定位装置以及定位方法与流程
1.本发明的实施方式涉及一种定位装置。
背景技术:
2.通过使用了从人造卫星发送的电波信号的卫星接收控制来进行铁道车辆位置的计测,但根据铁道沿线的环境不同,由于多路径等问题而计测精度恶化到最大
±
10m。由于该影响,在卫星接收控制中,作为基于自动驾驶的铁道车辆的位置的计测方法,计测精度有时会变低。此外,在隧道、桥上车站等的高架下、地下区间等卫星所发送的电波无法到达而无法进行卫星接收控制的区域中,也有可能无法掌握铁道车辆的行驶位置。
3.因此,存在如下期望:在卫星接收控制的执行中,例如想要切换成通过设置于铁道车辆的速度传感器、加速度传感器等来计测铁道车辆的位置的独立计测控制。
4.专利文献1:日本特开2016-005373号公报
技术实现要素:
5.为了解决这种问题,本发明的目的在于提供能够提高计测精度的定位装置以及定位方法。
6.实施方式的定位装置具备卫星接收控制部、独立计测控制部以及判别部。卫星接收控制部进行与从人造卫星发送、用于计测车辆位置的第1信息的接收相关的第1控制。独立计测控制部进行与从传感器发送、用于计测车辆位置的第2信息的接收相关的第2控制。判别部根据第1信息以及第2信息的接收状况,判别进行卫星接收控制和独立计测控制中的至少哪一个。
附图说明
7.图1是表示第1实施方式的定位装置的概要的框图。
8.图2是表示接收运算处理装置的框图。
9.图3是表示定位信号运算部的处理的流程图。
10.图4是表示独立计测运算部的处理的流程图。
11.图5是表示计测铁道车辆的位置的状况的概念图。
12.图6是表示状态判别部的处理的流程图(其1)。
13.图7是表示状态判别部的处理的流程图(其2)。
14.图8是表示对卫星接收控制部的仰角进行控制的处理的流程图。
15.图9是表示对卫星接收控制部的电波信号的接收灵敏度进行控制的处理的流程图。
16.图10是表示切换判别部的处理的流程图。
17.图11是卫星接收控制部选择人造卫星的状况的说明图。
18.图12是对卫星接收控制部的仰角进行控制的状况的说明图。
19.图13是表示卫星接收控制部对区域内所配置的人造卫星进行选择的状况的说明图。
20.图14是表示卫星接收控制部22基于区域的优先顺序选择人造卫星12的状况的说明图。
21.图15是表示在卫星接收控制的执行中进行是否执行独立计测控制的判断的状况的流程图。
22.图16是表示卫星定位控制中的定位点的误差的概念图。
23.图17是表示卫星接收控制部22中的卫星选择的处理的流程图。
24.图18是表示卫星接收控制中的推定距离误差的概念图。
25.图19是表示卫星接收控制的处理流程的流程图(其1)。
26.图20是表示卫星接收控制的处理流程的流程图(其2)。
27.图21是表示地图连动控制的执行状况的说明图。
28.符号的说明
29.10:定位装置;13:接收天线装置;14:外部设备;15:接收运算处理装置;21:定位信号运算部;22:卫星接收控制部;23:独立计测运算部;24:状态判别部;25:车辆位置校正部;26:切换判别部;27:存储装置;28:通信连接装置;29:地图db;csu:3轴传感器部;dg:卫星定位数据组;ds:独立定位数据组。
具体实施方式
30.以下,参照附图对实施方式的定位装置以及定位方法进行详细说明。
31.图1是表示第1实施方式的定位装置10的概要的框图。定位装置10搭载于铁道车辆11,能够基于从人造卫星12发送的电波信号sx计测铁道车辆11的位置。该定位装置10具备接收天线装置13、外部设备14以及接收运算处理装置15。另外,在本实施方式中,以n=4来图示电波信号sx1~sxn以及人造卫星12-1~12-n,但并不限定于此。例如,n也可以为5以上的自然数。
32.接收天线装置13是能够接收电波信号sx的天线装置。电波信号sx是包含用于计测铁道车辆11的位置的信息的信号。外部设备14是基于定位结果进行铁道车辆11的行驶控制的设备,例如是列车综合管理装置(tcms)、面向自动驾驶的驾驶员辅助控制装置、车上监视器等。接收运算处理装置15基于接收天线装置13输出的电波信号sx进行用于确定铁道车辆11的位置的运算处理,并将运算结果输出至外部设备14。
33.图2是表示接收运算处理装置15的构成的框图。接收运算处理装置15具有定位信号运算部21、卫星接收控制部22、独立计测运算部23、状态判别部24、车辆位置校正部25、切换判别部26、存储装置27、通信连接装置28以及地图db29。此外,在图2中还图示出3轴传感器部csu。3轴传感器部csu例如是包括3轴加速度传感器、3轴陀螺仪传感器以及3轴地磁传感器的3轴传感器。
34.定位信号运算部21基于接收天线装置13接收的电波信号sx对铁道车辆11的位置坐标进行运算,并输出卫星定位数据组dg。在卫星定位数据组dg中包含铁道车辆11的位置坐标、时刻、电波信号sx中包含的卫星轨道信息(例如卫星历书信息以及卫星星历信息)以及电波信号sx的接收信号的强度等。
