基于统计过程控制的机器人关节电流异常检测方法和装置与流程
1.本发明涉及工业机器人状态监测领域,尤其是涉及一种基于统计过程控制的机器人关节电流异常检测方法和装置。
背景技术:
2.随着自动化进程的不断推进,工业机器人发挥着越来越重要的作用,极大的提高了生产效率。但工业机器人的功能需求不断增加,结构趋于复杂,长时间运行会导致工业机器人出现故障。对工业机器人进行状态监测,检测设备是否出现异常,避免经济损失和人员伤亡。传统的工业机器人异常检测方法采集的信号为振动信号、扭矩信号、声发射信号等,中国专利申请(申请公布号为cn 111975784 a)公开了基于电流和振动信号的关节机器人故障诊断方法,利用采集到的关节电机信号得到等角度采样时序并对滤波后的振动信号进行等角度采样,最后对振动信号的等角度采样序列进行傅里叶变换得到机器人关节振动信号阶比谱并分析,实现机器人关节故障诊断。但上述采集的信号由于受采集位置等因素影响,采集的信号质量难以保障,另外相对而言其传感器成本高,而电流信号可以从工业机器人控制柜里直接获取,采集方便,成本低。
3.通过电流信号对恒速电机进行故障诊断和状态监测的研究较多,获取定子电流后,使用电流频谱分析法可以完成对电机的故障诊断和状态监测。但工业机器人的关节主要由伺服电机和减速器组成,基于电流信号对减速器和伺服电机进行状态监测和故障诊断的研究相对较少。中国专利申请(申请公布号为cn 108638128 a)公开了一种工业机器人的实时异常监测方法及其系统,该方法利用采集到的关节电流信号计算其定位偏差、电流边界、极差、方差,然后与其正常区间对比,完成异常检测。但是这种方法只能处理较为平稳的信号。而伺服电机和恒速电机的电流信号相比,其电流信号随动作周期变化具有周期性,且频率成分复杂,幅值变化剧烈,若使用常规的方法根据该电流信息进行异常检测,会导致检测结果不精确。
技术实现要素:
4.本发明的目的就是为了克服上述现有技术存在的缺陷而提供一种基于统计过程控制的机器人关节电流异常检测方法和装置。
5.本发明的目的可以通过以下技术方案来实现:
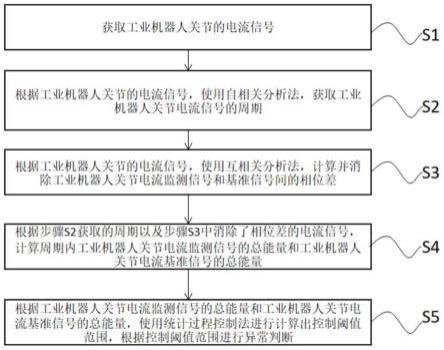
6.一种基于统计过程控制的机器人关节电流异常检测方法,其特征在于,包括以下步骤:
7.s1、获取工业机器人关节的电流信号;
8.s2、根据工业机器人关节的电流信号,使用自相关分析法,获取工业机器人关节电流信号的周期;
9.s3、根据工业机器人关节的电流信号,使用互相关分析法,计算并消除工业机器人关节电流监测信号和基准信号间的相位差;
10.s4、根据步骤s2获取的周期以及步骤s3中消除了相位差的电流信号,计算周期内工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量;
11.s5、根据工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量,使用统计过程控制法进行计算出控制阈值范围,根据控制阈值范围进行异常判断。
12.进一步地,所述步骤s5使用的统计过程控制法具体步骤如下:
13.a1、基于工业机器人关节电流基准信号的总能量,计算控制图的控制上限和控制下限,计算公式如下:
[0014][0015][0016][0017][0018]
其中,ti表示基准信号的第i份能量,表示工业机器人正常状态关节电流基准信号的周期内的总能量平均值,σ表示工业机器人正常状态关节电流基准信号的周期内的总能量的标准差,ucl表示控制上限,lcl表示控制下限;
[0019]
a2、判断工业机器人关节电流监测信号的总能量是否处于控制上限和控制下限之间,若是,则判定工业机器人不存在异常;若否,则判定工业机器人存在异常。
[0020]
进一步地,所述步骤s1中,获取电流信号的方法为将工业机器人控制柜中u、v相线缆穿过电流互感器,采集每个关节的u、v相电流。
[0021]
