用于避免在汽车的雷达传感器之间的干涉的方法、雷达系统和软件产品与流程
1.本发明涉及一种用于避免在汽车的雷达传感器之间的干涉的方法,所述雷达传感器分别与无线的通信网络的节点连接,在所述方法中,每个节点将关于所连接的雷达传感器的状态的信息发送到网络中并且从网络接收关于其他的雷达传感器的状态的信息。
背景技术:
2.在机动车中,雷达传感器与驾驶员辅助系统相结合地使用于检测交通环境,尤其是用于定位其他的交通参与者。特别地,为此目的而使用fmcw雷达传感器,在所述fmcw雷达传感器中,对所发送的雷达信号的频率斜坡状地进行调制。如果同样地装有雷达传感器的其他的车辆位于车辆的环境中,则当由所述雷达传感器所使用的频带相互重叠时,这可能导致干扰性的干涉。
3.为了减少相互间的干涉,在de 102 017 216 435 a1中提出一种以上所提及的类型的方法,该方法基于在雷达传感器之间的无线电通信。但是,该方法基本上限于在分隔开的频率区域中可运行的雷达传感器并且实质上论述一种用于在所参与的雷达传感器之间协商干涉最优的频率分配的方法。这种协商在出现协调标准之后开始。
4.在j.khoury、r.ramanathan、d.mccloskey、r.smith和t.campbell的《radarmac:减轻在自动驾驶的汽车中的雷达干涉》(2016年第13届关于感测、通信和联网(secon)的年度ieee国际会议,伦敦,2016年,第1-9页)中提出一种解决方案,该解决方案设置中央的主管机关以用于在同类的雷达传感器之间进行调解。
5.在c.aydogdu等人的《radchat:用于汽车雷达干涉减轻的谱共享》(关于智能交通系统的ieee汇刊,2019年1月)中,将与雷达的通信集成在同一频带中。
6.从实践中也已知一种用于所谓的谱感测(也称为测量前分析,abm)的方法,借助该方法收集关于在用于发送的频率区域之外的干涉状况的信息。
7.在无线电通信标准ieee 802.11p,2010和3gpp ts 22.186,v16,technical specification group services and system aspects,enhancement of 3gpp support for v2x senarios,2019中,说明如下无线电标准:所述无线电标准可以示例性地用于传输对于干涉减小所必要的数据。
技术实现要素:
8.本发明的任务在于,说明一种方法,即使当所参与的雷达传感器在它们的结构型式和它们的特性方面实质性地相互不同时,该方法也实现对干涉的高效抑制。
9.根据本发明,该任务通过以下方式解决:在每个节点中,基于所接收的信息创建至少一个数字地图,所述至少一个数字地图将干涉的预期强度作为时间和由所连接的雷达传感器所使用的频率的函数进行说明,并且对于该雷达传感器,根据地图来确定在时间/频率空间中的轨迹。
10.在该方法中,信息避免策略既不是在所参与的雷达传感器之间协调的,也不是由中央的主管机关预先给定的。取而代之地,每个雷达传感器通过通信接口(所谓的节点)也将在该雷达传感器的地点上可用的重要相关的信息提供给在其他的车辆中的其余的雷达传感器使用。因而,在每个节点中并且因此也在连接在该节点上的每个雷达传感器中,所有存在于环境中的雷达传感器的所有信息的总体可供使用并且构成用于在二维的时间/频率空间中以函数的形式预测预期干涉的基础,所述函数是对干涉的强度的度量。变量时间和频率的这个函数由数字地图表示,在所述数字地图中,每个时间/频率单元配有所计算的函数值。该地图在时间维度上从现在越过一定的时段延伸到未来。在每个雷达传感器的控制装置中,已知的是,传感器当前以哪种频率(频带的中心频率)工作,从而可以在时间/频率空间中定位雷达传感器的当前的位置。如果从这个位置出发在时间轴的方向上在地图上运动,则可以预见,干涉状况在未来是将改善还是将恶化。同样地,可看到,对于偏离当前的自身频率的其他频率,干涉状况将如何发展,从而在即将发生恶化的情况下,可以发展出一种另选策略,所述另选策略的核心在于,另选一种频率,在该频率下,干涉的所预期的程度较小。然后,在给定的时间点描述自身的雷达系统的中心频率的点不是直线式地在时间方向上运动,而是也在频率轴线的方向上运动并且因而在时间/频率空间中描述一种轨迹,该轨迹在干涉的程度方面得到优化。
