一种底盘螺栓位置检测方法及检测装置与流程
1.本发明涉及检测技术领域,尤其涉及一种底盘螺栓位置检测方法及检测装置。
背景技术:
2.空调外机底盘在生产过程中由于模具的影响、生产机器的震动以及人为操作失误等因素,容易导致外机底盘的螺栓孔位置偏移。螺栓孔的位置偏移导致安装在螺栓孔的螺栓位置偏移,影响后续空调部件的装配。因此需要对在出厂前需要对空调外机底盘进行检测,但是当前外机底盘的成品检测是人工采用辅助测量工装逐个进行筛查。这种检测方式工作效率低、人力成本高,而且在长时间的工作过程中,检测人员容易疲劳,这容易导致误判,最终导致检测结果不能满足生产要求。
技术实现要素:
3.为克服相关技术中存在的问题,本发明的目的之一是提供一种底盘螺栓位置检测方法,该方法可以代替人工检测底盘螺栓是否发生偏移,检测效率高而且成本低、检测准确率高,可以降低企业的生产成本。
4.一种底盘螺栓位置检测方法,包括:
5.获取合格底盘的螺栓的设计位置;
6.对被检测底盘的不同位置进行多线条光源投影,结合光源投影获取被检测底盘的多张二维图像;
7.通过光源投影和多张二维图像,合成被检测底盘的三维图像;
8.根据合成的三维图像获得被检测底盘螺栓的实际位置;
9.将被检测底盘螺栓的实际位置与设计位置进行比较,判断实际位置与设计位置之差是否大于偏差阈值,若是,判定底盘不及格;若否,判定底盘不及格。
10.在本发明较佳的技术方案中,所述偏差阈值的获得方法为:
11.获取多个合格底盘的图像,并获取多个合格底盘图像中螺栓的合格位置;
12.将多个合格位置与设计位置进行比较,获得多个合格位置与设计位置之间的不同偏差值;
13.选取多个不同偏差值中的最大值,作为偏差阈值。
14.在本发明较佳的技术方案中,所述光源投影为垂直于底盘表面的正投影。
15.在本发明较佳的技术方案中,所述结合光源投影获取被检测底盘的多张二维图像,包括:
16.所述光源投影沿底盘的长度方向平行于底盘表面移动;
17.通过二维相机获取底盘上多个不同位置、不同角度的二维图像。
18.在本发明较佳的技术方案中,所述通过光源投影和多张二维图像,合成被检测底盘的三维图像,包括:
19.光源投影发射多条直线形成光栅,光栅照射在底盘不同的部位呈现不同的特征;
20.结合光栅的特征和底盘不同角度的二维图像,获得底盘不同位置的外形结构数据;
21.根据底盘的外形结构数据构建底盘的三维图像。
22.在本发明较佳的技术方案中,还包括:
23.获取合格底盘中各个螺栓之间的合格距离;
24.根据合成被检测底盘的三维图像,获取被检测底盘中各个螺栓之间的实际距离;
25.将实际距离与合格距离进行比较,判断螺栓是否倾斜。
26.在本发明较佳的技术方案中,所述根据合成被检测底盘的三维图像,获取被检测底盘中螺栓的实际距离,包括:
27.通过测量获得像素数与螺栓实际测量尺寸的比例关系;
28.根据所述比例关系,结合三维图像的实际像素数,获得被检测底盘中螺栓的实际距离。
29.本发明的目的之二是提供一种底盘螺栓位置检测装置,所述检测装置用于实施如上所述的底盘螺栓位置检测方法。
30.在本发明较佳的技术方案中,所述检测装置包括输送线、支架、投影光源装置以及相机,所述支架横跨在所述输送线上,所述投影光源装置设置在所述支架上,所述投影光源装置可沿所述输送线的宽度方向在所述支架上移动,所述相机设置在所述投影光源装置上;
31.所述输送线上设有第一阻挡机构和第二阻挡机构,所述第二阻挡机构位于所述支架下方,沿所述输送线的输送方向,所述第一阻挡机构位于所述第二阻挡机构的上游;所述输送线上还设有用于定位底盘的定位装置和光电感应器,所述光电感应器靠近所述定位装置设置。
