一种基于神经网络的实波束扫描雷达角超分辨方法
1.本发明属于雷达成像领域,特别涉及一种实波束扫描雷达的角超分辨技术。
背景技术:
2.与光学传感相比,雷达不受天气和光照的影响,能够穿透薄雾和云层,具有全天时,全天候的优点,在导弹制导、对地观测、灾害监控等军用,民用领域的应用越来越广泛。但是,由于实波束扫描雷达方位分辨率受制于波束宽度和作用距离,方位向分辨率不可避免得比较差。因此,如何提高实波束扫描雷达的方位向分辨率是雷达领域的研究热点。
3.文献“唐琳,焦淑红,齐欢,吴如煊.一种单脉冲雷达多通道l1正则化波束锐化方法[j].电子与信息学报,2014,36(9):2201-2206.”利用稀疏先验信息,对反卷积成像进行正则化,实现了一定程度上的方位超分辨,但是对假设先验信息要求很强,当目标与噪声的分布与假设不一致时,超分辨性能会恶化;文献“李萌,刘畅.基于特征复用的膨胀-残差网络的sar图像超分辨重建[j].雷达学报,2020,9(2):363
–
372.doi:10.12000/jr19110.”针对sar图像的超分辨,提出了膨胀-残差结构限制特征图分辨率的损失,并且将不同的特征图之间进行级联,实现不同层级的特征最大化利用,提高了sar图像的分辨率。但该文献的网络学习数据为经过下采样后的图像,因而只能实现图像的增强。文献“tao,xin,et al.scale-recurrent network for deep image deblurring.in eccv.2018”提出了多尺度循环神经网络对光学图像解卷积的算法,利用编码模块的深层特征提取能力和解码模块的细节恢复能力,实现了光学图像的去模糊,但是在残差块的特征传播过程中没有考虑各个层级的权重信息,导致结果会丢失一定的细节信息。
技术实现要素:
[0004]
为解决上述技术问题,本发明提出一种基于神经网络的实波束扫描雷达角超分辨方法,通过构建了基于自适应残差块的循环多尺度神经网络,并通过训练与测试实现了实波束雷达方位向的超分辨。
[0005]
本发明采用的技术方案为:一种基于神经网络的实波束扫描雷达角超分辨方法,包括:
[0006]
s1、构造训练图像-实波束图像对;
[0007]
s2、将步骤s1的训练图像-实波束图像对剪裁为细粒图像;
[0008]
s3、通过基于对称的编码-解码结构框架的神经网络得到实波束图像的超分辨结果;具体的:
[0009]
所述神经网络包括下采样模块、三组对称的编码-解码结构;所述下采样模块将输入的细粒度图像下采样为中粒度图像和粗粒度图像;
[0010]
粗粒度图像作为第一组对称的编码-解码结构的输入;
[0011]
将第一组对称的编码-解码结构的输出提升图像点数至与中粒度图像一样,并将图像点数提升后的第一组对称的编码-解码结构的输出与中粒度图像一起作为第二组对称
的编码-解码结构的输入;
[0012]
将第二组对称的编码-解码结构的输出结果提升图像点数至与细粒度图像一样,并图像点数提升后的第二组对称的编码-解码结构的输出与细粒度图像一起作为第三组对称的编码-解码结构的输入;第三组对称的编码-解码结构的输出为图像超分辨结果。
[0013]
步骤s1具体为:将真实雷达场景图像作为训练图像,采用天线方位图函数对训练图像进行方位向的卷积,构造实波束图像;根据训练图像与构造的实波束图像,得到训练图像-实波束图像对。
[0014]
所述三组对称的编码-解码结构中均包括编码模块与解码模块,且各自的编码模块、解码模块的结构相同。
[0015]
所述编码模块包括一层卷积层与三个串联的结构相同的自适应残差模块。
[0016]
所述解码模块包括一层反卷积层以及与编码模块维度对应的三个串联的结构相同的自适应残差模块。
[0017]
所述自适应残差模块对应的表达式为:
