基于多目测距的柔性三维织造装备导向棒安装检测方法
1.本发明属于三维织造导向棒安装检测技术领域,具体地涉及一种基于多目测距的柔性三维织造装备导向棒安装检测方法。
背景技术:
2.三维织造复合材料是高技术领域的一种新型的先进复合材料,纤维束在材料内部相互交错,构成空间互锁网状结构,形成一个整体结构,具有优良的抗冲击韧性、抗疲劳性和耐烧蚀性,可制造高温功能结构材料,也可以用于风力发电机叶片等结构中的梁、框、筋、轴、杆等部件。
3.目前对柔性三维织造装备的研究都是基于人眼监测导向棒的安装,任务繁重、耗时长、效率低且识别精度有限,该方法难以确保导向棒安装成功的准确性,导致后续预制体在织造过程中产生变形和纤维束损伤,最终难以保证复合材料的致密成型和力学性能。
技术实现要素:
4.针对现有技术中存在的问题,本发明提供了一种基于多目测距的柔性三维织造装备导向棒安装检测方法,使用图像处理的方法用机器完成这一繁琐任务,提高了监测导向棒安装的精度,降低人眼负担,节约检测时间,该柔性三维织造装备导向棒安装检测方法是一种高效、智能、便捷的检测方法。
5.为实现上述技术目的,本发明采用如下技术方案:一种基于多目测距的柔性三维织造装备导向棒安装检测方法,具体包括以下步骤:
6.(1)移动图像采集系统采集导向棒安装区域的图像,通过采集的相邻两帧的图像获取测量距离;
7.(2)构建遗传优化算法的目标函数,将步骤(1)获取的测量距离进行分类,输入遗传优化算法中进行优化,输出导向棒安装高度;
8.(3)若导向棒安装高度在允许的安装误差范围内,若在安装误差范围内,表示安装正确;否则,未安装成功;
9.(4)重复步骤(1)-(3),直至完成对导向棒区域中所有导向棒安装位置的检测。
10.进一步地,在图像采集系统采集导向棒安装区域的图像前,先对图像采集系统进行高精度标定。
11.进一步地,步骤(1)中图像采集系统包括:支撑臂、直线模组、多视觉传感器,所述直线模组的两端分别连接一个支撑臂,支撑臂设置于柔性三维织造装备的模板上,所述多视觉传感器设置于直线模组下方,所述多视觉传感器由若干高精度工业相机组成,高精度工业相机均匀分布在半径为r的圆周上,所述高精度工业相机的视野对准导向棒安装区域。
12.进一步地,相邻两个高精度工业相机之间的观测视野的重叠区域大于60%。
13.进一步地,步骤(1)包括如下子步骤:
14.(1.1)移动图像采集系统在导向棒安装区域内运动,拍摄导向棒安装区域上导向
棒安装目标点的图像帧,标定图像帧上导向棒安装目标点的坐标,计算相邻图像帧上导向棒安装目标点的视差值其中,x
l
和xr分别表示相邻图像帧上导向棒安装目标点的横坐标,y
l
和yr分别表示相邻图像帧上导向棒安装目标点的纵坐标;
15.(1.2)根据相似三角形原则,有求取导向棒安装目标点到第i个高精度工业相机与第j个高精度工业相机中心的距离d
ij
,其中,b
ij
表示第i个高精度工业相机与第j个高精度工业相机之间的距离,f表示高精度工业相机的焦距;
16.(1.3)根据步骤(1.2)求得的d
ij
,计算第i个高精度工业相机与第j个高精度工业相机的测量物距
17.(1.4)重复步骤(1.2)-(1.3),得出第i个高精度工业相机与其余所有高精度工业相机的测量物距,计算出第i个高精度工业相机与其余所有高精度工业相机的测量距离其中,n表示高精度工业相机的总数量,θ
ij
表示第i个高精度工业相机与第j个高精度工业相机测量距离的权重系数;
18.(1.5)遍历每一个高精度工业相机,得出每一个高精度工业相机与其余所有高精度工业相机的测量距离。
19.进一步地,步骤(2)包括如下子步骤:
20.(2.1)通过偏最小二乘法对步骤(1)获取的测量距离进行分类,构建遗传优化算法的目标函数f(x)=-x2+2*a*x,其中,x为测量距离,a为测量距离的平均值;设置种群大小和进化代数,将分类的测量距离输入遗传优化算法中进行优化;
21.(2.2)进行交叉和变异操作,设置每个测量距离被选择的概率其中,f(di)表示测量距离的目标函数值,将每个测量距离两两交叉产生新测量距离,设置交叉概率pc为0.7;对于任意两个测量距离,产生一个随机数α∈(0,1),杂交后的测量距离分别为y1=αx1+(1-α)x2,y2=(1-α)x1+αx2,其中,x1和x2分别为任意的两个测量距离,y1和y2分别为杂交后的测量距离;设置测量距离的变异概率pm为0.01,若测量距离产生变异,变异后的测量距离为y=di+0.5*l或者y=d
i-0.5*l,其中,l为测量距离中极大值与极小值的差值;
22.(2.3)将测量距离、杂交后的测量距离、变异后的测量距离输入目标函数中,计算目标函数值,重复步骤(2.2),直至遗传优化算法达到设置的进化代数,将最大的目标函数值作为导向棒的安装高度。
23.进一步地,步骤(2.1)中遗传优化算法的参数设置如下:种群大小设置为高精度工业相机的总数量,进化代数为200。
24.与现有技术相比,本发明具有如下有益效果:本发明基于多目测距的柔性三维织造装备导向棒安装检测方法通过相邻图像帧计算出导向棒安装目标点的视差值,根据相似三角形原则与权重系数,得出高精度工业相机的测量距离,具有精度高、误差小的特点;本发明通过遗传优化算法能够有效地减少导向棒测量距离的误差,通过交叉、变异进行全局
优化,获得实际测量距离,实现了高准确率、高效率和计算速度快的检测过程。本发明基于多目测距的柔性三维织造装备导向棒安装检测方法降低了人为主观性的干扰,提升了预制体生产流程中的智能化测量水平,降低了质检人员的工作强度,实现了高精度检测并实时反馈,可以有效减少预制体织造过程中的变形和纤维束损伤,最终保证复合材料的致密成型和力学性能。
附图说明
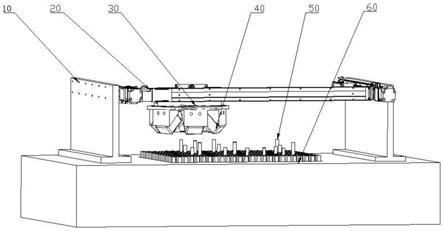
25.图1是本发明中图像采集系统的结构示意图;
26.图2是本发明中多视觉传感器的分布示意图;
27.图3是本发明中图像测距过程几何示意图;
28.图4是本发明中基于遗传优化算法测量距离的流程图;
29.图5是本发明基于多目测距的柔性三维织造装备导向棒安装检测方法的导向棒安装情况检测结果图。
具体实施方式
30.下面将结合附图,对本发明的技术方案进行清楚、完整地描述。除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下实施方式并不代表与本发明相一致的所有实施方式。
31.本发明公开了一种基于多目测距的柔性三维织造装备导向棒安装检测方法,具体包括如下步骤:
32.(1)在图像采集系统采集导向棒安装区域的图像前,为确定空间物体表面某点的三维几何位置与其在图像中对应点之间的相互关系,必须建立相机成像的几何模型,对图像采集系统进行高精度标定,获得图像采集系统的标定参数、矫正图像,保证图像采集系统工作的准确性,并获得图像采集系统的基线距。然后,移动图像采集系统采集导向棒安装区域的图像,通过采集的相邻两帧的图像获取测量距离。
33.如图1为本发明中图像采集系统的结构示意图,该图像采集系统包括:支撑臂10、直线模组20、多视觉传感器30,直线模组20的两端分别连接一个支撑臂10,支撑臂10设置于柔性三维织造装备的模板60上,多视觉传感器30设置于直线模组20下方,如图2,多视觉传感器30由若干高精度工业相机40组成,高精度工业相机40均匀分布在半径为r的圆周上,高精度工业相机40的视野对准导向棒安装区域50,相邻两个高精度工业相机40之间的观测视野的重叠区域大于60%,从而保证高精度工业相机40的视野中都有共同的一个目标点。