32.在本发明较佳的技术方案中,所述投影光源装置包括主体和设置在主体上的灯珠,所述灯珠在所述主体上设置多列,每列所述灯珠的控制通道相互独立。
33.在本发明较佳的技术方案中,所述投影光源装置中部设有通过孔,所述相机的镜头朝向所述通过孔设置。
34.本发明的有益效果为:
35.本发明提供的一种底盘螺栓位置检测方法,该方法通过图像分析技术来判断被检测底盘的螺栓位置是否发生偏移。首先获取合格底盘的螺栓的设计位置,而后通过光源投影结合二维相机,对底盘的不同位置进行多次拍照,获取底盘不同位置的多张二维图片;再将二维图片结合光源投影的特征合成底盘的的三维图像,通过合成的三维图像判断被检测底盘螺栓的实际位置。最后将螺栓的实际位置与设计位置进行比对即可得到被检测底盘螺栓的位置是否发生偏移,进而判断被检测底盘是否合格。该方法可以代替人工检测底盘螺栓的位置、可以保证底盘螺栓检测的准确率;而且利用光源投影和二维相机图像合成三维图像,比使用三维摄像的成本低,能有效降低企业的生产成本。
36.本发明还提供的用于实施以上底盘螺栓位置检测方法的检测装置,该装置可以自动检测底盘螺栓的位置,可以挺高企业检测空调底盘的效率、保证检测的准确性,降低生产成本。
附图说明
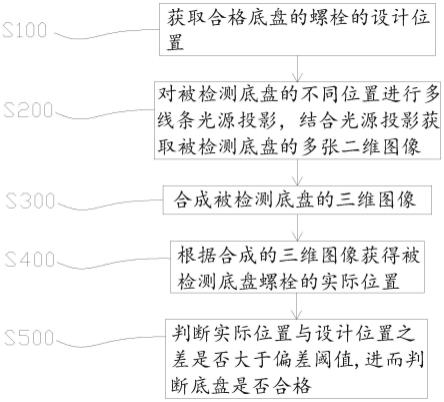
37.图1是本发明提供的底盘螺栓位置检测方法的流程图;
38.图2是本发明提供的获取被检测底盘的多张二维图像的流程图;
39.图3是本发明提供的合成被检测底盘的三维图像的流程图;
40.图4是本发明提供的底盘螺栓位置检测装置的结构示意图;
41.图5是本发明提供的投影光源装置与相机配合的结构示意图。
42.附图标记:
43.100、输送线;200、支架;300、投影光源装置;310、通过孔;400、相机;500、第二阻挡机构;600、第一阻挡机构;700、定位装置;800、光电感应器。
具体实施方式
44.下面将参照附图更详细地描述本发明的优选实施方式。虽然附图中显示了本发明的优选实施方式,然而应该理解,可以以各种形式实现本发明而不应被这里阐述的实施方式所限制。相反,提供这些实施方式是为了使本发明更加透彻和完整,并且能够将本发明的范围完整地传达给本领域的技术人员。
45.在本发明使用的术语是仅仅出于描述特定实施例的目的,而非旨在限制本发明。在本发明和所附权利要求书中所使用的单数形式的“一种”、“该”和“该”也旨在包括多数形式,除非上下文清楚地表示其他含义。还应当理解,本文中使用的术语“和/或”是指并包含一个或多个相关联的列出项目的任何或所有可能组合。
46.应当理解,尽管在本发明可能采用术语“第一”、“第二”、“第三”等来描述各种信息,但这些信息不应限于这些术语。这些术语仅用来将同一类型的信息彼此区分开。例如,在不脱离本发明范围的情况下,第一信息也可以被称为第二信息,类似地,第二信息也可以被称为第一信息。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括一个或者更多个该特征。在本发明的描述中,“多个”的含义是两个或两个以上,除非另有明确具体的限定。
47.如图1-3所示,一种底盘螺栓位置检测方法,该方法包括以下步骤:
48.s100、获取合格底盘的螺栓的设计位置;所述设计位置可以从生产资料中获得,该设计位置即空调底盘设计图中的位置。
