子补偿法。具体步骤:求出新的辅助干涉仪信号c
i’(t)两两过零点,并根据过零点序号差得到校正系数,采用校正系数并结合重采样将主干涉仪采样点校正为等光频间隔点,从而实现非线性补偿。
[0023]
与现有技术相比,本发明的技术方案具有以下有益技术效果:
[0024]
(1)实现不同测量距离、高空间分辨率的测量
[0025]
当辅助干涉仪两臂时延等于主干涉仪待测光纤产生的时延时,补偿效果达到最佳,本方法采用一个辅助干涉仪结构,可以产生两臂间不同时延的辅助干涉仪拍频信号,进而对不同测量距离的主干涉仪信号进行最佳补偿,实现不同测量距离、高空间分辨率的测量;
[0026]
(2)恢复出准确的光源非线性扫频曲线
[0027]
辅助干涉仪延迟臂采用短延迟光纤加aom的结构,采用短延迟光纤可以提取出更准确的光源瞬时光频,aom的引入可以增加提取出的光源瞬时光频点的数量,两者结合可以恢复出准确的光源非线性扫频曲线,从而有利于后期对主干涉仪信号的非线性补偿,提高测量空间分辨率;
[0028]
(3)运算速度快
[0029]
本发明所提出的非线性补偿方法中的算法简单,且所需要的辅助干涉仪延迟光纤短,算法数据量较小,所以本发明运算速度较于其他方法运算速度快。
附图说明
[0030]
图1是一个实施例的光频域反射计结构示意图;
[0031]
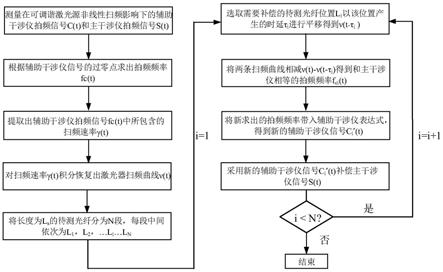
图2是一个实施例的光频域反射计中不同测量长度的自适应补偿测量方法的流程图;
[0032]
图3是一个实施例的不同测量长度的自适应补偿测量方法的示意图,其中(a)是含有非线性信息的辅助干涉仪拍频信号和拍频频率时域图,(b)是拍频频率fc(t)恢复出激光器的扫频速率γ(t)过程,(c)是恢复出的可调谐激光源的扫频速率γ(t)和扫频曲线ν(t),(d)是求出新的辅助干涉仪拍频频率的过程;
[0033]
图4是一个实施例的不同测量长度的自适应补偿测量方法补偿前后的结果,其中(a)是补偿前的结果,(b)是不同测量长度的自适应补偿测量方法补偿后的结果;
[0034]
图5是一个实施例的采用传统方法加aom和不加aom补偿后的结果,其中(a)是加了 20mhz的aom结合传统补偿方法的补偿结果,(b)是无aom的传统方法补偿结果。
具体实施方式
[0035]
为了使本技术的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本技术进行进一步详细说明。应当理解,此处描述的具体实施例仅用以解释本技术,并不用于限定本技术。
[0036]
在本文中提及“实施例”意味着,结合实施例描述的特定特征、结构或特性可以包含在本技术的至少一个实施例中。在说明书中的各个位置出现该短语并不一定均是指相同的实施例,也不是与其它实施例互斥的独立的或备选的实施例。本领域技术人员显式地和隐式地理解的是,本文所描述的实施例可以与其它实施例相结合。
[0037]
图1为一个实施例的光频域反射计结构示意图。光频域反射计中不同测量长度的自适应补偿测量方法,所述光频域反射计系统由可调谐激光器、第一耦合器、主干涉仪、辅助干涉仪、第一和第二探测器、第一和第二采集卡以及计算机构成。主干涉仪由第二耦合器、第三耦合器、环形器及待测光纤组成,进入主干涉仪的扫频光经过第二耦合器分为探测光和参考光,探测光和参考光分别注入探测臂和参考臂,探测光经过环形器注入待测光纤,待测光纤产生的后向瑞利散射光经过环形器进入第三耦合器,参考光经过参考臂进入第三耦合器与后向瑞利散射光发生拍频并产生拍频信号s(t)。辅助干涉仪由第四耦合器、第五耦合器、短延迟光纤、声光移频器(aom)组成,进入辅助干涉仪的扫频光经过第四耦合器分为两束,分别进入延迟臂和参考臂。注入延迟臂的光经过短延迟光纤和aom移频到达第五耦合器,注入参考臂的光直接到达第五耦合器,两束光发生拍频干涉并产生拍频信号c(t)。拍频信号s(t) 和c(t)经过探测器转化为电信号,再通过采集卡进行数据采集,最后输入电脑进行信号处理。
[0038]
图2为一个实施例的ofdr系统中不同测量长度的自适应补偿测量方法的流程图,具体包括如下步骤:
[0039]