34.具体地,步骤(1)包括如下子步骤:
35.(1.1)移动图像采集系统在导向棒安装区域内运动,拍摄导向棒安装区域上导向棒安装目标点的图像帧,标定图像帧上导向棒安装目标点的坐标,计算相邻图像帧上导向棒安装目标点的视差值其中,x
l
和xr分别表示相邻图像帧上导向棒安装目标点的横坐标,y
l
和yr分别表示相邻图像帧上导向棒安装目标点的纵坐标;
36.(1.2)如图3,根据相似三角形原则,有求取导向棒安装目标点到第i个高精度工业相机与第j个高精度工业相机中心的距离d
ij
,其中,b
ij
表示第i个高精度工业相机与第j个高精度工业相机之间的距离,f表示高精度工业相机的焦距;通过对相邻图像帧视差的计算,直接对目标点进行距离测量获得距离信息,准确率高;
37.(1.3)根据步骤(1.2)求得的d
ij
,计算第i个高精度工业相机与第j个高精度工业相机的测量物距
38.(1.4)重复步骤(1.2)-(1.3),得出第i个高精度工业相机与其余所有高精度工业相机的测量物距,计算出第i个高精度工业相机与其余所有高精度工业相机的测量距离其中,n表示高精度工业相机的总数量,θ
ij
表示第i个高精度工业相机与第j个高精度工业相机测量距离的权重系数,当b
ij
越大时,精度越高,因此对于b
ij
较大的两个高精度工业相机对应的测量距离,需要设置较大的权重,以提高计算的精度;
39.(1.5)遍历每一个高精度工业相机,得出每一个高精度工业相机与其余所有高精度工业相机的测量距离。
40.(2)构建遗传优化算法的目标函数,将步骤(1)获取的测量距离进行分类,输入遗传优化算法中进行优化,输出导向棒安装高度;如图4,步骤(2)包括如下子步骤:
41.(2.1)通过偏最小二乘法对步骤(1)获取的测量距离进行分类,以排除误差较大的测量距离数据,构建遗传优化算法的目标函数kx)=-x2+2*a*x,其中,x为测量距离,a为测量距离的平均值;设置种群大小和进化代数,种群大小设置为高精度工业相机的总数量,进化代数为200,将分类的测量距离输入遗传优化算法中进行优化;
42.(2.2)进行交叉和变异操作,从而产生更多的测量距离数据,防止遗传优化算法进入局部最优。设置每个测量距离被选择的概率其中,f(di)表示测量距离的目标函数值,将每个测量距离两两交叉产生新测量距离,设置交叉概率pc为0.7;对于任意两个测量距离,产生一个随机数α∈(0,1),杂交后的测量距离分别为yl=αx1+(1-α)x2,y2=(1-α》xl+αx2,其中,x1和x2分别为任意的两个测量距离,y1和y2分别为杂交后的测量距离;设置测量距离的变异概率pm为0.01,若测量距离产生变异,变异后的测量距离为y=di+0.5*l或者y=d
i-0.5*l,其中,l为测量距离中极大值与极小值的差值;
43.(2.3)将测量距离、杂交后的测量距离、变异后的测量距离输入目标函数中,计算目标函数值,重复步骤(2.2),直至遗传优化算法达到设置的进化代数,将最大的目标函数值作为导向棒的安装高度。
44.(3)若导向棒安装高度在允许的安装误差范围内,若在安装误差范围内,表示安装正确;否则,未安装成功;
45.(4)重复步骤(1)-(3),直至完成对导向棒区域中所有导向棒安装位置的检测。
46.如图5为采用本发明方法进行导向棒安装情况检测结果图,其中,导向棒未安装成功的均被标记,通过本发明的方法可以直观地看出未安装成功的导向棒,实现了高准确率、高效率的检测。
47.以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施方
式,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1