11.即使当所参与的雷达传感器的运行参数在很宽的区域中改变时,这种方法也实现对干涉的有效抑制。因此,这种方法不以相同的调制方式、发送时间、测量周期时间、高频带宽等为前提。
12.在所参与的雷达传感器之间的特别的协调也不是必需的,而是每个雷达传感器基于数字地图在一定程度上寻找其自身的路径。仅在对于在不同的节点之间的通信必须约定一种对于所有的参与者节点可理解的数据格式的范围内,标准化是必需的。
13.本发明的有利的扩展方案和构型在下文中说明。
14.用于这里所提出的方法的通信网络可以具有非常不同的构型。例如,其可以涉及用于车辆与车辆的通信(vehicle to vehicle;v2v)的通信装置,或者也可以涉及用于在车辆与基础设施之间的通信(vehicle to infrastructure;v2x)的通信装置。在第一种情况下,相互通信的节点的数量的限制已经由通信装置的有限的有效距离产生。在v2x的情况下,这种限制可以由基础设施来确保。例如,通信可以通过互联网进行,其中,车辆与网站通信,这些车辆向所述网站报告它们当前的位置、取向、速度等,并且当状态消息从一个节点到达时,该网站根据这些数据来确定,对于哪些其他的节点,这些信息是重要相关的。
15.在一种实施方式中,每个雷达传感器通过合适的接口(can、flexray、以太网等)与通信网络的仅负责这一个雷达传感器的节点连接。然而,如果多个雷达传感器位于车辆的车厢栏板上,则该车辆的多个或者所有的雷达传感器也可以使用共同的节点。这具有如下优点:与车辆作为整体相关的数据(例如位置、速度、加速度、侧滑速度等)仅需传送一次。
16.特别地涉及单个的雷达传感器的状态信息可以包括例如以下的数据对象中的一个或者多个:
[0017]-所发送的雷达信号的中心频率,
[0018]-所占用的频带的宽度,
[0019]-发送功率,
[0020]-雷达传感器相对于车辆的前进方向的取向,
[0021]-典型化的发送天线图的代码(识别码)(例如根据+-75
°
、+-60
°
、+-45
°
、+-30
°
、+-10
°
的方位角上的打开角度的典型化),
[0022]-典型化的极化特性的代码(识别码)(例如水平的、垂直的、+45
°
、-45
°
、左圆形的、右圆形的),
[0023]-用于更准确地辨识带符号的斜坡陡度和调制方式的代码(识别码),
[0024]-测量周期持续时间、发送持续时间和测量周期相对于世界时间时钟信号所计划的开始时间,
[0025]-以新的频率、测量周期开始时间和必要时新的调制特性进行的有意的频率或者计划时间(timing)更换的通知,
[0026]-有关主动地使用的干涉避免机制的信息,例如方向相关的频率选择。
[0027]
这些数据也可以部分地作为用于相应的特性目录的密钥来传送,例如用于已知的传感器的已知的运行状态的id。
[0028]
在一种特别有利的实施方式中,所发送的信息也包括:
[0029]-在由传感器占用的带宽中所测量或者所估计的干涉的强度,和/或
[0030]-在由传感器占用的带宽外所测量或者所估计的干涉的强度(谱感测的结果)。
[0031]
对这些数据的包含能够实现,使所参与的节点也可接触到关于预期干涉的信息,所述干涉不是由所参与的雷达传感器本身引起的,而是由其他的来源引起,例如由车辆的未参与在这里所说明的方法的雷达传感器引起。
[0032]
然后,用于避免干涉的策略的一个重要的因素是计划频率更换,也就是说,基于时间/频率空间的数字地图计划由自身传感器所发送的信号的中心频率的改变。然后,所计划的频率更换的时间点和频率确定自身传感器在时间/频率空间中的轨迹。
[0033]
一种另外的用于避免干涉的策略充分利用如下情形:雷达传感器不是持续地发送,而是间歇式地发送。因为对在测量周期中所测量的数据的数字的分析处理不可以实时地进行,所以测量周期(在所述测量周期中,雷达信号被发送和测量)周期性地由空隙(在所述空隙中,不发送,而是仅仅进行对数据的分析处理)中断。因为这些空隙通常比单个的测量周期的持续时间更大,所以可以将两个潜在地发生干涉的雷达传感器的测量周期的实时时钟如此配合,使得一个雷达传感器的测量周期分别位于其他的雷达传感器的测量周期之间的空隙中,从而即使在使用相同的频带时也不会发生干涉。单个的测量周期的开始时间的对此必要的偏移对应于轨迹沿着时间轴线的偏移。
