用于运行微机械惯性传感器的方法和微机械惯性传感器与流程
1.本发明涉及一种用于运行微机械惯性传感器的方法。此外,本发明还涉及一种微机械惯性传感器。
背景技术:
2.公开文献us 2018 113147 a1公开了一种用于运行微机械惯性传感器的方法和一种微机械惯性传感器。
技术实现要素:
3.本发明的任务在于,给出一种改进的用于运行微机械惯性传感器的方法和一种优化的微机械惯性传感器。
4.这个任务通过本发明的主题来解决。本发明的其他有利的构型在优选实施方式中给出。
5.本发明能够结合智能手机和平板电脑用于如下应用:
6.屏幕定向;显著运动(significant motion);仪器定向;活动性识别、手势识别和情景识别(kontexterkennung);图像稳定;内部区域中的slam(同时进行的定位和地图创建,slam:simultaneous localization and map building);冲击识别和自由掉落识别;运动控制。
7.本发明能够结合可穿戴设备、可听设备、ar和vr用于如下应用:
8.信息的显示;计步;活动性识别、手势识别和情景识别;卡路里计算;入耳识别;睡眠监控;老年人护理;室内导航;位置跟踪;低功耗传感机构、实时运动识别、头部运动跟踪;精确的传感器数据融合。
9.本发明能够结合无人机、游戏和玩具用于如下应用:
10.取向;万向节式悬挂装置;高度稳定(altidude stabilization);飞行控制;运动跟踪、运动控制、平衡;活动性识别和手势识别。
11.本发明能够结合机器人用于如下应用:
12.导航;边界探测;动态路径规划;室内的/内部区域中的slam;空气质量监控;堵塞识别。
13.本发明能够结合智能家居用于如下应用:导航;边界探测;动态路径规划;室内slam/内部区域slam;空气质量监控;堵塞识别:入侵控制;空气质量监控;霉菌识别;温湿调节;地板水平识别;室内导航。
14.本发明还能够在工业化环境中用于如下应用:
15.水位检测;资产跟踪(asset tracking);导航和控制;运动跟踪和位置跟踪;能源管理;预防性维护。
16.提出一种用于运行微机械惯性传感器的方法以及一种微机械惯性传感器。微机械惯性传感器能够借助mems技术制造(mems:micro-electro-mechanical-systems,微电子机
械系统),并且能够具有至少一个弹动地受支承的质量体以及至少一个柔性的止挡结构和至少一个固定结构。另外,微机械惯性传感器包括微机械结构元件和分析处理单元,该分析处理单元具有分析处理电子机构。微机械惯性传感器优选构造为微机械加速度传感器,从而使得微机械结构元件构造为加速度元件。替代地,微机械结构元件还能够构造为转速元件,从而使得惯性传感器形成转速传感器。固定结构包括固定的电极,并且止挡结构紧固在固定结构上。止挡结构包括作用元件和电极。在质量体从初始位置偏移出时,质量体贴靠到作用元件上。通过将电压施加到固定的电极上,在固定的电极与止挡结构的电极之间作用有静电力,以便使带有作用元件的止挡结构向固定的电极的方向且远离质量体地运动。
17.微机械惯性传感器优选构造为mems传感器并且尤其构造为加速度传感器,并且能够由半导体材料、尤其是由经掺杂的硅制成。在此,质量体、弹动的支承装置、止挡结构、固定结构以及固定的电极和止挡结构的电极能够由经掺杂的硅制成。能够考虑的是,加速度传感器的各个区域(例如导体电路或者构造有电极的区域)的掺杂比其他区域的掺杂高。此外,电极能够以铝层或者可类比的金属层或者说导电区的形式构造。加速度传感器能够包括所提到的微机械部件以及具有分析处理电子机构的分析处理单元,该分析处理电子机构优选构造为分析处理电路(asic:专用集成电路)。尤其是,质量体以及固定的电极能够以梳状结构或者简单的板的形式构造,其中,梳状结构和/或板能够形成电容器。
18.在质量体从初始位置偏移出时,质量体能够贴靠到止挡结构的作用元件上。在此,该接触能够导致所谓的“粘接”或者说“粘附”。“粘接/附着”应理解为,这些结构在机械接触之后不再彼此分离,因为在这些结构的界面上产生附着力/粘附力,该附着力/粘附力大于质量体的被偏移的弹簧的或者说弹动的支承装置的复位力。粘接效应是原子层上的过程,该过程由原子或者分子之间的化学键合或者说范德华力造成。
19.通过将电压施加到固定的电极上,能够有利地产生静电力,该静电力能够克服粘附力,其方式是,该静电力导致具有作用元件的止挡结构向固定的电极的方向且远离质量体地运动,其中,质量体由于从初始位置偏移出和由此产生的来自于弹动的支承装置的复位力而又向初始位置的方向返回运动。在此充分利用如下情况:除了接触力、即上文提到的在两个表面接触时起作用的粘附力之外,在微机械加速度传感器中在相互靠近的半导体表面之间、尤其是在电极之间还出现远程的力。这些远程的力在止挡结构的电极的半导体材料的表面电荷和固定的电极的半导体材料的表面电荷之间引起静电相互作用、即根据库仑定律的静电吸引力。
20.借助所提出的具有作用元件的止挡结构,尤其不需要使用高电压来施加必需的静电力。在此,几伏特范围中的所施加的电压(例如3.5v)就足够了。尤其是,固定的电极与止挡结构的电极之间的电位能够相应于传感器的探测电极之间的平均接地电位。平均接地电位能够是0v,但是优选具有上文提到的3.5v的值。探测电极能够构造为固定的电极和/或能够安装在质量体上。