步骤一,测量在可调谐激光源非线性扫频影响下的辅助干涉仪拍频信号c(t)和主干涉仪拍频信号s(t),其中辅助干涉仪短延迟光纤长度为lc,主干涉仪待测光纤长度为ls,分别对应两臂间时间延迟为τc、τs。
[0040]
在一个实施例中,辅助干涉仪拍频信号和主干涉仪拍频信号理论推导过程如下:
[0041]
由于可调谐激光源的扫频非线性的影响,扫频速率不再是定值,而是随时间随机波动的扫频速率γ(t)。扫频速率进行积分得到激光器的扫频曲线ν(t):
[0042][0043]
主干涉仪和辅助干涉仪随时间变化的拍频频率通过扫频曲线fs(t)和fc(t)经过平移作差得到:
[0044]fs
(t)=v(t)-v(t-τs)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(2)
[0045]
fc(t)=v(t)-v(t-τc)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(3)
[0046]
其中,τs和τc分别为1.5*10-6
s和1.5*10-7
s,对应的主干涉仪中待测光纤长度为150m,辅助干涉仪延迟光纤长度为30m。通过对拍频频率进行积分得到拍频信号的相位,从而得到主干涉仪和辅助干涉仪拍频信号如下:
[0047][0048][0049]
其中s0、c0分别为主干涉仪和辅助干涉仪拍频信号幅度。采集卡同时采集到辅助干
涉仪拍频信号c(t)和主干涉仪拍频信号s(t)后,接下来采用不同测量长度的自适应补偿测量方法实现沿待测光纤的非线性补偿。
[0050]
步骤二,求出辅助干涉仪拍频信号c(t)的两两过零点之间的间隔,进而计算出拍频频率 fc(t);
[0051]
该过程是根据辅助干涉仪拍频信号的过零点得到拍频频率,如图3中的(a)所示。辅助干涉仪的一个干涉臂是由短延迟光纤和声光移频器(aom)构成。aom用于提高输出拍频信号的过零点数量,为步骤四恢复可调谐激光源扫频曲线提供更多参考点,此时理论辅助干涉仪的拍频信号为:
[0052][0053]
其中c0为辅助干涉仪拍频信号的幅度,f
aom
为移频频率,设置为20mhz。接着通过插值求出过零点的横坐标,并结合采样率求出两两相邻过零点之间的时间间隔tj(j=1,2
…
k,k为总过零点间隔数),将该时间间隔补充为一个完整的周期来求两两过零点之间的频率。减去aom 的影响后,得到的辅助干涉仪拍频频率为:
[0054]
fc(t)=1/(2tj)-f
aom
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(7)
[0055]
步骤三,用步骤二中拍频频率fc(t)恢复出激光器的扫频速率γ(t);
[0056]
在一个实施例中,如图3中的(b)所示,辅助干涉仪的拍频频率为经过时移τc后的实际扫频曲线与原实际扫频曲线之差。而对扫频曲线ν(t)的求导就是扫频速率γ(t),扫频速率γ(t) 表达式如下:
[0057][0058]
其中δt趋近于0。由于辅助干涉仪两臂间时延τc较小,式(9)可改为:
[0059][0060]
结合参考图3中的(c)以及式(10)可得,因为辅助干涉仪两臂间时延τc较小,即延迟臂上的延迟光纤较短,式(10)恢复出的激光器的扫频速率γ(t)较准确。
[0061]
步骤四,将步骤三中的激光器的扫频速率γ(t)在时间上积分得到激光器的扫频曲线ν(t),表达式为:
[0062][0063]
实际的采样点是离散的,因此上述的积分过程可改:
[0064]
v(m)=v(m+1)+γ(m-1)δt(m-1)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(11)
[0065]
其中m表示第m个过零点,
△
t是第m-1到第m个过零点之间的时间间隔。
[0066]
步骤五,将待测光纤ls分为n段进行补偿,每段中间位置分别为l1,l2,
…
li…
ln。其中i代表第i段光纤中间位置,i初始化的值为1;
[0067]
步骤六,选取需要补偿的光纤位置li并将扫频曲线ν(t)以该位置产生的时延τi进行平移得到ν(t-τi);
[0068]
进行非线性补偿的时候,当待测反射点位置在最佳补偿位置附近的时候,补偿效