[0018]
y=a
·
x+b
·
f(x)
[0019]
其中,x是输入特征,y是输出特征,f()表示残差块。
[0020]
每组对称的编码-解码结构中编码模块与解码模块通过长短期记忆模块连接。
[0021]
本发明的有益效果:本发明基于循环多尺度网络架构,采用对称编码-解码框架实现不同尺度模块的特征融合,并构造自适应残差模块的方式,实现不同层次特征的自适应融合,重建出具有丰富细节信息的高分辨率图像。相比于其他方法,本发明的方法能有效地融合不同层次的特征,增强了细节表征,提高了超分辨效果。
附图说明
[0022]
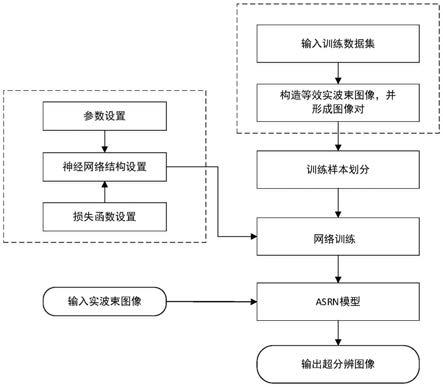
图1本发明方法的方法流程图;
[0023]
图2本发明设计的神经网络结构图;
[0024]
其中,(a)为本发明采用的网络结构,(b)为自适应残差块的结构;
[0025]
图3位本发明实施例根据表1参数模拟扫描雷达实波束图像的结果;
[0026]
图4为本发明实施例提供的实波束扫描雷达图像;
[0027]
图5采用本发明方法进行超分辨处理所得结果。
具体实施方式
[0028]
本发明主要采用仿真实验的方法进行验证,所有步骤、结论都在windows10操作系统平台上通过pycharm(python编译平台)验证正确。为便于本领域人员理解本发明的技术内容,下面结合附图对本发明内容进一步阐述。
[0029]
如图1所示,本发明的实现过程为:
[0030]
1.数据预处理
[0031]
在训练前对输入的训练集数据进行预处理,具体过程是,将3000张512
×
512真实雷达图像作为目标场景,再用参数如表1的天线方位图函数对目标场景进行方位向的卷积,构造3000张等效于实波束图像,并形成3000对训练图像-实波束图像对。
[0032]
表1实波束扫描雷达参数
[0033]
参数符号数值载波频率f010ghz发射信号带宽br50mhz脉冲重复频率prf3000hz天线波束3db宽度θ
3db2°
扫描速度ω120
°
/s扫描范围θ
min
~θ
max-15
°
~15
°
[0034]
2.训练样本划分
[0035]
将训练集中的每一对图像对(512
×
512)随机剪裁为256
×
256的图像块;并将样本块随机打乱顺序,同时保持训练图像-实波束图像的对应关系不变,以备构造网络训练。按照预先设定的batch size=10,即每批次输入10对训练图像块到构造网络训练。
[0036]
3.网络结构设置
[0037]
本发明的网络模型根据由粗粒到细粒的思想,采用多尺度输入的形式,将输入的细粒图像(256
×
256)下采样为中粒图像(128
×
128)和粗粒图像(64
×
64),分别作为网络的3种尺度输入。为了将不同尺度卷积模块提取的特征融合,整个网络采用对称的编码-解码结构框架,同时,在编码-解码框架内部通过增加权重学习模块的方法修改残差模块,构造自适应残差模块,以此替换对称编码-解码网络中的卷积模块,用于自适应地融合不同层次的特性。
[0038]
本发明采用的对称编码-解码网络框架如图2(a)所示,分为粗、中、细3个尺度。每个尺度都具备相同的对称编码-解码网络框架,只是对应的输入图像的尺度不同。具体的:
[0039]
粗粒尺度图像i1(64
×
64)输入到该尺度对应的对称编码-解码网络,得到网络处理的输出图像o1(64
×
64)。
[0040]
对图像o1通过模块up进行双线性插值提升图像点数128
×
128和中粒尺度图像i2(128
×
128)一起输入到中粒尺度对应的对称编码-解码网络,得到网络处理的输出图像o2(128
×
128)。
[0041]
对图像o2通过模块up进行双线性插值提升图像点数为256
×