49.s200、对被检测底盘的不同位置进行多线条光源投影,结合光源投影获取被检测底盘的多张二维图像;需要说明的是,所述光源投影为垂直于底盘表面的正投影。
50.s300、通过光源投影和多张二维图像,合成被检测底盘的三维图像;
51.s400、根据合成的三维图像获得被检测底盘螺栓的实际位置;
52.s500、将被检测底盘螺栓的实际位置与设计位置进行比较,判断实际位置与设计位置之差是否大于偏差阈值,若是,判定底盘不及格;若否,判定底盘不及格。
53.通过该方法,不仅能判断出空调底盘螺栓的位置,而且还能判断螺栓是否发生偏移,并且通过对比被检测底盘的螺栓偏移量,判断底盘是否合格,即是否能用于空调产品上。需要说明的是,利用投影光源和二维图像合成三维图像以及对判断螺栓的偏移量均通过计算机控制中心来完成。另外,该方法是利用二维照片与光源投影来合成三维图像的,相对于三维相机而言,该方法采用的设备简单、成本更低,并且检测准度能满足底盘螺栓生产
的要求。另外,在实际应用中,由于空调底盘中具有多个螺栓,该方法不局限于检测空调底盘上的单个螺栓,而是对被检测底盘上的所有螺栓的位置进行检测。
54.上述的一种底盘螺栓位置检测方法,该方法通过图像分析技术来判断被检测底盘的螺栓位置是否发生偏移。首先获取合格底盘的螺栓的设计位置,而后通过光源投影结合二维相机,对底盘的不同位置进行多次拍照,获取底盘不同位置的多张二维图片;再将二维图片结合光源投影的特征合成底盘的的三维图像,通过合成的三维图像判断被检测底盘螺栓的实际位置。最后将螺栓的实际位置与设计位置进行比对即可得到被检测底盘螺栓的位置是否发生偏移,进而判断被检测底盘是否合格。该方法可以代替人工检测底盘螺栓的位置、可以保证底盘螺栓检测的准确率;而且利用光源投影和二维相机图像合成三维图像,比使用三维摄像的成本低,能有效降低企业的生产成本。
55.进一步地,所述偏差阈值的获得方法为:
56.获取多个合格底盘的图像,并获取多个合格底盘图像中螺栓的合格位置;
57.将多个合格位置与设计位置进行比较,获得多个合格位置与设计位置之间的不同偏差值;
58.选取多个不同偏差值中的最大值,作为偏差阈值。
59.合格底盘的判断可以是人工判断的。即工人人为筛查出多个生产合格的底盘后,再检测出合格底盘中螺栓的具体位置,通过对比合格底盘的具体位置与设计位置的偏差,即可得到螺栓的合格位置与设计位置之间的不同偏差值。该偏差值是由于工艺条件和客观因素导致的,在实际生产中难以避免,但是空调的生产中允许该偏差值的存在。通过检测多个底盘的螺栓位置,进而获得多个偏差值来确定偏差阈值的方法,既能保证该偏差阈值可以使得螺栓能满足生产需求的,也拓宽了该检测方法对底盘是否合格的容忍度,使得该方法更符合实际需求。
60.进一步地,所述结合光源投影获取被检测底盘的多张二维图像,包括:
61.s210、所述光源投影沿底盘的长度方向平行于底盘表面移动;
62.s220、通过二维相机获取底盘上多个不同位置、不同角度的二维图像。
63.移动的光源投影和移动的二维相机可以对底盘的不同位置进行拍摄,以便获得底盘不同位置的结构特征。结合底盘的整体结构,光源投影平行于底盘表面移动,即光源投影的投射在底盘的上表面。不同的角度的拍摄可以是垂直于底盘的表面不同位置的光源投影以及二维拍照,通过控制光源投影的在底盘上不同位置的先后启停,实现不同部位的照射。
64.进一步地,所述通过光源投影和多张二维图像,合成被检测底盘的三维图像,包括:
65.s310、光源投影发射多条直线形成光栅,光栅照射在底盘不同的部位呈现不同的特征;因光源投影照射的位置不同,那么不同位置的光源投影照射在在底盘上就具有不同的光栅特征。