果最佳。最佳补偿位置即待测光纤某处产生的时延与辅助干涉仪两臂产生的时延相等。因此我们将待测光纤分为若干段,每段中间位置分别为l1,l2,
…
li…
ls。选取第i段待测光纤段产生的时延为τi,接着对扫频曲线ν(t)以该位置产生的时延τi进行平移得到ν(t-τi),与原扫频曲线作差便可得到以τi为时延的辅助干涉仪拍频频率,该过程如图3中的(d)所示。此时新的辅助干涉仪两臂时延与主干涉仪待测位置li产生的时延相等,可以实现最佳补偿。因此我们通过选取不同段待测光纤,并求出对应的时延下的辅助干涉仪拍频频率,便可实现对待测光纤任意位置的最佳补偿。
[0069]
步骤七,将步骤六中两条平移前后的扫频曲线作差值得到新的拍频频率f
ci
(t);
[0070]
步骤八,将新求出的拍频频率f
ci
(t)带入辅助干涉仪信号表达式,得到新的辅助干涉仪信号c
i’(t);
[0071]
将以时延τi时移后的扫频曲线与原扫频曲线作差得到新的辅助干涉仪拍频频率。以τi为时延的辅助干涉仪拍频频率表达式为:
[0072]fci
(t)=v(t)-v(t-τi)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0073]
将新求出的拍频频率带入表达式(6),得到新的辅助干涉仪拍频信号。新辅助干涉仪两臂时延等于所选取主干涉仪待测光纤第i段中间位置产生的时延,从而实现该段最佳补偿。
[0074]
步骤九,基于时间尺度因子补偿法,采用新的辅助干涉仪信号c
i’(t)来补偿主干涉仪信号 s(t),得到待测光纤第i段沿线反射点的位置信息。接着i=i+1,重复步骤六到步骤九直至补偿整个待测光纤。
[0075]
基于时间尺度因子补偿法(j xing,y zhang,f wang,et al.a method based on time-scalefactor for correcting the nonlinear frequency sweeping in an ofdr system[j].photonics journal, ieee,2019,11(3):1-8),具体步骤:求出新的辅助干涉仪信号c
i’(t)两两过零点,并根据过零点序号差得到校正系数,采用校正系数并结合重采样将主干涉仪采样点校正为等光频间隔点,从而实现非线性补偿。
[0076]
下面进行实验验证。主干涉仪的待测光纤长度为150m,对应的两臂时延τs=1.5*10-6
s,辅助干涉仪中延迟光纤长度为30m,对应的两臂时延为τc=1.5*10-7
s。激光器的扫频速率为 70nm/s,非线性扰动项幅值为5。采样率为312.5msa/s,采样点数为40m。aom的频率为 20mhz,系统的理论空间分辨率为0.09mm。
[0077]
将主干涉仪待测光纤均匀分为5段,每段中间位置依次为15m、45m、75m、105m以及 135m,接着采用本发明提出的不同测量长度的自适应补偿测量方法进行补偿。参考图4是采用本发明所提出的方法补偿前后的结果,其中辅助干涉仪延迟光纤长度为30m,远小于主干涉仪中待测光纤的长度。相比于图4中的(a),经过该方法补偿后,如图4中的(b)所示,空间分辨率达到0.14mm,接近理论空间分辨率的值。
[0078]
图5是在相同参数设置下,采用传统非线性补偿方法的对比结果。图5中的(a)是加了20 mhz的aom结合传统补偿方法的补偿结果,其中aom的作用是为补偿提供更多参考点。图5中的(b)是无aom的传统方法补偿结果。可以看到由于辅助干涉仪延迟光纤较短,即使加了aom,补偿效果仍不佳,空间分辨率为60mm,远大于理论空间分辨率的值。
[0079]
以上的实验结果说明:本发明所提出的可以实现较好的补偿效果,空间分辨率接近理论值。同时和传统方法相比,本发明所提出的方法可以实现当辅助干涉仪延迟光纤较
短时,通过准确恢复出扫频曲线后,对扫频曲线进行时移并与原扫频曲线作差可以得到任意延迟光纤长度下的辅助干涉仪拍频信号,从而实现任意长度的主干涉仪信号的补偿,实现不同测量距离、高空间分辨率的测量。而传统方法测量长度受限于辅助干涉仪延迟光纤长度,在相同参数设置下,传统方法的补偿效果要远差于本发明提出的非线性补偿方法。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1