35.卫星接收控制部22进行使用了人造卫星12发送的电波信号sx的卫星接收控制,并进行铁道车辆11的位置的计测。
36.具体而言,卫星接收控制部22以铁道车辆11的行进方向dr以及位置坐标(x,y,z)为基准,根据人造卫星12的z方向的位置来计算仰角。
37.此外,卫星接收控制部22以铁道车辆11的行进方向dr以及位置坐标(x,y,z)为基准,根据人造卫星12的xy方向的位置来计算方位角。另外,卫星接收控制部22也可以基于卫星历书信息来计算仰角以及方位角。
38.此外,卫星接收控制部22对pdop(根据接收到的信号推定出的位置精度的变化率)的值进行运算。dop(dilution of precision:精度因子)是将卫星的配置状态指标化而得到的,与对象位置的计测精度之间的相关关系较高。例如,dop示出值越小则计测铁道车辆11的位置的精度越高的倾向。dop具有将卫星的水平方向的几何学配置指标化而得到的hdop(horizontal dop)、将卫星的铅垂方向的几何学配置指标化而得到的vdop(vertical dop)、将这些合成而得到的pdop(position dop)等。在本实施方式中,通常使用pdop的值。
39.进而,卫星接收控制部22对pacc3d的值进行运算。pacc是表示铁道车辆11的位置的计测精度、以及人造卫星12发送的电波信号sx的信号强度的指标。例如,pacc示出值越小则计测铁道车辆11的位置的精度越高、电波信号sx的信号强度越高的倾向。pacc具有将铁道车辆的水平方向的位置精度指标化而得到的pacch、将铁道车辆的铅垂方向的位置精度指标化而得到的paccv、将铁道车辆的3轴(xyz)方向的位置精度指标化而得到的pacc3d等。在本实施方式中,通常使用pacc3d的值。
40.独立计测运算部23(独立计测运算部的一例)基于3轴传感器部csu的输出而输出独立定位数据组ds。在独立定位数据组ds中包含时刻、速度、加速度、角度以及行驶向量等。即,独立计测运算部23通过使用一般的运算方法对这些进行运算,由此执行计测铁道车辆11的位置的独立计测控制。例如,基于3轴加速度传感器的输出,对3轴方向的加速度进行时间累计,由此对3轴方向的行驶向量进行运算。此外,速度例如能够作为3轴方向的行驶向量的绝对值来进行运算。换言之,独立计测运算部23进行与从传感器发送、用于计测铁道车辆11的位置的信息的接收相关的独立计测控制。
41.此外,独立计测运算部23使用独立定位数据组ds的信息对基于卫星定位数据组dg的铁道车辆11的位置坐标进行校正运算,并输出铁道车辆11的位置信息。即,独立计测运算部23使用独立定位数据组ds的信息对从基准位置起的铁道车辆11的位置坐标的时间序列变化进行运算。
42.独立计测运算部23对3轴方向的速度、加速度以及角度进行运算,输出包含这些信息的独立定位数据组ds,并将其与时刻一起存储于存储装置27。此时,独立计测运算部23基于独立定位数据组ds对铁道车辆11的位置坐标进行运算,并将其与时刻一起存储于存储装置27。
43.状态判别部24例如基于卫星定位数据组dg、独立定位数据组ds,判别铁道车辆11的状态(例如铁道车辆11是正在行驶的状态、停止的状态、或是产生故障的状态等)。
44.车辆位置校正部25至少使用卫星定位数据组dg中包含的信息或者独立定位数据组ds中包含的信息,对从基准位置起的铁道车辆11的位置坐标的时间序列变化进行运算。该基准位置是在过去进行过定位或者独立运算的位置的平均位置。例如,基准位置是通过
同一地面信标时的定位位置的过去10次的平均值。
45.切换判别部26根据从人造卫星发送的用于计测车辆位置的信息以及从传感器发送的用于计测车辆位置的信息的接收状况,判别是否进行卫星接收控制和独立计测控制中的至少哪一个。
46.此外,切换判别部26判别将卫星接收控制部22通过卫星接收控制(第1控制的一例)计测出的位置坐标和独立计测运算部23通过独立计测控制(第2控制的一例)输出的位置坐标中的哪个设为铁道车辆11的位置坐标。
47.例如,切换判别部26判别是否存在于电波信号sx被遮断、铁道车辆11无法捕捉到人造卫星12的环境下。当判别为在无法捕捉到人造卫星12的环境下卫星接收控制部22无法进行卫星接收控制的情况下,独立计测运算部23执行独立计测控制而计算铁道车辆11的位置。
48.存储装置27例如通过ram(random access memory)、闪存器等半导体存储元件、硬盘、光盘等实现。存储装置27存储各种信息。通信连接装置28在存储装置27与外部设备14之间进行通信。