256和细粒尺度图像i3(256
×
256)一起输入到中粒尺度对应的对称编码-解码网络,得到网络处理的输出图像o3(256
×
256)。其中细粒尺度对称编码-解码网络的输出图像o3就是对图像i3的方位向超分辨结果。
[0042]
对于每个尺度的对称编码-解码网络,其编码部分都是通过3个编码模块(分别为编码器1、编码器2、编码器3)串联而成的。其中,编码模块是由一层卷积层(5
×
5)和3个结构相同的自适应残差模块(维度分别为32,64,128)串联而成。其解码部分是通过3个解码模块(分别为解码器1、解码器2、解码器3)串联而成的。其中,解码模块是由一层反卷积层(5
×
5)和3个与编码模块维度相对应的自适应残差模块(维度分别为128,64,32)串联而成。连接编码部分和解码部分的模块是长短期记忆(lstm)模块,用于在编码-解码网络中解决网络中的梯度消失的问题。
[0043]
自适应残差块的函数可以用下面的方程表示:
[0044]
y=a
·
x+b
·
f(x)
ꢀꢀꢀ
(1)
[0045]
其中,x是输入特征,y是输出特征,f()表示残差块。由公式(1)可见,x与f(x)的权
值都是不是固定的。其中,它们的权值是通过与一个学习模块得到的。自适应残差块的结构如图2(b)所示,输入特征x通过5
×
5的卷积层(conv)后通过激活函数(relu)再输入到一层5
×
5的卷积层(conv),得到f(x),x与f(x)串联后通过1
×
1的卷积层学习权重参数,再分别与输入特征x和残差块输出f(x)对应相乘相加,最终得到自适应残差模块的输出y。
[0046]
4.网络训练
[0047]
4.1构造损失函数
[0048]
本发明是要构建一个实波束雷达图像到训练图像之间的映射,因此目的在于最小化本网络输出图像y与原高分辨率图像r之间的差异,这就是本发明中构造loss函数的依据,这里使用均方误差mse进行loss函数设置;
[0049][0050]
其中,n*是训练图像的个数,ii是训练图像,i
i*
是网络预测的结果。
[0051]
4.2参数设置
[0052]
初始学习速率设定为ε=0.0001,每2000步进行指数衰减epochnum=2000,学习率衰减倍数设定为εd=0.3,当学习速率衰减到终止学习速率εe=0.000001时训练结束。公式如下:
[0053]
ε=0.95
epoch
numεd[0054]
在此基础上,采用adam优化算法进行loss函数的优化,其中adam优化算法的参数如下学习率learning_rate=0.001,衰减速度beta1=0.9,衰减速度beta2=0.999,epsilon=1e-8(epsilon用于加在分母上防止除0的情况发生),随着训练进行,loss不断减小,当学习速率衰减到设定的终止学习速率时,终止训练,确定网络权重值与偏置值,得到网络模型。
[0055]
5.超分辨处理
[0056]
根据表1所示参数,模拟扫描雷达实波束图像,结果如图3所示。然后,将图4所示的实波束图像输入已经训练好的网络,输出得到超分辨图像。最终得到如图5所示的超分辨结果。从图5可以看出通过实波束扫描雷达成像后的方位向的目标混为一体时,可以将其分解开,具有优秀的超分辨能力;本发明的方法相比传统方法,训练完成后具有计算量小、成像质量高的优点。
[0057]
本领域的普通技术人员将会意识到,这里所述的实施例是为了帮助读者理解本发明的原理,应被理解为本发明的保护范围并不局限于这样的特别陈述和实施例。对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的权利要求范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1