21.在当前情况下在固定的电极与止挡结构的电极之间作用的静电力f能够通过用于作用到板式电容器的板上的静电力的公式来表达:
22.f=0.5ε0dc/dxu2=0.5ε0a/x2u223.其中,dc/dx是电极间距变化时的电容变化,a是电极的或者说电容器板的面积,u是电压,x是电极的或者说板的间距,并且ε0是真空中的电场常数。
24.在此,所提出的止挡结构能够特别有利地减小间距x(与已知的加速度传感器相比,在所述已知的加速度传感器的情况下,x能够相应于探测电极之间的间距并且能够处在大约1至3μm的数量级中)。由于静电力与1除以电极间距的平方成比例,因此例如在所提出的加速度传感器的情况下在止挡结构的电极与固定的电极之间的小的间距x(例如在100nm的数量级中)能够有助于增大该力。此外,静电力不作用在能够运动的传感器质量(即弹动地受支承的质量体)上,而是作用在柔性的止挡结构上。
25.在另一种实施方式中,质量体以这样的方式能够运动地受支承:使得由于质量体从初始位置偏移出,复位力以使质量体向初始位置的方向返回的方式作用到质量体上。在质量体向初始位置的方向返回运动之后,将电压施加到固定的电极上,该电压引起固定的电极与止挡结构的电极之间的静电力,以便使具有作用元件的止挡结构向固定的电极的方向且远离质量体地运动。
26.尤其是,固定的电极与止挡结构的电极之间的电位能够相应于传感器的探测电极之间的平均接地电位,优选地例如是3.5v。在以能够运动的方式受支承的质量体偏移时产生力。如果质量体例如作为感振质量体(seismischer)紧固在弹动的悬挂装置上,则通过所述偏移在弹动的悬挂装置中产生复位力。该复位力逆着从初始位置偏移出的方向作用,并且结合对止挡结构的电极与固定的电极之间的静电力的充分利用能够有助于将止挡结构的作用元件与以能够运动的方式受支承的质量体之间的粘附面分离。因此,对于所提出的加速度传感器,能够防止或者说减少由于粘附/粘接造成的失效,并且由此能够节省成本。
27.在另一种实施方式中,检查质量体在向初始位置的方向返回运动时是否贴靠到作用元件上,并且其中,在检查结果是肯定(即质量体贴靠到作用元件上)的情况下,将电压施加到固定的电极上,该电压引起固定的电极与止挡结构的电极之间的静电力,以便使具有作用元件的止挡结构向固定的电极的方向且远离质量体地运动。有利地,如果在止挡结构的作用元件与质量体之间出现呈粘附形式的接触,则恰好随后将电压施加到固定的电极上。质量体本身从初始位置的偏移由外部加速度产生,并且在没有所施加的电压的情况下进行。质量体的由于弹动的支承装置的复位力而向初始位置的方向返回的运动也在没有所施加的电压的情况下进行。尤其是,固定的电极与止挡结构的电极之间的电位能够相应于传感器的探测电极之间的平均接地电位,优选地例如是3.5v。
28.在另一种实施方式中,优选构造为加速度传感器的惯性传感器包括固定止挡,该固定止挡用于对质量体从初始位置的最大偏移进行限制。质量体具有探测电极。在质量体贴靠到作用元件上的情况下,将电压施加到探测电极和固定的电极上。通过将电压施加到探测电极和固定的电极上,在探测电极与固定的电极之间作用有静电力,以便使具有探测电极的质量体又向固定止挡的方向运动并且增大复位力,该复位力克服粘附力并且该复位力使质量体运动回到初始位置。
29.在此,对于上文提到的实施例(在所述实施例中已描述了将电压施加到固定的电极上),也能够将电压施加到质量体的探测电极和固定的电极上。如果质量体的弹动的悬挂装置的复位力不足以使质量体运动回到初始位置,则通过在探测电极与固定的电极之间施加电压能够在所提到的电极之间建立电场。该电场产生静电吸引力,从而使得质量体向固定止挡的方向运动。该固定止挡优选具有小的面或者说弯曲的面,以便使存在的粘接面最
小化。尤其是,通过充分利用止挡结构的电极与固定的电极之间的静电吸引力,能够克服作用元件与弹动的质量体的接触、即克服粘附力。
30.在此,通过将作用元件与质量体之间的接触分离,在固定止挡上产生的粘附力能够利用粘附系数来减小,也就是说,在固定止挡上产生的粘附力与粘附系数的平方成正比,其中,粘附系数在未被平方的情况下能够具有小于0.5的值。由于质量体的弹动的支承装置的复位力,该接触能够相应地被分离。
31.在另一种实施方式中,止挡结构以杠杆的形式构造,该杠杆具有第一端部和第二端部。该杠杆沿着质量体的面向止挡结构的面定向。杠杆的第一端部构造为悬置的(freistehend),并且包括作用元件。杠杆的第二端部与杠杆悬挂装置的一端部连接,该杠杆悬挂装置借助另外的端部紧固在固定结构上。杠杆以能够运动的方式支承在杠杆悬挂装置上。止挡结构能够灵活地适配于相应的系统要求,并且能够在作为杠杆的构型中成本有利地且紧凑地制造,并且能够稳健地被使用。
32.在另一种实施方式中,杠杆的第一端部和第二端部分别构造为悬置的。杠杆的第一端部具有作用元件。杠杆在第一端部与第二端部之间以能够运动的方式支承在杠杆悬挂装置上,该杠杆悬挂装置以基本上垂直于质量体的面向止挡结构的面的方式定向并且借助一端部与杠杆连接。杠杆悬挂装置借助另外的端部紧固在固定结构上。止挡结构能够灵活地适配于相应的系统要求,并且能够在作为杠杆的构型中成本有利地且紧凑地制造,并且能够稳健地被使用。
