一种植保机用激光雷达系统的制作方法
1.本发明涉及一种植保机用激光雷达系统,属于激光雷达技术领域。
背景技术:
2.植保无人机,又名无人飞行器,顾名思义是用于农林植物保护作业的无人驾驶飞机,该型无人飞机由飞行平台(固定翼、直升机、多轴飞行器)、导航飞控、喷洒机构三部分组成,通过地面遥控或gps飞控,来实现喷洒作业,可以喷洒药剂、种子、粉剂等。
3.现有技术中的植保无人机具有图像实时传输、姿态实时监控功能,在喷洒农药时,需要专业的飞行控制者来操控,由于农田周边环境普遍复杂,无人机植保作业时,高压线、低压线、水塘、瓜架、田埂等是很常见的,高度在1米以上的草、树木、灌木等恶劣的作业环境也经常遇到。飞行控制者在操控植保无人机作业过程中,仅靠目测来控制油门的幅度,这对飞行控制者的技术要求非常高,由于植保无人机不具备360度全向识别障碍物的能力,且测得的障碍距离不精确,在飞行中难以有效识别前方障碍物和下方地表特征,无人机植保作业的安全性还有很大的提升空间,无人机难以有效实现自动绕障。
4.另外大部分植保无人机的植保作业是在白天进行,但白天打药的时间可能是不够的,加上农作物病虫害的防治季节性比较强,所以有些防治需要在傍晚,甚至夜间进行,夜间作业难以保障植保无人机安全性。
5.综上可知,现有技术在实际使用上显然存在不便与缺陷,所以有必要提出一种植保机用激光雷达系统来解决现有技术的瓶颈。
技术实现要素:
6.本发明针对背景技术中的不足,提供一种植保机用激光雷达系统,可以具备360度全向识别障碍物的能力,且测得的障碍距离精确,有效识别障碍物进而实现自动绕障,提升植保机在植保作业的安全性;避免受到光线的影响,允许植保机傍晚甚至夜间作业仍然能保障安全性。
7.为解决以上技术问题,本发明采用以下技术方案:一种植保机用激光雷达系统,包括呈上下对称设置的上雷达组件和下雷达组件,上雷达组件和下雷达组件通过双向伸缩缸实现相向或相背移动,上雷达组件和下雷达组件安装在内筒体的内腔中;所述内筒体的轴线呈竖直设置,内筒体的内腔中部固接有双向伸缩缸,双向伸缩缸设有可双向推进的伸缩杆,伸缩杆的头部分别通过推板与上雷达组件和下雷达组件固定连接;所述内筒体的内壁面上固接有两个上下设置的弹性套,弹性套的内壁面与上雷达组件和下雷达组件的外壁面滑动连接;所述上雷达组件包括连接座,连接座远离推板的端面内设有筒体部,筒体部内部设有台阶孔,台阶孔由上部的台阶孔大径段和下部的台阶孔小径段组成,台阶孔大径段内
嵌设有接收透镜,接收透镜内部设有贯穿孔,贯穿孔内穿设有准直镜筒;所述筒体部的外部依次套设有电机线圈定子和电机转子,电机转子的外部固接有与其同步转动的反射镜。
8.进一步地,上部弹性套的顶端与内筒体的顶端平齐设置,上部弹性套的底端与双向伸缩缸的缸体顶端平齐设置;下部弹性套的底端与内筒体的底端平齐设置,下部弹性套的顶端与双向伸缩缸的缸体底端平齐设置。
9.进一步地,所述连接座上设有呈圆周均布的螺孔,连接座通过螺孔与推板固定连接。
10.进一步地,所述筒体部与连接座同轴设置且一体成型。
11.进一步地,所述准直镜筒的下端部内嵌设有光源发生器,准直镜筒的上端部内嵌设有发射准直镜。
12.进一步地,所述接收透镜固接于台阶孔大径段的底端面上;所述准直镜筒的下端固接于台阶孔小径段内。
13.进一步地,所述电机线圈定子和电机转子均为环状结构,电机线圈定子、电机转子和筒体部的顶端平齐设置。
14.进一步地,所述反射镜呈倾斜45
°
设置,反射镜的外部设有罩体,罩体底部设有开口端,罩体的开口端内设有轴肩,罩体通过轴肩与连接座固定连接;罩体和连接座的下端面平齐设置;所述罩体与连接座之间形成密闭的腔室。
15.进一步地,所述内筒体的外部依次套设有中筒体和外筒体;所述外筒体底部的左右两侧固接有起落架,外筒体的周围设有多个旋翼。