进一步地,所述步骤s2的自相关分析法具体步骤为求出工业机器人关节电流信号的自相关函数,然后将序列长度归一化消除时滞的影响,最后求出工业机器人关节电流信号自相关函数最大峰值间的索引距离,得到工业机器人关节电流信号一个周期的数据点数及工业机器人关节电流信号一个周期的时间;
[0022]
所述自相关函数的计算表达式如下:
[0023][0024]
其中,h为阶数,μ为序列的均值,x为输入信号的时间序列。
[0025]
进一步地,步骤s3中互相关分析法的互相关函数的计算表达式如下:
[0026][0027]
其中,f(x)表示工业机器人关节电流监测信号,g(x)表示工业机器人正常状态关节电流基准信号,m表示信号间的相位差。
[0028]
一种基于统计过程控制的机器人关节电流异常检测装置,包括存储器和处理器;所述存储器,用于存储计算机程序;所述处理器,用于当执行所述计算机程序时,实现以下方法:
[0029]
s1、获取工业机器人关节的电流信号;
[0030]
s2、根据工业机器人关节的电流信号,使用自相关分析法,获取工业机器人关节电流信号的周期;
[0031]
s3、根据工业机器人关节的电流信号,使用互相关分析法,计算并消除工业机器人关节电流监测信号和基准信号间的相位差;
[0032]
s4、根据步骤s2获取的周期以及步骤s3中消除了相位差的电流信号,计算周期内工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量;
[0033]
s5、根据工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量,使用统计过程控制法进行计算出控制阈值范围,根据控制阈值范围进行异常判断。
[0034]
进一步地,所述步骤s5使用的统计过程控制法具体步骤如下:
[0035]
a1、基于工业机器人关节电流基准信号的总能量,计算控制图的控制上限和控制下限,计算公式如下:
[0036][0037][0038][0039][0040]
其中,ti表示基准信号的第i份能量,表示工业机器人正常状态关节电流基准信号的周期内的总能量平均值,σ表示工业机器人正常状态关节电流基准信号的周期内的总能量的标准差,ucl表示控制上限,lcl表示控制下限;
[0041]
a2、判断工业机器人关节电流监测信号的总能量是否处于控制上限和控制下限之间,若是,则判定工业机器人不存在异常;若否,则判定工业机器人存在异常。
[0042]
进一步地,所述步骤s1中,获取电流信号的方法为将工业机器人控制柜中u、v相线缆穿过电流互感器,采集每个关节的u、v相电流。
[0043]
进一步地,所述步骤s2的自相关分析法具体步骤为求出工业机器人关节电流信号的自相关函数,然后将序列长度归一化消除时滞的影响,最后求出工业机器人关节电流信号自相关函数最大峰值间的索引距离,得到工业机器人关节电流信号一个周期的数据点数及工业机器人关节电流信号一个周期的时间;
[0044]
所述自相关函数的计算表达式如下:
[0045][0046]
其中,h为阶数,μ为序列的均值,x为输入信号的时间序列。
[0047]
进一步地,步骤s3中互相关分析法的互相关函数的计算表达式如下:
[0048][0049]
其中,f(x)表示工业机器人关节电流监测信号,g(x)表示工业机器人正常状态关节电流基准信号,m表示信号间的相位差。
[0050]
与现有技术相比,本发明具有以下优点:
[0051]
本发明先后通过自相关分析法和互相关分析法获取了电流信号的周期,并消除了基准信号和监测信号的相位差,最后通过统计过程控制的方法确定了异常判断的阈值,对复杂的伺服电机的电流信号中复杂的频率成分进行了处理,并通过统计过程控制的方法避免了幅值变化剧烈带来的干扰,提高了异常检测的准确性,且仅仅依靠采集电流信号就完成了异常的检测,成本低、计算量小,具有良好的经济效益。
附图说明
[0052]
图1为本发明的流程示意图。
[0053]
图2为工业机器人正常状态关节电流基准信号1_u时域图。
[0054]