33.在另一种实施方式中,杠杆的第一端部和第二端部分别构造为悬置的。杠杆的第一端部具有第一作用元件,并且杠杆的第二端部具有第二作用元件。杠杆在第一端部与第二端部之间以能够运动的方式支承在杠杆悬挂装置上,该杠杆悬挂装置以基本上垂直于质量体的面向止挡结构的面的方式定向并且借助一端部与杠杆连接。杠杆悬挂装置借助另外的端部紧固在固定结构上。将电压施加到固定的电极上,并且通过施加电压,静电力作用到杠杆的具有第一作用元件的第一端部上,以便使杠杆的第一作用元件向固定的电极的方向且远离质量体地运动。杠杆的具有第二作用元件的第二端部通过杠杆的第一端部的运动而贴靠到质量体上。使质量体向初始位置的方向返回运动的力通过第二作用元件作用到质量体上。电压尤其能够被施加到质量体的探测电极上和固定的电极上。
34.止挡结构能够灵活地适配于相应的系统要求,并且尤其能够具有两个作用元件。优选地,弹动的止挡结构构造为杠杆,该杠杆具有悬置的第一端部与第二端部,所述端部分别包括作用元件。由于质量体由于外部加速度从初始位置偏移出,第一作用元件能够首先与质量体接触。由于静电吸引力,杠杆的第一端部上的第一作用元件能够由于运动向固定的电极和杠杆的第二端部的方向与质量体接触,以便将例如呈挤压力的形式的力施加到质量体上,该力在质量体的复位力的方向上起作用。复位力能够将该接触分离并且能够使质量体运动回到初始位置。这种构型提供传感器针对重复的过载加速度而言的稳健构型的优点,所述重复的过载加速度例如在车辆中的事故状况中出现或者在物体掉落时出现,该物体例如是具有集成式加速度传感器的智能手机。由于重复的过载加速度造成的表面退化有利地被限制于止挡结构的第一作用元件和固定止挡。该表面退化通常不出现在止挡结构的第二作用元件上。
35.在另一种实施方式中,止挡结构的电极沿着该止挡结构的面向固定的电极的面构
造。如果止挡结构的电极和固定的电极具有重叠部,即如果该止挡结构的电极和该固定的电极分别朝向彼此地取向,则能够有利地改进所述电极的表面电荷之间的静电相互作用。在此,所述重叠部构造得越大,该相互作用则能够越高。如果止挡结构的电极例如构造在杠杆的悬置的第一端部上,即例如构造在面向固定的电极的下侧上,则例如能够在所提到的电极的表面电荷之间引起尽可能好的静电相互作用。
36.在另一种实施方式中,作用元件包括弯曲的表面,以便在与质量体接触的情况下设计用于沿着该弯曲的表面执行相对于质量体的侧向运动。如果作用元件具有弯曲的表面,则由于作用元件的弯曲的表面的曲率半径而有利地减小作用元件与质量体之间的潜在的粘接面。因此,粘附力没有如在平坦的接触面的情况下那样大。此外,借助这种构型,即使在与质量体重复接触的情况下也能够实现对接触面或者说接触点的更小磨损,因为通过柔和的方式沿着弯曲的表面相对于质量体进行侧向运动,其方式是,该侧向运动相应于一种翻滚运动(abrollbewegung)或者说滚动运动。此外,在此该表面也不是强制性地必须是均匀弯曲的。此外,第一作用元件和第二作用元件都能够分别具有弯曲的表面。
37.在另一种实施方式中,质量体构造为感振质量。质量体通过弹簧元件以能够运动的方式支承在固定结构上。弹簧元件能够通过质量体从初始位置的偏移以有利的方式产生复位力,该复位力使质量体又运动回到初始位置。弹簧元件能够构造为一个机械弹簧或者说能够构造为多个机械弹簧或者说能够由等效的弹性材料构成,该弹性材料同样在偏移的情况下起复位作用。
38.在另一种实施方式中,质量体构造为翘板结构并且包括探测电极。加速度传感器具有锚固结构,该锚固结构在第一端部上包括弹簧元件。该锚固结构借助第二端部紧固在固定结构上。质量体借助锚固结构的弹簧元件弹动地受支承。加速度传感器能够以横向加速度传感器(平面内传感器,in plane sensor)以及以z形传感器(平面外传感器,out of plane sensor)的形式实现。在此,质量体能够灵活地实现为感振质量体或者以用于例如z形翘板传感器的翘板结构的形式实现,其具有在z方向上的偏移。如果质量体构造为翘板结构,则本发明的在上文中有利地陈述的原理同样能够应用于此。尤其是,翘板结构的质量体以及止挡结构能够分别以功能层的形式构造。
39.在另一种实施方式中,尤其构造为加速度传感器的惯性传感器具有固定止挡,该固定止挡用于对质量体从初始位置的最大偏移进行限制。通过这种方式,质量体有利地在导致质量体从初始位置偏移出的外部加速度的情况下保持不附着在固定的电极上并且因此不导致短路。
40.在另一种实施方式中,质量体具有凹槽,以便将止挡结构至少部分地容纳到凹槽中。尤其是,该凹槽能够设计用于在止挡结构偏移的情况下将止挡结构的杠杆的悬置的第二端部至少部分地容纳到该凹槽中。由此,能够有利地紧凑地实施该传感器。
41.在另一种实施方式中,止挡结构以杠杆的形式构造,该杠杆包括第一端部和第二端部。杠杆的第一端部具有第一作用元件,并且杠杆的第二端部具有第二作用元件。凹槽和止挡结构设计用于在止挡结构的第一作用元件由于所述静电力向固定的电极的方向运动时贴靠到止挡结构的第二作用元件上。借助该凹槽,还能够有针对性地实现接触,以便将能够在复位力的方向上起作用的力、例如挤压力施加到质量体上。
42.上述实施方式能够有利地通过将直流电压或者交流电压施加到电极上来实现。优
选地,选择具有频率f的交流电压,该频率是(treffen)振动系统的共振频率,即例如恰好是由止挡结构和弹动的质量体组成的系统的共振频率或者说止挡结构的共振频率。所述振动能够在粘附的情况下局部地分解系统的范德华力。