49.地图db29(地图信息存储部的一例)例如保存地图信息,该地图信息在地图上示出隧道、车站、桥梁等人造卫星12发送的电波信号sx的接收状况恶化的特定区域以及该区域的入口、出口等。然后,例如卫星接收控制部22或者独立计测运算部23进行地图连动控制,该地图连动控制是一边参照保存于地图db29的该地图信息一边并行地进行卫星接收控制或者独立计测控制的控制。另外,卫星接收控制部22和独立计测运算部23也可以分别一边执行卫星接收控制和独立计测控制一边执行地图连动控制。
50.图3是定位信号运算部21的处理流程图。定位信号运算部21经由接收天线装置13接收电波信号sx1~sx4(步骤s11)。
51.接着,定位信号运算部21从电波信号sx1~sx4中提取时刻信号,并取得与时刻信息相关的数据(步骤s12)。接着,定位信号运算部21基于卫星轨道信息(例如,卫星历书信息以及卫星星历信息)以及所得到的时刻信号,取得与包含纬度信息以及经度信息的位置信息相关的数据(步骤s13)。
52.此处,对位置信息的取得方法的详细情况进行说明。定位信号运算部21例如使用来自人造卫星12-1~12-4的轨道信息来计算铁道车辆11的位置坐标(x,y,z)。即,根据将人造卫星12-1~12-4的位置以及这一瞬间的人造卫星12-1~12-4与接收运算处理装置15之间的距离作为组的信息,计算铁道车辆11的位置坐标(x,y,z)。在该情况下,只要人造卫星的位置以及这一瞬间的人造卫星与接收运算处理装置15之间的距离的信息的组存在3个以上,就能够计算出坐标(x,y,z)。另外,为了确保时刻的准确性,一般需要第4个卫星。
53.更详细来说,定位信号运算部21基于卫星轨道信息(例如,卫星历书信息以及卫星星历信息)以及所得到的时刻信号,通过下述式子来计算铁道车辆11的位置坐标(x,y,z)。
54.【数式1】
[0055][0056]
在上述式子中,(x,y,z)是想要求出的位置的坐标值的参数,(xn,yn,zn)是发送电波信号sx的人造卫星12的位置的坐标值的参数。此外,t是定位的时刻的参数,tn是人造卫星12发送电波信号sx的时刻的参数。另外,定位信号运算部21也可以经由地面的基站等接收电波信号sx。定位信号运算部21根据这4个参数通过最小二乘法等计算出想要检测的位置信息。
[0057]
接着,定位信号运算部21取得与计测铁道车辆11的位置的人造卫星12相关的数据(步骤s14)。例如,定位信号运算部21基于规定的运算来取得在定位中使用的人造卫星12的数量。
[0058]
进而,定位信号运算部21取得其他数据(步骤s15)。定位信号运算部21输出包含这些信息的卫星定位数据组dg,并将其存储于存储装置27。
[0059]
图4是表示独立计测运算部23的处理的流程图。独立计测运算部23从3轴传感器部csu取得3轴加速度传感器的数据(步骤s21),取得3轴陀螺仪传感器的数据(步骤s22),并且取得3轴地磁传感器的数据(步骤s23)。另外,并不一定需要取得3轴地磁传感器的数据,也可以仅取得3轴加速度传感器以及3轴陀螺仪传感器的两种数据。
[0060]
接着,独立计测运算部23判别是否取得了0.1秒量的各个传感器的数据。在判别为未取得0.1秒量的情况下(步骤s24的“否”),返回步骤s21并反复进行处理。在判别为在取得了0.1秒量的情况下(步骤s24的“是”),计算出各个传感器的数据的平均值(步骤s25),并结束处理。
[0061]
图5是表示计测铁道车辆11的位置的状况的概念图。例如,在独立计测运算部23运算出铁道车辆11位于线路上由〇标记所示的部位的情况下,切换判别部26判别为仅通过独立计测控制就能够计测出铁道车辆11的位置。另一方面,在独立计测运算部23运算出铁道车辆11位于线路上由
×
标记所示的部位的情况下,切换判别部26判别为需要代替独立计测控制或者与独立计测控制并行地进行卫星接收控制,来计测铁道车辆11的位置。
[0062]
图6是表示状态判别部的处理的流程图(其1)。状态判别部24判定定位信号运算部21是否基于从人造卫星12接收到的电波信号sx计算出铁道车辆11的速度(步骤s31)。在判定为定位信号运算部21未计算出速度的情况下(步骤s31的“否”),状态判别部24判定为无法从人造卫星12接收电波信号sx(步骤s32),并前进至步骤s36。在判定为定位信号运算部21计算出速度(步骤s31的“是”)的情况下,状态判别部24判定铁道车辆11的速度是否小于阈值(步骤s33)。在速度小于阈值的情况下(步骤s33的“是”),状态判别部24判定为铁道车辆11停止(步骤s34),并前进至步骤s36。在速度不小于阈值的情况下(步骤33的“是”),状态判别部24判定为铁道车辆11正在行驶(步骤s35),并前进至步骤s36。
[0063]
接着,状态判别部24判定独立计测运算部23是否计算出加速度(步骤s36)。在判定为未计算出加速度的情况下(步骤s36的“否”),状态判别部24判定为无法使用加速度传感器(步骤s37),并前进至步骤s41。在判定为计算出加速度的情况下(步骤36的“是”),状态判