图3为工业机器人正常状态关节电流基准信号2_u时域图。
[0055]
图4为工业机器人正常状态关节电流基准信号3_u时域图。
[0056]
图5为工业机器人正常状态关节电流基准信号4_u时域图。
[0057]
图6为工业机器人正常状态关节电流基准信号5_u时域图。
[0058]
图7为工业机器人正常状态关节电流基准信号6_u时域图。
[0059]
图8为工业机器人正常状态关节电流基准信号1_v时域图。
[0060]
图9为工业机器人正常状态关节电流基准信号2_v时域图。
[0061]
图10为工业机器人正常状态关节电流基准信号3_v时域图。
[0062]
图11为工业机器人正常状态关节电流基准信号4_v时域图。
[0063]
图12为工业机器人正常状态关节电流基准信号5_v时域图。
[0064]
图13为工业机器人正常状态关节电流基准信号6_v时域图。
[0065]
图14为工业机器人正常状态关节电流基准信号1_u自相关函数图像。
[0066]
图15为工业机器人正常状态关节电流基准信号1_u信号分割图像。
[0067]
图16为工业机器人正常状态电流基准信号1_u和故障状态关节电流监测信号1_u的时域图像对比图。
[0068]
图17为工业机器人正常状态电流基准信号1_u和故障状态关节电流监测信号消除相位差后的1_u的时域图像对比图。
[0069]
图18为工业机器人电流信号1_u的控制图。
[0070]
图19为工业机器人电流信号1_v的控制图。
[0071]
图20为工业机器人电流信号2_u的控制图。
[0072]
图21为工业机器人电流信号2_v的控制图。
[0073]
图22为工业机器人电流信号3_u的控制图。
[0074]
图23为工业机器人电流信号3_v的控制图。
[0075]
图24为工业机器人电流信号4_u的控制图。
[0076]
图25为工业机器人电流信号4_v的控制图。
[0077]
图26为工业机器人电流信号5_u的控制图。
[0078]
图27为工业机器人电流信号5_v的控制图。
[0079]
图28为工业机器人电流信号6_u的控制图。
[0080]
图29为工业机器人电流信号6_v的控制图。
具体实施方式
[0081]
下面结合附图和具体实施例对本发明进行详细说明。本实施例以本发明技术方案为前提进行实施,给出了详细的实施方式和具体的操作过程,但本发明的保护范围不限于下述的实施例。
[0082]
实施例1:
[0083]
本实施例提供了一种基于统计过程控制的机器人关节电流异常检测方法,如图1所示,包括以下步骤:
[0084]
步骤s1、获取工业机器人关节的电流信号,
[0085]
步骤s2、使用自相关分析法,获取工业机器人关节电流信号的周期;
[0086]
步骤s3、使用互相关分析法,计算并消除工业机器人关节电流监测信号和基准信号间的相位差;
[0087]
步骤s4、根据步骤s2获取的周期,计算周期内工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量;
[0088]
步骤s5、根据工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量,使用统计过程控制法进行异常检测。
[0089]
在本实施例中,步骤s1具体如下:
[0090]
将工业机器人控制柜中u、v相线缆穿过电流互感器,采集每个关节的u、v相电流。该工业机器人为六轴串联机器人,同时采集六个关节的电流信号,采集正常状态和故障状态的电流信号,采样频率为10khz,采样点数为200000。此时可获取工业机器人正常状态下的12维电流信号和工业机器人故障状态下的12维电流信号。电流信号具体数据由表1和表2所示,电流信号时域图如图2-图13所示。在本实施例中,选用正常状态下的电流基准信号和故障状态下的电流监测信号,以验证其有效性。
[0091]
表1工业机器人正常状态下关节电流基准信号数据
[0092][0093]
表2工业机器人故障状态下关节电流监测信号数据