43.本发明的在上文中阐述的和/或在优选实施方式中再现的、有利的构造方案和/或扩展方案能够——除了例如在明确的相关性或者不相符的替代方案的情况下之外——单独地或者以任意组合的方式应用。
附图说明
44.结合下文对实施例的描述更清楚且更明确地理解本发明的上述性能、特征和优点,以及实现这些性能、特征和优点的方式,结合示意附图更详细地阐述所述实施例。附图示出:
45.图1示出根据第一实施方式的用于运行微机械加速度传感器的方法的示意图;
46.图2示出根据第二实施方式的用于运行微机械加速度传感器的方法的示意图;
47.图3示出根据第三实施方式的用于运行微机械加速度传感器的方法的示意图;
48.图4示出根据第四实施方式的用于运行微机械加速度传感器的方法的示意图;
49.图5示出根据第五实施方式的用于运行微机械加速度传感器的方法的示意图;
50.图6示出根据第一实施方式的微机械加速度传感器的示意图;
51.图7a至图7c示出根据第二实施方式的微机械加速度传感器的示意图;
52.图8a和图8b示出根据第三实施方式的微机械加速度传感器的示意图;
53.图9a至图9c示出根据第四实施方式的微机械加速度传感器的示意图;
54.图10a至图10c示出根据第五实施方式的微机械加速度传感器的示意图。
具体实施方式
55.应指出的是,这些图仅是示意性的并且不是按比例绘制的。在这个意义上,为了更好地理解,在附图中示出的部件和元件可能是以夸大或缩小的方式示出的。还应指出的是,如果涉及相同构造的元件和/或部件,则所选择的在附图中的附图标记不变。
56.应指出的是,配套的附图在下文中一起描述。
57.图1示出根据第一实施方式的用于运行微机械惯性传感器的方法100的示意图。在此,微机械惯性传感器能够构造为加速度传感器,并且例如能够具有在图6中示出的结构。替代地,微机械惯性传感器还能够构造为转速传感器,其中,该构型未在附图中示出。图6中的微机械加速度传感器600具有质量体615。质量体615能够构造为感振质量体或者以翘板结构的形式构造。质量体615通过弹簧元件610弹动地悬挂在加速度传感器600的固定结构605上。弹簧元件610能够例如以机械弹簧的形式构造或者能够包括多个机械弹簧。在本例子中,弹簧元件由半导体材料制成。此外,能够考虑使用具有弹动效果的弹性材料。例如,如图6所示的质量体115能够停留在初始位置,也就是说,质量体115未经偏移,因为没有外部加速度作用到质量体115上。相反,如果外部加速度作用到质量体115上,则该质量体能够在z方向上偏移,如示范性地在图6中借助直角坐标系所示。在坐标轴变化的情况下,该偏移也能够以其他方式实现,并不限于图示。
58.另外,加速度传感器600包括止挡结构620。止挡结构620具有作用元件625和电极
630。止挡结构620的电极630沿着止挡结构620的面向固定的电极635的面构造。固定的电极635紧固在固定结构605上。图6中的止挡结构620以杠杆645的形式构造,该杠杆具有第一端部650和第二端部655。杠杆645沿着质量体615的面向止挡结构620的面640定向。在该示例中,质量体615的面640示范性地在xy平面中延伸。即,杠杆645例如平行于xy平面取向。所提到的结构能够从该平面出发在其外起作用(如在下文中在图10中示出的那样)以及能够在该平面中起作用。如果所述结构在该平面中起作用,则图7a至图7c、图8a和图8b和图9a至图9c能够解释为俯视图,而非剖视图。
59.杠杆645的第一端部650构造为悬置的,并且包括作用元件625。即,作用元件625设置在杠杆645的第一端部650上,以便在质量体615偏移并且质量体贴靠到止挡结构620上时提供与止挡结构620的杠杆645的尽可能小的接触面,该接触面能够通过简单的方式分离。此外,作用元件625确保质量体615不能够与固定的电极635接触,并且该作用元件能够通过这种方式避免短路。在该示例中,该作用元件是杠杆645的自由的、弯成角度的端部。
60.杠杆645的第二端部655与杠杆悬挂装置660的一端部665连接。杠杆悬挂装置660借助另外的端部670紧固在固定结构605上。尤其是,杠杆645以能够运动的方式或者说弹动地支承在杠杆悬挂装置660上。杠杆悬挂装置660以基本上垂直于质量体615的面向止挡结构620的面640的方式定向。在该示例中,杠杆悬挂装置660平行于z轴取向。
61.用于运行微机械加速度传感器600的方法100设置:在第一方法步骤105中使微机械加速度传感器600的质量体615从其输出位置沿着偏移方向675偏移。这通过作用到质量体615上的外部加速度来实现。在示出的实施例中,偏移方向675平行于z轴延伸。在质量体615的在坐标系中的其他取向的情况下,该偏移方向也能够以与此不同的方式实现。由于质量体615的偏移,在第二方法步骤110中,质量体615贴靠到止挡结构620的作用元件625上。虽然这在图6中未示出,但是在下文中在图7b中示出。
62.在第三方法步骤115中,通过将电压施加到固定的电极635上,在固定的电极635与止挡结构620的电极630之间引起静电力,以便使具有作用元件625的止挡结构620向固定的电极635的方向且远离质量体615地运动。在此,电压的施加能够通过在附图中未示出的、具有分析处理电子机构的分析处理单元来实现。