[0034]
补充地,也可以通过以下方式将干涉进一步地最小化:改变自身雷达传感器的其他的运行参数,例如在频率调制时的斜坡斜度(可测量的干扰功率密度的影响)、发送天线和接收天线的极化和/或方向特性以及信号处理的参数。
[0035]
本发明还涉及一种相应的雷达系统和一种相应的软件产品。
附图说明
[0036]
以下根据绘图更详尽地阐述实施例。
[0037]
附图示出:
[0038]
图1示出用于说明根据本发明的方法的示意图;
[0039]
图2示出由ffcw雷达所发送的信号的频率/时间示意图;
[0040]
图3示出要针对每个所参与的雷达传感器实施的方法的主要的步骤的流程图;和
[0041]
图4示出示例性的雷达传感器的方框图,所述雷达传感器配置用于实施根据本发明的方法。
具体实施方式
[0042]
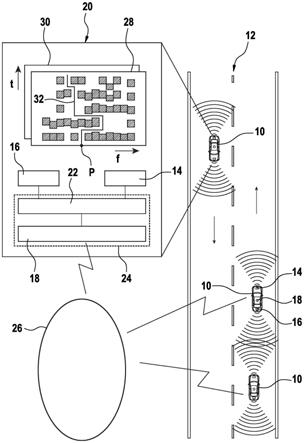
在图1中示出一种交通状况,在该交通状况中,三辆车辆10在道路12上行驶,所述道路对每个行驶方向具有各一条车道。在所示出的示例中,每个车辆在前部具有在行驶方向上向前定向的雷达传感器14和在后部具有在行驶方向上向后定向的雷达传感器16。雷达传感器的雷达波瓣分别由风格化的波表明。
[0043]
三辆车辆中的每辆具有车载导航系统(没有示出)以及用于车辆与车辆(v2v)通信的通信装置18。每个车辆的雷达传感器14、16和通信单元18是雷达系统20的部分,该部分对于在图1中的车辆中的一辆再一次作为方框图分开地示出。此外,还有处理器单元22属于雷达系统20,所述处理器单元一方面与雷达传感器14、16连接并且另一方面与通信装置18连接并且控制在自身车辆的雷达传感器和其他的车辆的雷达传感器之间的数据交换,所述其他的车辆位于通信装置18的接收区域中。因此,处理器单元22和通信装置18一起构成在通信网络26中的节点24,通过该通信网络可以将数据从车辆到车辆地传送。
[0044]
如果车辆10的雷达传感器14、16中的两个或者更多使用相同的频带,则可能发生干涉,所述干涉会干扰对所接收的信号的分析处理并且会歪曲测量结果。这样的干涉不仅可以通过以下方式产生:由雷达传感器所发送的信号直接地由其他的车辆的雷达传感器接收,而且在较小程度上可以通过以下方式产生:雷达传感器接收信号,该信号由其他的雷达传感器发送并且然后在对象上被反射。
[0045]
通信网络26用于,将雷达传感器的运行参数如此相互配合,使得干涉尽可能地得到抑制。为此,每个节点24以标准化的数据格式发送一组状态信息,所述状态信息使得其他的节点24中的每个能够实现,在考虑其自身瞬时的状态的情况下预先计算那个紧接着的测量周期或者那些紧接着的测量周期中预期干涉强度。
[0046]
所发送的信息一方面包括自身车辆10的位置数据、尤其是位置和取向,以及关于该车辆的雷达传感器的发送波瓣和接收波瓣的取向的信息,关于所使用的频带、测量周期时钟信号、调制模式、极化等的信息。根据这些数据,每个雷达系统的处理器单元22能够为自身雷达系统20的雷达传感器14计算预期干涉的由其他的车辆的雷达传感器中的每个所引起的程度,并且将结果记入数字地图28,所述数字地图标出所预期的干涉功率或者用于干涉的强度的任何其他的合适的度量作为自身雷达传感器的时间t和频率f(中心频率)的函数。将针对其他的车辆的不同的雷达传感器获得的结果在数字地图28中相加地叠加,从而地图最终标出在紧接着的将来完整的干涉活动的时间发展。也为自身车辆的雷达传感器16创建相应的数字地图30。
[0047]
在图1中示出数字地图28的简化的示例,在所述数字地图中,干涉的强度是时间t和频率f的二元函数。在数字地图中的所有如下像素划阴影线地示出:对于所述像素,所预期的干涉强度位于确定的阈值以上;而在地图的白色的区域中干涉位于允许的阈值以下。在地图的下方的边缘上的点p标出当前由雷达传感器14所使用的频带的中心频率。该点p构