[0094][0095]
在本实施例中,步骤s2具体如下:
[0096]
求出工业机器人关节电流信号的自相关函数,然后将序列长度归一化消除时滞的影响,最后求出工业机器人关节电流信号自相关函数最大峰值间的索引距离,得到工业机器人关节电流信号一个周期的数据点数及工业机器人关节电流信号一个周期的时间。计算得到的自相关图像如图14所示。计算得到两个峰值间的距离为28627个数据点(即工业机器人关节电流信号的周期2.8627秒)。即工业机器人正常状态关节电流信号1_u的周期点数为
28627个数据点。通过计算得到的周期点数进行工业机器人正常状态关节电流信号1_u的数据分割,如图15所示。分析得到采集到的工业机器人正常状态关节电流信号1_u包含6个完整的周期电流信号,第7个周期的信号是不完整的。后续研究基于6个完整周期的工业机器人正常状态关节电流信号1_u展开分析。同理计算其它维度的正常状态和故障状态下的工业机器人关节电流信号,得到相同结果即关节电流信号的周期点数都为28627个数据点,后续研究也基于6个完整周期的工业机器人正常状态关节电流信号展开分析。
[0097]
在本实施例中,步骤s3具体如下:
[0098]
将工业机器人故障状态关节电流监测信号和工业机器人正常状态关节电流基准信号做分析对比时,两种信号间会存在相位差距,不便分析。为消除工业机器人关节电流监测信号和工业机器人正常状态关节电流基准信号间的相位差距,将工业机器人关节电流监测信号和工业机器人正常状态关节电流基准信号通过互相关计算,找到信号间的滞后差异。其中,互相关函数的计算表达式如下:
[0099][0100]
其中,f(x)和g(x)表示工业机器人关节电流监测信号和工业机器人正常状态关节电流基准信号,m表示信号间的相位差距。通过互相关函数计算得到工业机器人关节电流监测信号和工业机器人正常状态关节电流基准信号的相位差距后,以工业机器人正常状态关节电流基准信号为基准,将工业机器人关节电流监测信号根据相位差距的计算结果完成相位移动,消除工业机器人关节电流监测信号和工业机器人正常状态关节电流基准信号间的相位差距。
[0101]
如图16所示。通过时域图对比发现,工业机器人正常状态关节电流基准信号和工业机器人故障状态关节电流监测信号存在相位差,不便分析。通过互相关分析方法计算出工业机器人正常状态关节电流基准信号1_u和工业机器人故障状态关节电流监测信号1_u的相位差为5294(即工业机器人正常状态关节电流信号1_u和工业机器人故障状态关节电流监测信号1_u的相位时间差为0.5294秒)。即以工业机器人正常状态关节电流基准信号1_u为基准,工业机器人故障状态关节电流监测信号1_u相位向左移动5294个数据点,如图17所示。工业机器人正常状态关节电流基准信号1_u和工业机器人故障状态关节电流监测信号1_u在时域上没有了相位差距,便于后续分析。消除相位差后可以通过工业机器人正常状态关节电流基准信号和工业机器人故障状态关节电流监测信号进行时域图像的对比,观察是否存在异常,做定性的分析。工业机器人关节电流信号“1_v”“2_u”“2_v”“3_u”“3_v”“4_u”“4_v”“5_u”“5_v”“6_u”“6_v”正常信号和故障信号间的相位差分别为5291,5329,5328,5056,5057,-944,-944,-10566,-10566,1863,1863,同样根据相位点数差进行移动,消除时域相位差距,进行时域图像对比,做定性分析。
[0102]
在本实施例中,步骤s4的计算结果如表3所示,s1至s6表示第一个周期至第六个周期。
[0103]
表3工业机器人正常状态基准电流信号和故障状态关节监测电流信号周期内总能量
[0104] s1s2s3s4s5s6基准信号60922.157793.664101.670648.961572.458183.5
监测信号5581767459.161972.256103.365147.464068.4
[0105]