别部24判定铁道车辆11的加速度是否小于阈值(步骤s38)。在加速度小于阈值的情况下(步骤38的“是”),状态判别部24判定为铁道车辆11停止(步骤s39),并前进至步骤s41。在加速度不小于阈值的情况下(步骤s38的“否”),状态判别部24判定为铁道车辆11正在行驶(步骤s40),并前进至步骤41。
[0064]
接着,状态判别部24判定独立计测运算部23是否计算出角度(步骤s41)。在判定为未计算出角度的情况下(步骤41的“否”),状态判别部24判定为无法使用角度传感器(步骤s42),并前进至步骤s51。在判定为计算出角度的情况下(步骤41的“是”),状态判别部24判定铁道车辆11的角度是否小于阈值(步骤s43)。在判定为角度小于阈值的情况下(步骤43的“是”),状态判别部24判定为铁道车辆11停止(步骤s44),并前进至步骤51。在角度不小于阈值的情况下(步骤43的“否”),状态判别部24判定为铁道车辆11正在行驶(步骤s45),并前进至步骤s51(接着图7的a)。
[0065]
图7是表示状态判别部的处理的流程图(其2)。状态判别部24判别是否未计算出速度、加速度、角度中的至少一个(步骤s51)。在判定为未计算出速度、加速度、角度中的至少一个的情况下(步骤s51的“是”),状态判别部24判定为铁道车辆11发生故障(步骤s52),并结束处理。
[0066]
在判定为计算出速度、加速度、角度中的至少一个的情况下(步骤s51的“否”),状态判别部24判定是否进行了至少一次停止判定(步骤s53)。即,状态判别部24判别处于车辆停止的停止状态和车辆正在行驶的行驶状态中的哪一个状态。在判定为进行了至少一次停止判定的情况下(步骤s53的“是”),状态判别部24判定为铁道车辆11停止(步骤s54)。之后,状态判别部24取得100ms前的铁道车辆11的位置(步骤s55),然后输出表示正在停止的含义的数据(步骤s56),并结束处理。
[0067]
在判定为未进行至少一次停止判定的情况下(步骤s53的“否”),状态判别部24判定为铁道车辆11正在行驶(步骤s57),并前进至步骤s61以及步骤s71(接着图8的b以及图9的c)。
[0068]
图8是表示控制卫星接收控制部22的仰角的处理的流程图。状态判别部24判别卫星接收控制部22是否计算出pdop(步骤s61)。在判定为卫星接收控制部22未计算出pdop的情况下(步骤s61的“否”),卫星接收控制部22输出仰角(角度)的复位值(步骤s62),并结束处理。
[0069]
在判定为卫星接收控制部22计算出pdop(位置精度降低率)的情况下(步骤s61的“是”),状态判别部24判定pdop是否在最小值与最大值的范围内(步骤s63)。在判定为pdop在最小值与最大值的范围内的情况下(步骤s63的“是”),输出仰角的复位值(步骤s64),并结束处理。
[0070]
在判定为pdop不在最小值与最大值的范围内的情况下(步骤s63的“否”),状态判别部24判定pdop是否大于最大值(步骤s65)。在判定为pdop不大于最大值的情况下(步骤s65的“否”),卫星接收控制部22输出pdop的最小值(步骤s66),并结束处理。在判定为pdop大于最大值的情况下(步骤s65的“是”),卫星接收控制部22对仰角进行运算(步骤s67)。然后,卫星接收控制部22输出仰角(步骤s68),并结束处理。
[0071]
图9是表示控制卫星接收控制部22的电波信号sx的接收灵敏度的处理的流程图。状态判别部24判别卫星接收控制部22是否计算出pacc3d(步骤s71)。在判定为卫星接收控
制部22未计算出pacc3d的情况下(步骤s71的“否”),卫星接收控制部22输出接收灵敏度的复位值(步骤s72),并结束处理。
[0072]
在判定为卫星接收控制部22计算出pacc3d的情况下(步骤s71的“是”),状态判别部24判定pacc3d是否在规定的最小值与最大值的范围内(步骤s73)。在判定为pacc3d不在规定的最小值与最大值的范围内的情况下(步骤s73的“否”),卫星接收控制部22输出接收灵敏度的复位值(步骤s74),并结束处理。
[0073]
在判定为pacc3d在规定的最小值与最大值的范围内的情况下(步骤s73的“是”),状态判别部24判定pacc3d是否大于规定的最大值(步骤s75)。在判定为pacc3d不大于规定的最大值的情况下(步骤s75的“否”),卫星接收控制部22输出pacc3d的最小值(步骤s76),并结束处理。在判定为pacc3d大于最大值的情况下(步骤s75的“是”),卫星接收控制部22对接收灵敏度进行运算(步骤s77)。然后,卫星接收控制部22输出接收灵敏度(步骤s78),并结束处理。
[0074]
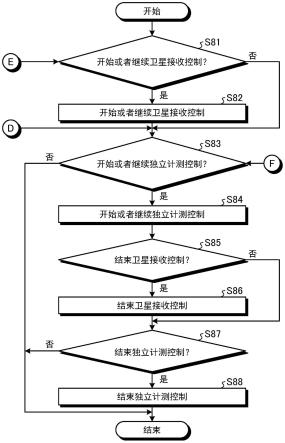