16.进一步地,所述内筒体与中筒体之间的夹腔内安装有多个呈圆周均布的蓄电池,中筒体与外筒体之间的夹腔内安装有多个呈圆周均布的储液箱。
17.本发明采用以上技术方案后,与现有技术相比,具有以下优点:本发明中的上雷达组件和下雷达组件通过双向伸缩缸实现相向或相背移动,通过对雷达组件的伸缩隐藏式设计,避免在非植保工作过程中对雷达组件造成损伤,避免在植保工作过程中因植保机本身的结构影响对雷达360度的扫描;本发明通过设置两线扫描光路,两线光路可同步扫描,互不干扰,可对水平全向障碍物进行有效识别,且测得的障碍距离精确,进而使植保机实现自动绕障及仿地飞行功能,充分保障植保作业安全,实现真正的360度安全防护;本发明中的弹性套与雷达组件相配合,弹性套对雷达组件起到减震保护功能,雷达组件在伸缩过程中与弹性套滑动连接,通过弹性套将雷达组件表面粘附的污物摩擦去除,确保雷达组件表面的清洁度,避免因污物影响雷达的扫描,影响扫描过程的可靠性和准确性;本发明中的激光雷达系统是不会受到光线的影响,允许傍晚甚至夜间作业仍然能保障安全性,使飞行安全更进一步,实现真正的360度安全防护;本发明解决了绕不开的障碍物、测不准的障碍距离等等问题,极大提升了无人机植保作业的安全性与高效性。
18.下面结合附图和实施例对本发明进行详细说明。
附图说明
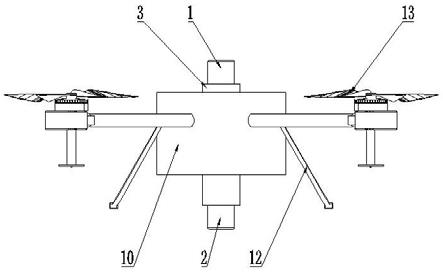
19.图1是上雷达组件和下雷达组件安装位置的示意图;图2是图1的俯视图;图3是上雷达组件和下雷达组件的伸缩驱动示意图;图4是图3中m处的结构放大图;图5是连接座的结构示意图。
20.图中,1-上雷达组件,101-连接座,102-筒体部,103-台阶孔大径段,104-台阶孔小径段,105-螺孔,106-接收透镜,107-准直镜筒,108-光源发生器,109-发射准直镜,1010-电机线圈定子,1011-电机转子,1012-反射镜,1013-罩体;2-下雷达组件,3-内筒体,4-双向伸缩缸,5-伸缩杆,6-推板,7-弹性套,8-中筒体,9-蓄电池,10-外筒体,11-储液箱,12-起落架,13-旋翼。
具体实施方式
21.为了对本发明的技术特征、目的和效果有更加清楚的理解,现对照附图说明本发明的具体实施方式。
22.如图1-图5共同所示,本发明提供一种植保机用激光雷达系统,包括呈上下对称设置的上雷达组件1和下雷达组件2,上雷达组件1和下雷达组件2通过双向伸缩缸4实现相向或相背移动;所述上雷达组件1和下雷达组件2安装在内筒体3的内腔中,在植保工作过程中,上雷达组件1和下雷达组件2从内筒体3内腔中伸出,在非植保工作过程中,上雷达组件1和下雷达组件2缩至内筒体3内腔中。
23.所述内筒体3的轴线呈竖直设置,内筒体3的内腔中部固接有双向伸缩缸4,双向伸缩缸4设有可双向推进的伸缩杆5;所述伸缩杆5的头部分别通过推板6与上雷达组件1和下雷达组件2固定连接。
24.所述内筒体3的内壁面上固接有两个上下设置的弹性套7,弹性套7的内壁面与上雷达组件1和下雷达组件2的外壁面滑动连接。
25.上部弹性套7的顶端与内筒体3的顶端平齐设置,上部弹性套7的底端与双向伸缩缸4的缸体顶端平齐设置;下部弹性套7的底端与内筒体3的底端平齐设置,下部弹性套7的顶端与双向伸缩缸4的缸体底端平齐设置;所述弹性套7具有减震和清洁功能,弹性套7具备一定的弹性,对上雷达组件1和下雷达组件2起到减震保护功能,上雷达组件1和下雷达组件2在伸缩过程中与弹性套7滑动连接,通过弹性套7将上雷达组件1和下雷达组件2表面粘附的污物摩擦去除,保持上雷达组件1和下雷达组件2表面的清洁。
26.所述上雷达组件1包括连接座101,连接座101上设有呈圆周均布的螺孔105,连接座101通过螺孔105与推板6固定连接。