在本实施例中,步骤s5具体包括以下步骤:
[0106]
步骤a1、基于工业机器人正常状态关节电流基准信号的总能量,计算控制图的控制上限和控制下限,计算公式如下:
[0107][0108][0109][0110][0111]
其中,ti表示基准信号的第i份能量,表示工业机器人正常状态关节电流基准信号的周期内的总能量平均值,σ表示工业机器人正常状态关节电流基准信号的周期内的总能量的标准差,ucl表示控制上限,lcl表示控制下限。最终,计算出控制上限为ucl为75198.45,控制下限lcl为49208.93。
[0112]
步骤a2、判断工业机器人故障状态关节电流监测信号的总能量是否处于控制上限和控制下限之间,若是,则判定工业机器人不存在异常;若否,则判定工业机器人存在异常。
[0113]
工业机器人故障状态关节监测电流信号“1_v”“2_u”“2_v”“3_u”“3_v”“4_u”“4_v”“5_u”“5_v”“6_u”“6_v”的控制图如图18-图29所示。分析可得工业机器人故障状态关节监测电流信号“2_v”“4_u”“4_v”“5_u”“5_v”“6_u”“6_v”均超出控制上限,工业机器人存在异常。经现场查看发现工业机器人二号关节发生异常且由于传感器设置问题导致监测到的电流信号存在削波现象,由于关节运动的传递关系,由于故障引起的波动将故障信号放大传递至4,5,6轴。因此,本实施例提出的基于统计过程控制的工业机器人关节电流信号异常检测方法成功完成了对工业机器人的异常检测。
[0114]
实施例2:
[0115]
本实施例提供了一种基于统计过程控制的机器人关节电流异常检测装置,包括存储器和处理器;存储器,用于存储计算机程序;处理器,用于当执行计算机程序时,实现以下方法:
[0116]
步骤s1、获取工业机器人关节的电流信号;
[0117]
步骤s2、根据工业机器人关节的电流信号,使用自相关分析法,获取工业机器人关节电流信号的周期;
[0118]
步骤s3、根据工业机器人关节的电流信号,使用互相关分析法,计算并消除工业机器人关节电流监测信号和基准信号间的相位差;
[0119]
步骤s4、根据步骤s2获取的周期以及步骤s3中消除了相位差的电流信号,计算周期内工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量;
[0120]
步骤s5、根据工业机器人关节电流监测信号的总能量和工业机器人关节电流基准信号的总能量,使用统计过程控制法进行计算出控制阈值范围,根据控制阈值范围进行异
常判断。
[0121]
实施例3:
[0122]
本实施例提供了一种计算机可读存储介质,其上存储有计算机程序,该程序被处理器执行时实现如本发明实施例1中提到的基于统计过程控制的机器人关节电流异常,可以采用一个或多个计算机可读的介质的任意组合。计算机可读介质可以是计算机可读信号介质或者计算机可读存储介质。计算机可读存储介质例如可以是——但不限于——电、磁、光、电磁、红外线、或半导体的系统、装置或器件,或者任意以上的组合。计算机可读存储介质的更具体的例子(非穷举的列表)包括:具有一个或多个导线的电连接、便携式计算机磁盘、硬盘、随机存取存储器(ram)、只读存储器(rom)、可擦式可编程只读存储器(eprom或闪存)、光纤、便携式紧凑磁盘只读存储器(cd-rom)、光存储器件、磁存储器件、或者上述的任意合适的组合。在本文件中,计算机可读存储介质可以是任何包含或存储程序的有形介质,该程序可以被指令执行系统、装置或者器件使用或者与其结合使用。
[0123]
以上详细描述了本发明的较佳具体实施例。应当理解,本领域的普通技术人员无需创造性劳动就可以根据本发明的构思作出诸多修改和变化。因此,凡本技术领域中技术人员依本发明的构思在现有技术的基础上通过逻辑分析、推理或者有限的实验可以得到的技术方案,皆应在由权利要求书所确定的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1