图10是表示切换判别部26的处理的流程图。切换判别部26判别是否是卫星接收控制部22开始或者继续进行卫星接收控制的状况(步骤s81)。在判别为是开始或者继续进行卫星接收控制的状况的情况下(步骤s81的“是”),卫星接收控制部22开始或者继续进行卫星接收控制(步骤s82),并前进至步骤s83。
[0075]
在判别为不是开始或者继续进行卫星接收控制的状况的情况下(步骤s81的“否”),或者在步骤s82的处理之后,切换判别部26判定是否是独立计测运算部23开始或者继续进行独立计测控制的状况(步骤s83)。在判定为不是独立计测运算部23开始或者继续进行独立计测控制的状况的情况下(步骤s83的“否”),切换判别部26结束处理。在判定为是开始或者继续进行独立计测控制的状况的情况下(步骤s83的“是”),独立计测运算部23开始或者继续进行独立计测控制(步骤s84)。
[0076]
之后,切换判别部26判定是否是卫星接收控制部22使卫星接收控制结束的状况(步骤s85)。在判定为是使卫星接收控制结束的状况的情况下(步骤s85的“是”),卫星接收控制部22使卫星接收控制结束(步骤s86)。
[0077]
切换判别部26判定是否是独立计测运算部23使独立计测控制结束的状况(步骤s87)。在判定为是使独立计测控制结束的状况的情况下(步骤s87的“是”),独立计测运算部23使独立计测控制结束(步骤s88),切换判别部26结束处理。在判定为是不使独立计测控制结束的状况的情况下(步骤s87的“否”),切换判别部26结束处理。
[0078]
图11是卫星接收控制部22选择人造卫星的状况的说明图。图11的(a)是卫星轨道信息的示意图。在图11的(a)中,在圆的中心配置铁道车辆11的天线13。在图11的(a)中,
○
标记表示人造卫星12的当前位置,通过人造卫星12的当前位置的曲线表示人造卫星12的卫星轨道信息。
[0079]
在图11的(a)的状况下,实际在铁道车辆11的天线13中能够接收的范围根据天线13的配置位置以及铁道车辆11的行驶位置而不同,例如,如图11的(b)所示,卫星接收控制部22设定接收有效区域ae以及接收无效区域an,基于铁道车辆11的行进方向dr,以相对于行进方向dr向顺时针方向以及逆时针方向分别成为例如135度的方式设定方位角。
[0080]
进而,卫星接收控制部22对于与所设定的方位角对应的接收有效区域ae,如图11的(c)所示,以相对于铁道车辆11的行进方向dr向顺时针方向以及逆时针方向分别成为90
度的方式,设定用于判定用于选择人造卫星12的人造卫星位置的卫星配置判定区域ad,并继续进行确定下次应选择的人造卫星的处理。
[0081]
图12是控制卫星接收控制部22的仰角的状况的说明图。如图12的(a)所示,卫星接收控制部22控制仰角el,以便将通过上述人造卫星选择处理选择出的、在铁道车辆11的位置计测中有效的人造卫星12e全部包含在内,并且不包含在铁道车辆11的位置计测中无效的人造卫星12n(=人造卫星12n21以及人造卫星12n22)。
[0082]
其结果,有效的仰角的范围ael成为图12的(b)所示那样,因此卫星接收控制部22进一步如图11的(c)所示那样进行确定铁道车辆11的接收有效区域ae的处理。其结果,能够将铁道车辆11的位置的计测精度维持在所希望的值以上。
[0083]
即,卫星接收控制部22设定上述人造卫星相对于车辆的仰角的范围,在所设定的仰角的范围内设定人造卫星相对于车辆所成的方位角的范围,将仰角的范围和方位角的范围中所包含的区域划分成多个区域。
[0084]
在该情况下,卫星接收控制部22根据方位角在一定时间(例如,1秒期间)内定期地取得铁道车辆11的行进方向dr,并取得平均化后的方位角作为行进方向角。也可以根据卫星轨道信息来选定存在于该行进方向角的人造卫星12。
[0085]
进而,在行进方向dr的方位角由于转弯、路径变更等而较大地改变的情况下(例如,10
°
),卫星接收控制部22也可以随时取得行进方向角,并根据卫星轨道信息来选定人造卫星12。由此,卫星接收控制部22能够仅选定能够提高对铁道车辆11的位置进行检测的精度的电波信号sx。
[0086]
图13是表示卫星接收控制部22对区域内所配置的人造卫星12进行选择的状况的说明图。在包含于有效的仰角的范围ael中且由粗线包围的区域即区域e中配置有5个人造卫星12。卫星接收控制部22例如根据区域e内部的人造卫星12的配置状况,将这5个人造卫星12区分为两个有效的人造卫星12e和3个不用于位置计测的人造卫星12l。即,卫星接收控制部22从多个区域中所配置的一个或者多个人造卫星12中选择出用于卫星接收控制的人造卫星12。
[0087]
此时,卫星接收控制部22将5个人造卫星12中的两个选择作为有效的人造卫星12e,以使有效的人造卫星12e在区域e内的配置变得均匀。此外,例如,卫星接收控制部22将区域e内各自的距离较近或者重叠那样的人造卫星12选择作为不用于位置计测的人造卫星12l。卫星接收控制部22在其他区域中也根据人造卫星12的配置状况进行同样的处理。另外,在人造卫星12中包含静止卫星的情况下,卫星接收控制部22也可以优先选择静止卫星。