63.此外,质量体615能够具有探测电极,从而使得也能够将电压施加到该探测电极和固定的电极635上,以便根据所施加的电压使质量体向固定的电极的方向运动或者远离该固定的电极地运动。这在图6中同样未示出。
64.根据图2中的第二实施方式的用于运行微机械加速度传感器600的方法200,在第一方法步骤205中,使质量体615从其初始位置偏移。该偏移能够沿着在图6中示出的与z轴平行的偏移方向675通过作用到质量体615上的外部加速度来实现。因此,图2中的第一方法步骤205能够相应于图1中的第一方法步骤105。然而,这未在图6中示出。由于质量体615弹动地支承在弹簧元件610上,因此弹簧元件610从初始位置(在该初始位置,没有加速度作用到质量体615上)中的偏移产生弹簧元件610中的复位力,以便使带有质量体615的弹簧元件610又运动回到初始位置。因此在第二方法步骤210中,由于质量体615从初始位置偏移出,复位力起作用,该复位力使质量体615远离作用元件625地向初始位置的方向返回运动。
65.在此,在质量体615和弹簧元件610偏移时,质量体615能够贴靠到止挡结构620的作用元件625上。在第三方法步骤215中,在质量体615向初始位置的方向返回运动之后,将
电压施加到固定的电极635上,该电压引起固定的电极635与止挡结构620的电极630之间的静电力,以便使具有作用元件625的止挡结构620向固定的电极635的方向且远离质量体615地运动。第三方法步骤215同样未在图6中示出。此外,如上所述,质量体615能够包括探测电极。如上所述,能够将电压施加到该探测电极和固定的电极635上,该电压使质量体615和止挡结构620的杠杆645的第一端部650由于电场并且由于电极之间的静电吸引力而向固定的电极635的方向运动,以便克服粘附力。例如,探测电极能够以梳子或者说接片或者手指的形式布置在质量体615的上部区域中。
66.在下文中,对图3中的方法300连同在图7a至图7c中示出的微机械加速度传感器700一起进行阐述。在上文中阐述的方法同样能够与在图7a至图7c中示出的加速度传感器700结合,或者说图3中的方法300也能够与图6中的加速度传感器600结合。图7a至图7c示出微机械加速度传感器700,该微机械加速度传感器以与图6中的加速度传感器600相似的方式构造。在此,质量体700在直角坐标系中的取向构造得与图6中的加速度传感器600的取向相同。这是示范性选择的,以便能够对于所有实施例都维持质量体700沿着平行于z轴延伸的偏移方向775的统一偏移,并且以便由此简化描述。如上所述,该实施仍然也能够以其他方式来实现。
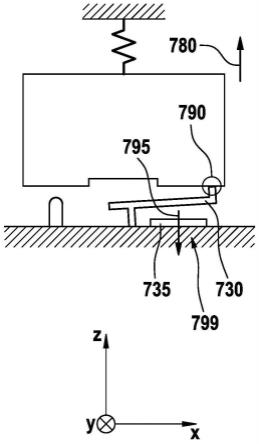
67.图7a至图7c中的加速度传感器700同样包括质量体715、止挡结构720,并且通过弹簧元件710弹动地支承或者说悬挂在固定结构705上。与图6中的加速度传感器600不同,图7a至图7c中的质量体715例如具有凹槽785。凹槽785能够设计用于将止挡结构720至少部分地容纳到凹槽785中,尤其是在止挡结构720由于静电力795而偏移的情况下。然而,图7中的凹槽785以及图8中的凹槽885不是强制必需的。在图7a中示出质量体715的初始位置(没有作用的外部加速度),在图7b中示出质量体715沿着偏移方向775的偏移,并且在图7c中示出如下状况:在该状况中,复位力780通过弹簧元件710作用到质量体715上。
68.止挡结构745以杠杆745的形式构造,该杠杆具有第一端部750和第二端部755。杠杆745的第一端部750和第二端部755分别构造为悬置的。杠杆745的第一端部750具有作用元件725,该作用元件能够贴靠到质量体715上。作用元件725例如构造为弯成角度的、自由的第一端部750。杠杆745在第一端部750与第二端部755之间以能够运动的方式支承在杠杆悬挂装置760上。如果面740在xy平面中延伸,则杠杆悬挂装置760以基本上垂直于质量体715的面向止挡结构720的面740的方式定向,在当前情况下平行于z轴定向。杠杆悬挂装置760借助一端部765与杠杆745连接,并且借助另外的端部770紧固在固定结构705上。此外,图7a至图7c中的加速度传感器700具有固定止挡703,该固定止挡用于对质量体715的偏移进行最大程度的限制。图6中的加速度传感器600也能够包括这样的固定止挡703。例如,固定止挡703具有弯曲表面,以便使接触面最小化。
69.根据图3中的方法300,在第一方法步骤305中,通过加速度的作用借助弹簧元件710使质量体715从初始位置向着偏移方向775的方向偏移。这相应于图7b所示状况以及图1和图2中的相应的方法步骤。在第二方法步骤310中,带有质量体715的弹簧元件710的偏移产生复位力780,以便将质量体715和弹簧元件710又引导回到初始位置。在此,质量体715的偏移能够如加速度作用到质量体715上那样长或者说那样远地进行,并且例如最后通过固定止挡703被停止。质量体715与固定止挡703之间的接触面上的原子相互作用或者分子相互作用能够导致质量体715与固定止挡703之间的粘附力。同样地,这种效应能够出现在质
量体715与止挡结构720的杠杆745的作用元件725之间。