27.所述连接座101远离推板6的端面内设有筒体部102,筒体部102与连接座101同轴设置且一体成型。
28.所述筒体部102内部设有台阶孔,台阶孔由上部的台阶孔大径段103和下部的台阶孔小径段104组成;所述台阶孔大径段103内嵌设有接收透镜106,接收透镜106固接于台阶孔大径段103的底端面上。
29.所述接收透镜106内部设有贯穿孔,贯穿孔内穿设有准直镜筒107,准直镜筒107的
下端固接于台阶孔小径段104内;所述准直镜筒107的下端部内嵌设有光源发生器108,准直镜筒107的上端部内嵌设有发射准直镜109。
30.所述筒体部102的外部依次套设有电机线圈定子1010和电机转子1011,电机线圈定子1010和电机转子1011均为环状结构,电机线圈定子1010、电机转子1011和筒体部102的顶端平齐设置;所述电机转子1011的外部固接有与其同步转动的反射镜1012,反射镜1012呈倾斜45
°
设置,反射镜1012设置在发射准直镜109上方。
31.电机线圈定子1010通稳定电流,其产生磁场力驱动电机转子1011旋转,电机转子1011带动反射镜1012旋转,实现雷达的360
°
全角度扫描。
32.所述反射镜1012的外部设有罩体1013,罩体1013底部设有开口端,罩体1013的开口端内设有轴肩,罩体1013通过轴肩与连接座101固定连接;罩体1013和连接座101的下端面平齐设置;所述罩体1013与连接座101之间设有密闭的腔室,反射镜1012位于密闭腔室内。
33.所述内筒体3的外部依次套设有中筒体8和外筒体10,内筒体3与中筒体8之间的夹腔内安装有多个呈圆周均布的蓄电池9,中筒体8与外筒体10之间的夹腔内安装有多个呈圆周均布的储液箱11;所述外筒体10底部的左右两侧固接有起落架12,外筒体10的周围设有多个旋翼13。
34.在植保工作过程中,上雷达组件1和下雷达组件2从内筒体3内腔中伸出,上雷达组件1伸出后的高度高于旋翼13所处的高度,下雷达组件2伸出后的高度低于起落架12所处的高度,防止因旋翼13和起落架12的存在而造成雷达的扫描盲区,避免影响雷达的360
°
全角度扫描。
35.本发明的具体工作原理:本发明中的上雷达组件1和下雷达组件2通过双向伸缩缸4实现相向或相背移动,在植保工作过程中,上雷达组件1和下雷达组件2从内筒体3内腔中伸出,进行360
°
全角度扫描;在非植保工作过程中,上雷达组件1和下雷达组件2缩至内筒体3内腔中,通过对雷达组件的伸缩隐藏式设计,避免在非植保工作过程中对雷达组件造成损伤,避免在植保工作过程中因植保机本身的结构影响对雷达360度的扫描。
36.本发明中的上雷达组件1和下雷达组件2的工作原理相同,上雷达组件1内的发射准直镜109、反射镜1012和接收透镜106构成第一线的扫描光路,下雷达组件2内的发射准直镜109、反射镜1012和接收透镜106构成第二线的扫描光路;两线光路可同步扫描,互不干扰,可对水平全向障碍物进行有效识别,且测得的障碍距离精确,进而使植保机实现自动绕障及仿地飞行功能,充分保障植保作业安全,实现真正的360度安全防护。
37.本发明中的弹性套7与上雷达组件1和下雷达组件2相配合,弹性套7具备一定的弹性,对上雷达组件1和下雷达组件2起到减震保护功能,上雷达组件1和下雷达组件2在伸缩过程中与弹性套7滑动连接,通过弹性套7将上雷达组件1和下雷达组件2表面粘附的污物摩擦去除,保持上雷达组件1和下雷达组件2表面的清洁度。
38.以上所述为本发明最佳实施方式的举例,其中未详细述及的部分均为本领域普通技术人员的公知常识。本发明的保护范围以权利要求的内容为准,任何基于本发明的技术启示而进行的等效变换,也在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1