[0088]
图14是表示卫星接收控制部22基于区域的优先顺序选择人造卫星12的状况的说明图。卫星接收控制部22基于仰角、方位角、接收灵敏度对各个相应区域设定优先顺序(例如,图14所示那样的1~24的顺序)。例如,卫星接收控制部22优先选择配置在优先顺序较高的区域中的人造卫星12。即,卫星接收控制部22基于规定的优先顺序选择多个区域。当在相应区域中包含静止卫星的情况下,卫星接收控制部22也可以优先选择包含静止卫星的区域。另外,在图13和图14中,仰角按照15
°
或者30
°
的刻度,方位角以30
°
或者45
°
为基本,但并不限定于此处所示的角度。
[0089]
图15是表示在卫星接收控制的执行中进行是否执行独立计测控制的判断的状况的流程图。首先,卫星接收控制部22取得在当前的铁道车辆11的位置的计测中使用的卫星
的数量(步骤s91)。接着,状态判别部24判定满足条件的数量是否为规定的阈值以上(步骤s92)。在判定为不为阈值以上的情况下(步骤s92的“否”),状态判别部24判定卫星接收控制部22在规定时间前(例如100ms前)是否进行了卫星接收控制(步骤s93)。
[0090]
在判定为在规定时间前进行了卫星接收控制的情况下(步骤s93的“是”),前进至图10的d,切换判别部26继续进行处理。在判定为在规定时间前未进行卫星接收控制的情况下(步骤s93的“否”),前进至图10的e,切换判别部26继续进行处理。
[0091]
在步骤s92中,在判定为在阈值以上的情况下(步骤s92的“是”),状态判别部24判定是否连续两次为阈值以上(步骤s94)。在判定为连续两次为阈值以上的情况下(步骤s94的“是”),前进至图10的f,切换判别部26继续进行处理。在判定为并非连续两次为阈值以上的情况下(步骤s94的“否”),前进至图10的d,切换判别部26继续进行处理。
[0092]
图16是表示卫星定位控制中的定位点的误差的概念图。在图16中,将如下范围表示为允许误差范围:穿过铁道车辆11的重心(重心附近)且沿着铁道车辆11的行进方向dr延伸的中心轴,与位于穿过铁道车辆11的重心且以与中心轴垂直的垂线上的点即中心点为中心的圆弧上的
□
标记之间的范围。然后,在图16中,〇标记位于允许误差范围的范围内,
×
标记位于允许误差范围外。
[0093]
例如,在卫星定位控制的执行中,在状态判别部24判别为在规定阈值以上的次数、定位点包含在允许误差范围内的情况下,切换判别部26对于卫星接收控制部22判别为是进行卫星定位控制的状况,卫星接收控制部22继续进行卫星定位控制。在卫星定位控制的执行中,在状态判别部24判别为在规定阈值以上的次数、定位点未包含在允许误差范围内的情况下,切换判别部26判别为是进行独立计测控制的状况,独立计测运算部23开始进行独立计测控制。
[0094]
图17是表示卫星接收控制部22中的卫星选择的处理的流程图。卫星接收控制部22取得作为目标的仰角的控制值以及接收灵敏度的控制值((步骤s101)。接着,卫星接收控制部22取得各人造卫星12的方位、仰角以及接收灵敏度(步骤s102)。然后,卫星接收控制部22对区域内的所有人造卫星12的数量进行计数(步骤s103)。之后,卫星接收控制部22按照所分割的每个区域,对阈值以上的接收灵敏度的人造卫星12的数量进行计数(步骤s104)。
[0095]
此处,卫星接收控制部22判定区域内的人造卫星的配置是否产生了偏心(步骤s105)。在未产生偏心的情况下,(步骤s105的“否”),返回到步骤s101并反复进行处理。在产生偏心的情况下,(步骤s105的“是”),卫星接收控制部22取得所有人造卫星12的接收灵敏度(步骤s106)。
[0096]
接着,卫星接收控制部22按照每个仰角取得阈值以上的接收灵敏度的卫星的数量(步骤s107)。接着,卫星接收控制部22取得阈值以上的接收灵敏度的人造卫星12的仰角(步骤s108)。接着,卫星接收控制部22根据所取得的仰角计算出最低仰角(步骤s109),并将该值作为仰角控制值(步骤s110)。
[0097]
卫星接收控制部22在所分割的各个区域内存在两颗以上的人造卫星12的情况下,选择一颗接收状况(接收灵敏度)最好的人造卫星12(步骤s111)。卫星接收控制部22选择其中接收灵敏度的偏差为阈值以上的有效的人造卫星12e(步骤s112)。然后,卫星接收控制部22选择该有效的人造卫星12e中的用于位置信息的计算的人造卫星12(步骤s113)。
[0098]
图18是表示卫星接收控制中的推定距离误差的概念图。如图18所示,向量l0是计