70.理想情况下,通过质量体715和弹簧元件710的偏移而在弹簧元件710中生成的复位力780足以克服质量体715与固定止挡703之间的粘附力,即足以使质量体715在向初始位置的方向运动时与固定止挡703分离。这在图7c中示出。在图3中的第三方法步骤315中,加速度传感器700的具有分析处理电子机构的分析处理单元例如设计用于检查质量体715在向初始位置的方向返回运动时是否贴靠到作用元件720上。也就是说,检查作用元件720是否由于作用元件720的接触面与质量体715的接触面之间的粘附力790而粘附在质量体715上。
71.质量体715和止挡结构720的作用元件725的粘附能够通过分析处理加速度传感器700的测量信号来探测。为此,未示出的分析处理单元与加速度传感器700的微机械结构元件的电触点连接,该分析处理单元包括分析处理电子机构。分析处理单元构造用于,如果加速度传感器700的电输出信号的时间曲线处在饱和区域中,则识别出粘附。替代于此地,分析处理单元能够通过质量体715的电位与止挡结构720之间的电阻测量来识别粘附。
72.所提到的检查借助图3中的分支示出。在检查结果是肯定的情况下(用y标出),在第四方法步骤320中,通过分析处理单元将电压799施加到固定的电极735上。止挡结构720的电极730关于固定的电极735的取向能够以与上文对图6中的加速度传感器600的阐述相似的方式构造。在此省去对传感器的特征的重复,并且参考上文的阐述。在图7c中,作用元件725由于原子粘附力或者说分子粘附力790附着在质量体715上。因此,如上所示,施加电压799。电压799产生电场,该电场引起固定的电极735与止挡结构720的电极730之间的静电力795,以便使具有作用元件725的止挡结构720向固定的电极735的方向且远离质量体715地运动。由于复位力780继续作用到质量体715上,因此,借助止挡结构720的电极730与固定的电极735之间的静电吸引力795能够克服作用元件725的接触面与质量体715的接触面之间的粘附力790,该静电吸引力导致止挡结构720的杠杆745的第一端部750向固定的电极735的方向运动。
73.因此,由此最后不仅能够将止挡结构720的杠杆745而且能够将质量体715引导回到初始位置。在图3中示出的方法300中,第四方法步骤320又回到第三方法步骤315,即对质量体715是否贴靠到作用元件725上进行检查的第三方法步骤。在所描绘的状况中,即在质量体715与作用元件725之间的接触的分离过程中,所述检查得出否定的结果(在分支中用n标出),并且加速度传感器700能够在第五方法步骤325中过渡到正常的测量模式中。例如,分析处理单元在此随着加速度的增加探测到更高的输出信号,而不处在饱和区域中。
74.附加地,在图7a至7c中以及图6中的加速度传感器能够分别包括未示出的探测电极。尤其是,所提到的在图7c或者说图6中的电压799能够分别施加到该探测电极上和固定的电极735上。例如,探测电极能够以梳子或者说接片或者手指的形式布置在质量体715的上部区域中。
75.图8a和图8b中的微机械加速度传感器800能够以与图7a至7c中的微机械加速度传感器700相似的形式构造。因此,各个部件的附图标记的系统适配于图7a至图7c中的系统,其中,在这里省去对部件的详细阐述,取而代之地,参考上文的阐述。与图6和图7a至图7c中的加速度传感器600和700的在先的示意图不同地,图8a和图8b中的加速度传感器800具有探测电极897。该探测电极以简化的方式绘出,并且能够以梳子或者说接片或者手指的形式
构造在质量体815上。尤其是,在质量体815贴靠在作用元件825上的情况下,能够将电压899施加到探测电极897上和固定的电极835上。在此,图8a从一种与图7c中示出的状况相应的状况出发,所述状况即:由于复位力780并且由于基于确定存在粘附而施加电压799,质量体715向初始位置的方向运动。在图7c中的状况中,弹簧元件710的复位力780足以克服质量体715与固定止挡703之间的粘附力790并且足以使质量体715继续向初始位置的方向运动。在图8a中,复位力880例如不足以将加速度传感器800从粘接面分离。
76.在图4中可找到所属的方法400。该方法包括第一方法步骤405至第三方法步骤415,所述第一方法步骤至第三方法步骤以与图3中的方法300相似的方式构造,因此,为了避免重复,参考上文的阐述。在第四方法步骤420中,在加速度传感器800检查出止挡结构820的作用元件825与质量体815相贴靠的情况下,将电压899施加到探测电极897上和固定的电极835上。如上所述,该电压在电极之间产生电场,并且引起质量体815的表面电荷与固定止挡803的表面电荷之间的静电吸引力,从而使得在第五方法步骤425中质量体815又向固定止挡803的方向运动并且由于原子粘附或者说分子粘附而附着在固定止挡803上。由此,同样能够增大弹簧元件810的复位力880,该复位力使质量体815运动到初始位置。
77.此外,质量体815与作用元件825之间的粘附力890能够通过所描述的在探测电极897与固定的电极835之间施加的电压来克服,其方式是,在止挡结构820(该止挡结构同样形成杠杆845并且在杠杆845的第一端部850的区域中具有电极830)的电极830与固定的电极835之间产生电场,该电场引起电极830与固定的电极835之间的静电吸引力895。