66.s320、结合光栅的特征和底盘不同角度的二维图像,获得底盘不同位置的外形结构数据;
67.s330、根据底盘的外形结构数据构建底盘的三维图像。
68.当光栅线条照照射在底盘的表面时,将以直线呈现。遇上不同的结构时光栅的线条将会呈现不同的特征,如底盘各处位置的高度不同时,光栅的线条也会呈现不同的特征,
利用该特征再结合二维相机多次多角度的拍照,合并线条数据即可获得底盘的外形结构数据,通过外形结构数据利用算法即可合成底盘的三维图像。在本技术中,主要是为了获取底盘中安装压缩机位置处的螺栓图像特征,因此二维相机的多角度拍照可以是针对压缩机安装螺栓位置而进行。
69.在本技术的另一实施例中,还包括:
70.获取合格底盘中各个螺栓之间的合格距离;
71.根据合成被检测底盘的三维图像,获取被检测底盘中各个螺栓之间的实际距离;
72.将实际距离与合格距离进行比较,判断螺栓是否倾斜。
73.判断螺栓是否倾斜,是通过合成的三维图像中的螺栓的尺寸数据来确定的。更进一步地,所述根据合成被检测底盘的三维图像,获取被检测底盘中螺栓的实际距离,包括:
74.通过测量获得像素数与螺栓实际测量尺寸的比例关系;
75.根据所述比例关系,结合三维图像的实际像素数,获得被检测底盘中螺栓的实际距离。
76.通常地,底盘上的螺栓是压缩机的安装螺栓,判断各个螺栓之间的距离是否合格,可以从“各个螺栓之间的相互距离”以及“螺栓与底盘边缘之间的距离”这两个维度来判断。通过合成三维图像,计算各个螺栓之间距离的像素数、螺栓与底盘边缘之间距离的像素数,根据获得的像素数与比例关系进行计算,即可得到被检测底盘的中的螺栓的实际距离。
77.所述比例关系获得是:获得二维相机400与被测螺栓之间的像素距离,并获得螺栓的实际尺寸。例如,螺栓与二维相机400的距离为100像素数,而实际测量的螺栓尺寸为200,则比例关系为1:2。那么后续测量时,根据实际获得的像素数除以以上的比例关系,即可得到各个螺栓之间的实际距离。
78.如图4-5所示,本发明还提供的用于实施以上底盘螺栓位置检测方法的检测装置,该检测装置可以自动检测底盘螺栓的位置,可以挺高企业检测空调底盘的效率、保证检测的准确性,降低生产成本。
79.进一步地,所述检测装置包括输送线100、支架200、投影光源装置300以及相机400,所述支架200横跨在所述输送线100上,所述投影光源装置300设置在所述支架200上,所述投影光源装置300可沿所述输送线100的宽度方向在所述支架200上移动,所述相机400设置在所述投影光源装置300上。更具体地,所述支架200的长度方向沿所述输送线100的宽度方向设置,所述支架200上设有滑轨,所述投影光源装置300可以在所述滑轨上滑动,以实现不同位置的投影、拍照。
80.所述输送线100上设有第一阻挡机构600和第二阻挡机构500,所述第二阻挡机构500位于所述支架200下方,沿所述输送线100的输送方向,所述第一阻挡机构600位于所述第二阻挡机构500的上游;所述输送线100上还设有用于定位底盘的定位装置700和光电感应器800,所述光电感应器800靠近所述定位装置700设置。所述第一阻挡机构600和所述第二阻挡机构500的结构相同,均包括驱动气缸和阻挡杆,驱动气缸安装在输送线100下方,驱动气缸驱动阻挡杆在输送线100表面伸缩,实现对底盘的阻挡或放行。