测速度乘以计测周期t而得到的表示铁道车辆的移动距离的向量。另一方面,向量l1是表示每单位时间的铁道车辆11的实际移动距离的向量。向量l1与向量l0之差的绝对值被称作推定距离误差。切换判别部26计算向量l0、向量l1以及推定距离误差。
[0099]
图19是表示卫星接收控制的处理流程的流程图(其1)。状态判别部24判定定位信号运算部21是否取得了例如1秒量的电波信号sx(步骤s121)。在判定为未取得1秒量的电波信号sx的情况下(步骤s121的“否”),反复进行处理。在判定为取得了1秒量的电波信号sx的情况下(步骤s121的“是”),根据当前的坐标与0.1秒前的坐标计算出向量长度(步骤s122)。
[0100]
接着,卫星接收控制部22从卫星定位数据组dg中取得铁道车辆11的速度(步骤s123)。然后,卫星接收控制部22根据铁道车辆11的速度和计测间隔(例如0.1秒)计算出与铁道车辆11的移动距离相当的向量的长度(步骤s124),并计算出两个向量之差(步骤s125)。该向量之差相当于推定距离误差。
[0101]
此处,状态判别部24判定推定距离误差是否大于规定的阈值(步骤s126)。即,状态判别部24使用推定距离误差来判别是否进行卫星接收控制和独立计测控制中的至少任一个。在推定距离误差不大于阈值的情况下(步骤s126的“否”),返回到步骤s121并反复进行处理。在推定距离误差大于阈值的情况下(步骤s126的“是”),卫星接收控制部22取得推定位置误差(步骤s127)。
[0102]
此处,状态判别部24判定推定位置误差是否大于规定的阈值(步骤s128)。即,状态判别部24计算出与3轴方向的车辆位置的计测精度相关的推定位置误差,并基于推定位置误差来判别是否进行卫星接收控制和独立计测控制中的至少任一个。在不大于阈值的情况下(步骤s128的“否”),返回到步骤s121并反复进行处理。在大于阈值的情况下(步骤s128的“是”),卫星接收控制部22取得推定位置误差的平均值(步骤s129)。
[0103]
然后,卫星接收控制部22使用推定位置误差的平均值来计算推定位置误差的变化率(步骤s130)。接着,状态判别部24判定推定位置误差的平均值是否大于规定的阈值(步骤s131)。即,状态判别部24计算出推定位置误差的变化量,并基于该变化量来判别是否进行卫星接收控制和独立计测控制中的至少任一个。在不大于阈值的情况下(步骤s131的“否”),返回到步骤s121并反复进行处理。在大于阈值的情况下(步骤s131的“是”),前进至图10的e,切换判别部26继续进行处理。
[0104]
图20是表示卫星接收控制的处理流程的流程图(其2)。状态判别部24判定定位信号运算部21是否取得了例如0.02秒量的电波信号sx(步骤s141)。在判定为未取得0.02秒量的情况下(步骤s141的“否”),反复进行处理。在判定为取得了0.02秒量的情况下(步骤s141的“是”),卫星接收控制部22根据当前的坐标和0.02秒前的坐标计算向量内积(步骤s142)。
[0105]
接着,卫星接收控制部22取得铁道车辆11的行进方向dr的方位角(步骤s143)。然后,卫星接收控制部22根据当前和0.02秒前的方位角来计算出铁道车辆11当前行进的线路的类别(直线、曲线等)(步骤s144),并基于其结果来计算铁道车辆11的速度(步骤s145)。接着,卫星接收控制部22根据铁道车辆11的速度和线路的类别,选择存储装置27所存储的规定的阈值(步骤s146)。然后,将铁道车辆11的行进方向dr的方位角和该向量内积之差、与规定的阈值进行比较(步骤s147)。
[0106]
此处,状态判别部24基于规定的阈值来判定两者之差是否显著大(步骤s148)。在判定为两者之差不显著大的情况下(步骤s148的“否”),返回到步骤s141并反复进行处理。
在判定为两者之差显著大的情况下(步骤s的“是”),卫星接收控制部22对该情况进行计数(步骤s149)。
[0107]
然后,状态判别部24例如判定是否连续五次判定为误差显著大(步骤s150)。在未连续五次判定为两者之差显著大的情况下(步骤s150的“否”),返回到步骤s141并反复进行处理。在连续五次判定为两者之差显著大的情况下(步骤s150的“是”),前进至图10的e,切换判别部26继续进行处理。
[0108]
图21是表示地图连动控制的执行状况的说明图。在图21中设置有实际的线路r1和地图上的线路r2。然后,实际的线路r1上所示的两个〇标记之间的空间以及地图上的线路r2上所示的两个
△
标记之间的空间,例如表示隧道、车站等无法进行卫星接收控制的区域。两个
△
标记存储于地图db29。在地图上的线路r2中,
□
标记位于两个
△
标记各自的前后100m。两个
□
标记也同样存储于地图db29。即,地图db29存储包含车辆所通过的通过区域和特定位置的地图信息。
[0109]
例如,卫星接收控制部22在计测出铁道车辆11正在实际的线路r1上的〇标记前后100m地点行驶的情况下,判断为铁道车辆在地图上对应的