78.由于静电吸引力895,杠杆845的具有电极830以及作用元件825的第一端部850向固定的电极835的方向远离质量体815地运动。在图8a和8b中以及在先前的或者下面的图9a至图9c中,该运动分别作为围绕杠杆悬挂装置860的旋转示出。然而,该运动也能够以杠杆845的挠曲的形式表现出来。这也适用于上文阐述的、图6至图8a和图8b的杠杆645、745、845。该运动能够导致,质量体815在作用元件825上的附着被分离并且质量体815仅附着在固定止挡803上,如图8b所示。在此,通过将作用元件820与质量体815之间的接触分离,在固定止挡803上产生的粘附力890能够以粘附系数来减小。也就是说,在固定止挡803上产生的粘附力890随后与粘附系数的平方成正比,其中,该粘附系数在未被平方的情况下例如具有小于0.5的值。由于带有质量体815的弹簧元件810的复位力880,能够相应地将该接触分离,并且质量体815以及止挡结构820能够分别运动回到初始位置。
79.图4中的第五方法步骤425通向第三方法步骤415,即对粘附进行检查的第三方法步骤。在所阐述的例子中,该检查现在得出否定的结果(在分支上用n标出),从而使得在与图3中的第五方法步骤325相似的第六方法步骤430中,加速度传感器800能够返回到正常的测量模式中,如上所述。
80.图9a至图9c示出微机械加速度传感器900的另一实施方式。用于运行传感器900的方法500在图5中示出。与图8a和8b中的加速度传感器800不同,图9a至9c中的加速度传感器900的止挡结构920虽然构造为杠杆945,然而在杠杆945的第一端部950以及第二端部955上分别具有第一作用元件925和第二作用元件927。杠杆945的第一端部950与杠杆945的第二端部955一样也构造为悬置的。杠杆945在第一端部950与第二端部955之间以能够运动的方式支承在杠杆悬挂装置960上。如果质量体915的面940在xy平面中延伸,则杠杆悬挂装置960以基本上垂直于质量体915的面向止挡结构920的面940的方式定向,在当前情况下即平
行于z方向定向。杠杆悬挂装置960借助一端部965与杠杆945连接,并且借助另外的端部970紧固在固定结构905上。尤其是,杠杆945也能够平行于xy平面取向。
81.图9a示出分别在其初始位置的质量体915以及止挡结构920。在图9b中,借助弹簧元件910使质量体915偏移,并且将电压999施加到固定的电极935上。在图9c中,通过弹簧元件910的复位力980使质量体915与第二作用元件927之间的接触分离,并且使质量体915、弹簧元件910以及止挡结构920分别运动回到其初始位置。方法500在第一至第四方法步骤505至520中以与图3中的方法300相似的方式构造,因此,参考上文的关于各个方法步骤的阐述。在此,第一至第四方法步骤505至520相应于图9a和9b。
82.在图5中的第五方法步骤525中并且在图9b中的传感器900的相应的示图中,通过施加电压999,静电力995作用到杠杆945的具有第一作用元件925的第一端部950上,以便使杠杆945的第一作用元件925向固定的电极935的方向且远离质量体915地运动,以便克服第一作用元件925与质量体915之间的粘附力990。与图7a至图7c中相似地,在图9a至图9c中假设,弹簧元件910的复位力980足以克服固定止挡903与质量体915之间的粘附力990并且足以使粘附面又相互分离。否则,与在图4中或者说在图8a和8b中的传感器800的示意图中一样,可能需要附加的方法步骤。
83.由于杠杆945的第一端部950的运动,杠杆945的具有第二作用元件927的第二端部955贴靠到质量体915上。图9c示出这一点。在第六方法步骤530中,第二作用元件927能够由于第二作用元件927的运动并且由于与质量体915的接触而产生作用到质量体915上的力,例如呈挤压力形式的力,该挤压力平行于复位力980的取向定向,以便与复位力980的作用一起使质量体915运动回到初始位置。与在先的方法一样,第六方法步骤530又返回到具有对呈附着的形式的接触进行检查的方法步骤,即返回到第三方法步骤515。在否定的检查结果的情况下,传感器900能够变换到正常的测量运行中,如上所述。尤其是在图9c中示出的状况中,质量体915的凹槽985能够是有利的,以便引起第二作用元件927与质量体915的凹槽985的有针对性的贴靠。
84.图10a至图10c示出加速度传感器1000的另一实施方式。加速度传感器1000包括质量体1015。在示出的实施方式中,质量体1015构造为翘板结构,从而使得加速度传感器1000能够实施为z形翘板传感器或者平面外传感器。图10a示出加速度传感器1000的俯视图,即例如示出该加速度传感器在xy平面中的伸展,图10b和图10c是加速度传感器1000的针对质量体1015的区域的剖视图。图10b示出在其初始位置的质量体1015,而图10c示出沿着平行于z轴延伸的偏移方向1075从初始位置偏移出的质量体1015。图10a中的构造为翘板结构的质量体1015具有第一探测电极1096和第二探测电极1097。此外,加速度传感器1000具有锚固结构1007。锚固结构1007包括第一端部1011,其中,在第一端部1011上紧固有弹簧元件1010。质量体1015通过锚固结构1007的弹簧元件1010弹动地受支承。在加速度传感器1000构造为z形翘板传感器的情况下,弹簧元件1010能够尤其相应于扭转弹簧。锚固结构1007具有第二端部1013,该锚固结构借助该第二端部与固定结构1005紧固在一起。这在图10a中仅示意性示出。