成轨迹32的起点,该轨迹描绘,雷达传感器14的频率f应如何随时间变化。只要频率不改变,轨迹就平行于时间轴伸展。到其他的频率的每次更换由轨迹在频率轴线的方向上的突然转变来表示。在处理器单元22中,借助于合适的算法来如此计算轨迹32的走向,使得该轨迹避免地图上的如下地带(阴影):在这些地带中,可能要考虑到在阈值以上的干涉。
[0048]
可以理解,根据时间和频率描绘干涉的强度的函数在实践中也可以是多值的或者准连续的函数。在这种情况下,用于确定轨迹32的算法在时间/频率空间中搜索如下路径:在所述路径上,预期的干涉最小。
[0049]
图2说明fmcw雷达传感器的一种简单的频率调制模式。雷达传感器的经调制的发送频率fm作为时间t的函数示出。该函数具有频率斜坡34的序列的形式,所述频率斜坡具有相同的斜度和相同的频率偏移并且具有中心频率f。然而,该频率斜坡的序列不是不中断地发送的,而是分别仅在时间上有限的测量周期36的持续时间内发送。每个测量周期36之后跟着一个休止周期38,在该休止周期中,不发送任何信号。因为负责所接收到的雷达信号的分析处理的处理器仅具有有限的计算能力,所以需要休止周期38,以便处理和分析处理在前面的测量周期36中所接收的信号。雷达传感器的这种间歇式运行是在图1中在数字地图28中划阴影线的面具有矩形的形状的原因,所述矩形在时间方向上由空隙相互分隔开。这些矩形中的每个在方向f上的宽度对应于(其他的车辆中的一个的)以中心频率进行发送的雷达传感器的频带的宽度,并且,矩形的高度对应于用于该雷达传感器的测量周期36的持续时间。测量周期的长度和重复率可以是从传感器到传感器地不同。由此原因,在图1中的划阴影线的矩形构成垂直的纵队在所述垂直的纵队中,矩形分别具有相同的高度和相同的间距,其中,然而,高度和间距从纵队到纵队地不同。
[0050]
此外,在地图28中也考虑,车辆10以可预测的方式运动并且因此可预见的是,从何时起自身雷达传感器从其他的车辆中的一个接收信号并且何时该自身雷达传感器将再次离开该车辆的影响区域。因此,在地图28中的纵队中的一些在某个时间点中断,而其他的纵队新添加。
[0051]
此外,数字地图28也考虑自身的测量周期的时钟信号。如果自身的雷达传感器的测量周期36处于使用相同的频带的其他的雷达传感器的休止周期38中,则不发生干涉,并且该传感器对数字地图28没有任何贡献。
[0052]
因此,避开即将发生的干涉的一种可能性在于,不更换频带,而是将测量周期的时钟信号如此偏移,使得自身的测量周期落到其他的传感器的休止周期中。时钟信号的这种偏移不可避免地导致,来自下一个测量周期的测量结果以一定的延迟才变得可用。因此,时钟信号的这样的偏移仅在如下范围内是可能的:在所述范围内,可以容忍测量结果的延迟到达。
[0053]
在图3中,将用于干涉避免的方法的主要的步骤作为方框图示出,所述方法要在节点24中的每个节点中实施。
[0054]
在步骤s1中,通过通信网络26从其他的节点24接收所有重要相关的数据。
[0055]
在步骤s2中,根据重要相关性对所接收的数据进行过滤。尤其是,在此,将关于雷达传感器的如下数据隐没:由于所涉及的车辆的位置和雷达传感器的取向,从所述数据中不会预期到干涉。
[0056]
v2v通信的有效距离典型地为数百米。但是,当前重要相关的传感器例如仅是在下
一个测量周期中位于自身的传感器附近(大约《10-50m)的那些传感器。在这里,可以例如根据例如矩形的几何的面来定义对附近的评估,所述矩形的面包含传感器。也可以考虑所预期的干涉功率来限制重要相关的节点的数量。在这种情况下,仅考虑具有最高的所预期的干涉功率的n个潜在的干扰者。
[0057]
例如,可以根据如下环境表来执行重要相关的车辆的初次过滤:在所述环境表中,列出所有位于接收区域中的车辆。该环境表由通信装置18产生和传送。
[0058]
在步骤s3中,由所传送的数据外推或者估计在下一个测量周期中所预期的干扰功率密度。根据由其他的传感器所发送的关于调制特性、尤其是斜坡陡度和斜坡重复率的信息,从距离、天线图的型式和所传送的发送功率估计所预期的干扰功率密度作为对在基带中所预期的干涉的度量。还可以通过来自上一次的雷达测量的信息来改进估计,其方式是,也同时考虑具有与自身类似的定向的传感器的干涉在由自身的雷达所测量的目标上的反射。
