一种可切换滑模观测器的双馈电机匝间短路故障检测方法
1.本发明涉及一种可切换滑模观测器的双馈电机匝间短路故障检测方法,属于电气控制领域。
背景技术:
2.定子绕组匝间短路故障是双馈异步风力发电机的一种常见故障,线圈绝缘破坏、线圈层间绝缘磨损、外部引起的机械振动等都可能引起dfig内部定子绕组匝间短路故障。当dfig发生定子匝间故障时,会伴随电流骤升、电机过热、电机烧损等现象,而dfig时常运行在戈壁、高山和海外等人迹罕至的地方,且时常伴有极端天气,如暴雪、沙尘和海啸等,人工很难及时当场维护和检修,因此寻求一种对dfig定子匝间短路故障敏感的在线识别技术对dfig长久稳定运行具有重要意义。
3.随着风力发电的不断普及,dfig的故障检测与诊断方法引起了研究人员的广泛关注,但针对不同工况下dfig的定子匝间短路故障研究仍比较欠缺,由于dfig的定、转子绕组结构与一般感应电机或变压器相似,因此针对dfig的定子匝间短路故障研究可以借鉴一般感应电机和变压器绕组匝间短路故障研究的经验,目前为止,由于相关故障特征提取较难,数据集的建立不易,故大多只用来其他故障的识别,而对定子匝间短路故障检测应用较少,并且,传统观测器无法解决风速骤变以及含干扰状态下的状态跟踪和定子匝间短路故障的检测问题。
技术实现要素:
4.本发明的目的在于解决风力发电机定子匝间短路故障检测的问题,提供了一种可切换滑模观测器的双馈电机匝间短路故障检测方法。
5.为解决上述技术问题,本发明提供了一种可切换滑模观测器的双馈电机匝间短路故障检测方法,包括以下步骤。
6.步骤一,建立基于多回路模型的双馈感应发电机定子匝间短路故障回路的电压和磁链方程,引入故障位置参数矩阵f
x
,获得自然坐标系下可表示定子绕组任意相的单相匝间短路故障的dfig(doubly-fed induction generator,双馈异步风力发电机)电压方程和磁链方程。
7.步骤二,将自然坐标系下的三相电压分量、三相电流分量和三相静止坐标系下的位置参数矩阵,运用clarke和park变换理论换算得到dq0旋转坐标下的电压方程和磁链方程和故障位置参数矩阵fa、fb、fc,以此建立dfig发生定子匝间短路故障时的动态数学模型。
8.步骤三,基于步骤二所构造的动态数学模型,建立dq0旋转坐标下dfig的状态空间模型,其中,不考虑模型中的零序分量以及故障分量,选取电流的dq轴分量为状态空间变量,电压的dq轴分量为状态空间输入向量。
9.步骤四,依据dq0旋转坐标系下定转子电流为状态变量的状态方程构造一种滑模观测器,在此基础上,加入一种可切换滑模控制律,其中存在两种类别的切换项,此时,系统
通过电流观测器获取dq0旋转坐标下的电流观测值和转子转速观测值。
10.步骤五,将转子转速观测值代入状态空间方程获得电流观测值以此构成无速度传感器的情况,再将dq0旋转坐标下的系统电流实际值与电流观测值作差,获得系统电流观测残差。
11.步骤六,基于本发明的dfig定子匝间短路故障模型,通过步骤五中的电流观测残差的方法实现定子匝间短路故障的检测。
12.本发明的优点在于。
13.(1)本发明的步骤二中,建立了基于同步旋转坐标系下的dfig定子绕组匝间短路故障数学模型,该模型可模拟任意相绕组任意程度的匝间短路故障,且由于将各三相交流量变换得到了各种恒定的dq0直流分量,易于分析计算和各种算法的使用。
14.(2)本发明的步骤四中,设计了一种基于可切换滑模观测器的故障检测方法,该方法可以在复杂工况下准确实时跟踪dfig内部电流状态并判别系统是否发生定子匝间绕组短路故障。
15.(3)本发明的步骤五和步骤六中,在定子匝间绕组短路故障发生时,系统能够通过步骤五中电流观测残差的方法快速而精准的识别故障。
附图说明
16.图1为dfig系统基于定子磁链定向的矢量控制拓扑结构图。
17.图2为定子 a 相绕组匝间短路故障模型。
18.图3为基于可切换滑模观测器的定子匝间短路故障检测流程图。
具体实施方式
19.下面结合附图对本发明作进一步描述。以下实施例仅用于更加清楚地说明本发明的技术方案,而不能以此来限制本发明的保护范围。
20.由于相关故障特征提取较难,数据集的建立不易,故大多只用来其他故障的识别,而对定子匝间短路故障检测应用较少。并且,传统观测器无法解决风速骤变以及含干扰状态下的状态跟踪和定子匝间短路故障的检测问题。因此构造了风力发电机定子匝间短路故障在同步旋转坐标系下的数学模型。在此基础上,给出其正常状态的状态空间模型,并设计一种可切换滑模观测器的双馈电机匝间短路故障检测方法。该方法可以在复杂工况下准确实时跟踪风力发电机内部电流状态并判别系统是否发生定子匝间绕组短路故障。