81.所述输送线100用于输送空调外机底盘,在实际应用中,所述输送线100可以是辊筒输送线100,相邻辊筒之间存在一定的间隙。所述第一阻挡机构600和所述第二阻挡机构500均设置在输送线100的底部。该装置具体的工作过程如下:空调底盘从输送线100的入口
端被送入,且被输送线100输送。当底盘被送至支架200下方是,所述光电感应器800检测到底盘输送到位,所述第二阻挡机构500升起,对底盘进行阻挡、定位。而后,所述定位装置700夹紧底盘,避免检测时底盘歪斜、晃动影响相机400成像。在一种实施例中,所述定位装置700设置在所述输送线100相对的两侧,底盘被输送到位后定位装置700从两侧夹紧底盘。在支架200下方的底盘被夹紧的同时,第一阻挡机构600同时升起,阻止后续的底盘移动,避免下一个底盘的继续流入与正在检测底盘发生碰撞,减少外界因素干扰相机400成像,保证相机400拍照取样合成图像的清晰度、保证检测数据的准确性。底盘被定位装置700夹紧后,投影光源装置300和二维相机400即进行拍照取样,并把所取得的数据反馈到处理中心,处理中心通过机械结构和视觉检测技术的结合即可实现底盘的三维检测。
82.进一步地,所述投影光源装置300包括主体和设置在主体上的灯珠,所述灯珠在所述主体上设置多列,每列所述灯珠的控制通道相互独立。
83.每列灯珠都是独立控制的,在二维相机400拍摄过程中,可以通过先后控制灯珠开关和相机400拍照同步即可取得相对应的尺寸数据,也可避免不同通道灯珠的光线线条的互相干扰。同样地,由于各列灯珠是独立控制的,因此实际应用中可以选择性开启不同的灯珠,进而获得底盘不同部位的光栅数据,为合成不同部位的三维图像提供数据支持。
84.在另一种实施例中,所述投影光源装置300中部设有通过孔310,所述相机400的镜头朝向所述通过孔310设置。相机400可以通过所述通过孔310对位于所述投影光源装置300下方的底盘进行拍照。
85.上文中已经参考附图详细描述了本技术的方案。在上述实施例中,对各个实施例的描述都各有侧重,某个实施例中没有详细描述的部分,可以参见其他实施例的相关描述。本领域技术人员也应该知悉,说明书中所涉及的动作和模块并不一定是本技术所必须的。另外,可以理解,本技术实施例方法中的步骤可以根据实际需要进行顺序调整、合并和删减,本技术实施例装置中的模块可以根据实际需要进行合并、划分和删减。
86.附图中的流程图和框图显示了根据本技术的多个实施例的系统和方法的可能实现的体系架构、功能和操作。在这点上,流程图或框图中的每个方框可以代表一个模块、程序段或代码的一部分,所述模块、程序段或代码的一部分包含一个或多个用于实现规定的逻辑功能的可执行指令。也应当注意,在有些作为替换的实现中,方框中所标记的功能也可以以不同于附图中所标记的顺序发生。例如,两个连续的方框实际上可以基本并行地执行,它们有时也可以按相反的顺序执行,这依所涉及的功能而定。也要注意的是,框图和/或流程图中的每个方框、以及框图和/或流程图中的方框的组合,可以用执行规定的功能或操作的专用的基于硬件的系统来实现,或者可以用专用硬件与计算机指令的组合来实现。
87.以上已经描述了本技术的各实施例,上述说明是示例性的,并非穷尽性的,并且也不限于所披露的各实施例。在不偏离所说明的各实施例的范围和精神的情况下,对于本技术领域的普通技术人员来说许多修改和变更都是显而易见的。本文中所用术语的选择,旨在最好地解释各实施例的原理、实际应用或对市场中的技术的改进,或者使本技术领域的其它普通技术人员能理解本文披露的各实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1