85.在图10a至图10c中,质量体1015此外还具有固定止挡1003。例如与上文阐述的且在附图中示出的固定止挡703、803、903不同,这些固定止挡能够包括粒结形状(noppenform)。此外,在图10a中绘入区域1001,在所述区域中能够分别布置有止挡结构
1020。在此,区域1001在xy平面中例如彼此对置并且对称地取向。此外,能够考虑的是,在加速度传感器1000上构造仅唯一一个这样的区域1001,例如以在附图标记1015的区域中向质量体1015上的单个固定止挡1003的方向伸入的方式构造。在止挡结构1020的区域1001中,质量体1015在图10b和图10c的剖视图中分别具有凹槽1085。尤其是,止挡结构1020能够至少部分地容纳到凹槽1085中。质量体1015具有例如两个粒结形的固定止挡1003。
86.止挡结构1020构造为杠杆1045,其中,杠杆1045包括第一端部1055和第二端部1055,该第一端部构造为悬置的。杠杆1045的第二端部1055与杠杆悬挂装置1060的一端部106连接,其中,杠杆悬挂装置1060能够相应于固定结构1005。尤其是,固定结构1005能够构造为衬底。杠杆1045以能够运动的方式支承在杠杆悬挂装置1060上。面1040平行于xy平面取向,而杠杆悬挂装置1060以基本上垂直于质量体1015的面向止挡结构1020的面1040的方式定向,即如图所示平行于z轴定向。此外,与迄今为止的止挡结构不同,杠杆1045具有粒结形的固定止挡1003。例如,固定止挡1003背离质量体1015,代替分别朝向质量体取向的作用元件。能够考虑,图10中的杠杆1045此外还能够包括作用元件。此外能够考虑,在图6至图9c中示出的作用元件625、725、825、925分别以固定止挡的形式实现,其中,该固定止挡能够构造为粒结形或者能够包括弯曲的表面。尤其是,上述作用元件625、725、825、925能够分别包括弯曲的表面,以便在作用元件625、725、825、925贴靠在质量体615、715、815、915上时执行相对于质量体615、715、815、915的侧向运动并且由此在必要时更容易将相互的附着分离。
87.杠杆1045包括电极1030。该电极优选沿着杠杆1045的面向固定的电极1035的面构造。在该示例中,杠杆1045甚至超过固定的电极1035伸出,以便在质量体1015的过载加速度的情况下例如使杠杆1045的悬置的第一端部1050上的粒结形固定止挡1003不与固定的电极1035接触。固定的电极1035紧固在固定结构1005上,其中,如上所述,固定结构1005能够由衬底材料形成。图10c中的质量体1015沿着偏移方向1075的偏移例如引起固定止挡1003与止挡结构1020的杠杆1045相贴靠,该固定止挡布置在质量体1015的凹槽1085中。此外,质量体1015从初始位置的偏移在弹簧元件1010中产生复位力1080,以便使质量体1015远离止挡结构1020向初始位置的方向返回运动。
88.质量体1015的固定止挡1003在杠杆1045上的贴靠导致部件之间的原子粘附力或者分子粘附力1090。加速度传感器1000能够借助上述方法确定所述贴靠,并且能够在检查结果为肯定的情况下将电压1099施加到固定的电极1035上,以便在止挡结构1020的电极1030与固定的电极1035之间引起静电吸引力1095。吸引力1095引起:杠杆1045的悬置的第一端部1050向固定的电极1035的方向运动,即远离带有固定止挡1003的质量体1015地运动。附加地,弹簧元件1010的复位力1080作用到质量体1015上,从而使得质量体1015远离杠杆1045向初始位置的方向运动。因此,能够克服质量体1015的固定止挡1003与杠杆1045之间的粘附力1090,并且质量体1015、弹簧元件1010以及杠杆1045能够分别返回到其初始位置。
89.上述实施方式能够有利地通过将直流电压或者交流电压施加到电极上来实现。优选地,选择具有频率f的交流电压,该频率是振动系统的共振频率,即例如恰好是止挡结构和质量体组成的系统的共振频率或者说止挡结构的共振频率。
90.对于在上文中描述的在图6至图10c中的实施方式,固定的电极与止挡结构的电极之间的电位能够相应于传感器的探测电极之间的平均接地电位,优选地例如是3.5v。与图
8a和图8b中在探测电极897与固定的电极835之间所施加的电压899相似,图7a至图10c中的电压799、999、1099能够施加在质量体715、915、1015的在所提到的附图中未示出的探测电极与固定的电极735、935、1035之间。
91.本发明已通过优选的实施例详细地描述本发明。替代所描述的实施例地,能够考虑其他实施例,所述其他实施例能够具有所描述的特征的其他变型或者组合。出于这个原因,本发明不限于所公开的例子,因为本领域技术人员能够由此推导出其他变型,而在此不离开本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1