21.如图1至图3所示,本发明的一种可切换滑模观测器的双馈电机匝间短路故障检测方法,包括以下步骤。
[0022] 步骤一,建立基于多回路模型的双馈感应发电机定子匝间短路故障回路的电压和磁链方程,引入故障位置参数矩阵f
x
,获得自然坐标系下可表示定子绕组任意相的单相匝间短路故障的dfig(doubly-fed induction generator,双馈异步风力发电机)电压方程和磁链方程。
[0023]
所述可表示发生在任意相的单相绕组匝间短路故障的位置参数矩阵f
x
,其具体形式如下。
[0024]
,,。
[0025]
定子匝间a相绕组发生匝间短路后多出的匝间回路电压方程为。
[0026]
。
[0027]
式中,代表对时间t求导的微分算子;为正常状况下定子单相绕组电阻; 为短路匝过渡电阻; 为短路匝过渡电流; 代表故障损毁程度,即绕组内部短路故障匝数与正常匝数的比值; 为故障回路磁链。
[0028]
步骤二,将自然坐标系下的三相电压分量、三相电流分量和三相静止坐标系下的位置参数矩阵,运用clarke和park变换理论换算得到dq0旋转坐标下的电压方程和磁链方程和故障位置参数矩阵fa、fb、fc,以此建立dfig发生定子匝间短路故障时的动态数学模型。
[0029]
所述dq0旋转坐标系下的故障位置参数矩阵为。
[0030]
。
[0031]
。
[0032]
。
[0033]
所述旋转坐标系下的电压方程和磁链方程为。
[0034]
。
[0035]
。
[0036]
。
[0037]
,,。
[0038]
,,。
[0039]
,,。
[0040]
所述电磁转矩方程为。
[0041]
。
[0042]
式中,为定子电压矩阵;为转子电压矩阵;为定子电流矩阵;转子电流矩阵;为定子磁链矩阵;为转子磁链矩阵;为定转子的自感,为定子相绕组漏感;为转子相绕组漏感;为定转子之间的互感;为电机磁极对数;代表对时间t求导的微分算子;为定子的转速;为转子的转速;代表故障损毁程度,即绕组内部短路故障匝数与正常匝数的比值;代表发生在任意相的单相绕组匝间短路故障;为短路匝过渡电流;为故障回路磁链。
[0043]
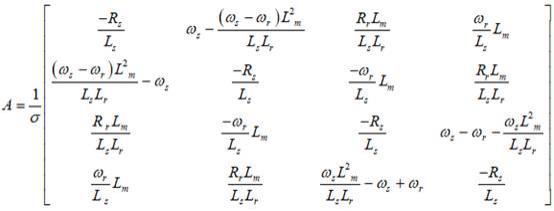
步骤三,基于步骤二所构造的动态数学模型,建立dq0旋转坐标下dfig的状态空间模型。其中,不考虑模型中的零序分量以及故障分量,选取电流的dq轴分量为状态空间变量,电压的dq轴分量为状态空间输入向量。
[0044]
所述dfig的状态空间模型为。
[0045]
。
[0046]
其中,,,。
[0047]
。
。
[0048]
式中,x为状态变量;u为输入变量;c为单位矩阵;矩阵为不确定性干扰的分布矩阵;为系统内部有界不确定性干扰项;为定转子的自感;为定转子之间的互感;为定子的转速;为转子的转速;为定转子的电阻。
[0049]
步骤四,依据dq0旋转坐标系下定转子电流为状态变量的状态方程构造一种滑模观测器。在此基础上,加入一种可切换滑模控制律,其中存在两种类别的切换项。此时,系统通过电流观测器获取dq0旋转坐标下的电流观测值和转子转速观测值。
[0050]
所述dfig可切换滑模观测器形式如下。
[0051]
。
[0052]
所述可切换滑模控制律,其具体形式为。
[0053]
,,。
[0054]
。
。
[0055]
式中,l为反馈矩阵;;为滑模面,,,皆为正参数,且满足,;表示观测值与实际测量值误差的范数;矩阵为不确定性干扰的分布矩阵;w为预设的系统可接受最大观测误差值;为电流观测残差;c为单位矩阵;y为电流实际值;为电流观测值;该可切换滑模控制律中存在两种类别的切换项,以输出偏差为驱动的切换项,以系统运行时间为驱动的切换项;为符号函数;为定转子的自感;为定转子之间的互感;为定子的转速;为转子的转速;为定转子的电阻。
[0056]
步骤五,将转子转速观测值代入状态空间方程获得电流观测值以此构成无速度传感器的情况。再将dq0旋转坐标下的系统电流实际值与电流观测值作差,获得系统电流观测残差。
[0057]
所述输出残差矩阵为。
[0058]
。
[0059]
。
[0060]
式中,为转子电流观测残差;为转子电流实际值;为转子电流观测值;为残差评价指标;表示观测值与实际测量值误差的范数。
[0061]
步骤六,基于本发明的dfig定子匝间短路故障模型,通过步骤五中的电流观测残差的方法实现定子匝间短路故障的检测。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1