□
标记的位置处行驶。
[0110]
此处,切换判别部26基于铁道车辆11的行驶状态(行驶速度、加速度等)、地图db29中的
△
标记、
□
标记的位置、通过区域(是否是能够进行卫星接收控制的区域)等,判别进行卫星接收控制和独立计测控制中的至少哪一个。然后,基于切换判别部26的判别结果,卫星接收控制部22进行卫星接收控制或者同时进行地图连动控制,独立计测运算部23进行独立计测控制或者同时进行地图连动控制。
[0111]
以上说明的实施方式的定位装置10具备卫星接收控制部22、独立计测运算部23以及切换判别部26。卫星接收控制部22进行与从人造卫星12发送且用于计测铁道车辆11的位置的信息的接收相关的卫星接收控制。独立计测运算部23进行与从传感器发送且用于计测铁道车辆11的位置的信息的接收相关的独立计测控制。切换判别部26根据上述信息的接收状况,判别进行卫星接收控制和独立计测控制中的至少哪一个。由此,例如定位装置10能够在铁道车辆11的行驶中从卫星接收控制切换成独立计测控制,或者同时执行卫星接收控制和独立计测控制,能够消除多路径等的问题。此外,在隧道、桥上车站等的高架下、地下区间等,能够提高铁道车辆11的行驶位置的计测精度。
[0112]
卫星接收控制部22设定人造卫星12相对于铁道车辆11的仰角的范围。卫星接收控制部22在所设定的仰角的范围内,设定人造卫星12相对于铁道车辆11所成的方位角的范围。然后,卫星接收控制部22将仰角的范围和方位角的范围中所包含的区域划分为多个区域,并从多个区域中所配置的一个或者多个人造卫星12中选择用于卫星接收控制的人造卫星12。由此,卫星接收控制部22能够根据仰角、方位角、电波信号sx的接收状况来选择任意的人造卫星12,能够进一步提高铁道车辆11的位置的计测精度。此外,当在相同区域内存在多个人造卫星12的情况下,通过以在该区域内存在一个或者两个人造卫星的方式选择人造卫星12,由此能够降低该区域内的人造卫星12的配置偏差,能够使人造卫星12的配置均匀。
[0113]
卫星接收控制部22设定人造卫星12相对于铁道车辆11的仰角的范围,在所设定的仰角的范围中设定人造卫星12相对于铁道车辆11所成的方位角的范围,将仰角的范围和方位角的范围中所包含的区域划分为多个区域,基于规定的优先顺序选择多个区域。由此,卫星接收控制部22能够选择电波信号sx的接收状况良好、优先顺序较高的人造卫星12,能够
进一步提高铁道车辆11的位置的计测精度。
[0114]
状态判别部24计算向量l0、向量l1以及推定距离误差。向量l0与基于铁道车辆11的速度的铁道车辆11在规定时间内的移动量对应。向量l1与铁道车辆11在规定时间内的移动量对应。推定距离误差基于向量l0和向量l1。状态判别部24使用推定距离误差来判别进行卫星接收控制和独立计测控制中的至少哪一个。此外,状态判别部24计算与3轴方向的铁道车辆11的位置的计测精度相关的推定位置误差,并基于推定位置误差来判别进行卫星接收控制和独立计测控制中的至少哪一个。进而,状态判别部24计算推定位置误差的变化量,并基于该变化量来判别进行卫星接收控制和独立计测控制中的至少哪一个。由此,状态判别部24能够得到更多用于切换卫星接收控制与独立计测控制的判断指标,例如切换判别部26能够更精密地切换卫星接收控制与独立计测控制。
[0115]
定位装置10还具备地图db29,该地图db29存储包含铁道车辆11所通过的通过区域和特定位置的地图信息(地图上的线路r2、隧道、高架下等、它们的入口和出口的地点、该入口和出口各自前后的规定地点等信息)。切换判别部26基于铁道车辆11的状态、通过区域以及特定位置,判别进行卫星接收控制和独立计测控制中的至少哪一个。由此,例如从铁道车辆11进入隧道、高架下等电波信号sx的接收状况较差的区域之前的规定地点起,切换判别部26开始判别是否从卫星接收控制切换成独立计测控制,由此能够实现切换定时的最佳化。此外,通过参照地图db29,切换判别部26能够消除与该切换相伴随的时滞,能够提高卫星接收控制部22和独立计测运算部23的铁道车辆11的计测精度。
[0116]
状态判别部24判定是铁道车辆11停止的停止状态和铁道车辆11正在行驶的行驶状态中的哪一个。由此,状态判别部24在铁道车辆11的停止状态下抑制铁道车辆11的位置的计测结果波动。
[0117]
对本发明的几个实施方式进行了说明,但这些实施方式是作为例子而提示的,并不意图对发明的范围进行限定。这些实施方式能够以其他各种方式加以实施,在不脱离发明的主旨的范围内能够进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围及主旨中,并且包含于专利请求范围所记载的发明和与其等同的范围中。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1