[0059]
在步骤s4中,将如此求取的干扰功率密度在地图28中与其他的传感器的所估计的干扰功率密度不相干地叠加,也就是说,相加。例如,所存储的数字地图28的像素大小为50μs
×
10mhz。
[0060]
在步骤s5中,以当前的传感器参数执行在测量周期上的雷达测量。必要时,将谱感测(abm)连接在后面,在所述谱感测中,传感器还在由其所占用的频带之外接收,而自身不发送。
[0061]
在步骤s6中,在由传感器主动地占用的带宽中的干涉(干扰功率)测量的结果和必要时被动地接收的干涉的结果在地图28上不相干地叠加,也就是说,将功率密度加至已经记入的那些功率密度。然后,干涉的时间/频率地图(地图28)表示根据在完整的雷达带(例如,76-81ghz)中的可用的信息对干涉比例的估计。所示出的干涉功率密度应接近在基带中所预期的干扰功率。
[0062]
为了最优地使用干涉测量和谱感测的结果,在步骤s2中,可以放宽对这些特殊的数据类型的过滤标准。例如,如果在前面行驶的车辆中测量到来自迎面而来的车辆的强烈的干扰辐射,但是在自身的车辆和前面行驶的车辆之间的间距如此大,使得该车辆在正常情况下在步骤s2中可能被忽略,则符合目的的是,仍然重视由该车辆所报告的干涉测量和谱感测的结果,因为这些结果对于自身车辆可能是非常重要相关的。
[0063]
在步骤s7中,计划用于下一个测量周期36的传感器参数。传感器参数对传感器性能具有重要的影响。因此,多个内部的传感器参数(例如测量持续时间、频率斜坡的数量和其斜度)已经由相应的传感器功能定义并且在必要时可以仅在小的范围内改变。测量周期的参数中心频率f和开始时间点至少取决于所需要的传感器功能。因此,这些参数的匹配构成最重要的另选策略。以2d窗口函数对地图28在最小的干涉的地点方面进行扫描,所述2d窗口函数对应于来自传感器的雷达信号处理的窗口函数。由窗口函数在时间方向和频率方向上的延展产生在这种搜索的时间和频率上的步宽。对于用于确定时间/频率空间中的轨迹的算法,可设想不同的变型,在所述不同的变型中,两个变型在这里作为示例呈现。
[0064]
变型1:如果辨识出所预期的干涉的单值的最小值,则对于这些参数计划下一次发送。在这里,频率的改变由可用的雷达频率的调节或者由传感器的能力限制。新的计划时间(发送的开始时间点)的选择必须考虑下游雷达信号处理的最大允许的等待时间以用于新
的测量。
[0065]
如果在干涉的时间/频率地图中存在着多个具有相同低的干涉的地点,则选择可以随机地进行或者选择最小值,在所述最小值处,可以使自身的发送的计划时间尽可能地不变。
[0066]
变型2:替代地,也可以基本上随机地从时间-频率地图中的低于阈值的地点的列表中选择,所述阈值由以2d窗口函数扫描的干涉功率的中位数自适应地计算。由此减小两个传感器可能突然转变到相同的空隙中的概率。
[0067]
有意义地,中心频率的更换和或计划时间的更换也占用至少一个通信时钟信号的持续时间的等待时间,从而关于更换的信息在所有其他的节点中也是已知的。为此,也可以随机地选择等待时间,以便避免分布在不同的传感器上的干涉调节的振荡。
[0068]
同样地,为了避免如下不利的状况:在所述不利的状况下,不同的车辆的传感器循环地一再操控相同的时间/频率地点并且在那里分别强烈地干涉,应限制单位时间内无线电资源更换(频率或者计划时间的更换)的数量。相应的传感器根据在频带中所观察到的总体干涉并且在必要时根据对于制造者具有决定性意义的标准化的预给定来选择限制。替代地,可以使用迟滞机制:也就是说,仅当在其他的无线电资源上所预期的干涉低x或者更多的db时,才更换无线电资源。在这里,x可以位于3至10db的区域中。
[0069]
最后,在步骤s8中,将自身传感器的数据向其他的车辆传送。所传送的数据具有与在步骤s1中所接收的数据相同的数据格式。
[0070]
紧接着步骤s8地进行到步骤s1的回跳,并且在确定的等待时间到期之后开始新的程序运行,从而数据分别在步骤s8中以确定的重复率传送。
[0071]
重复率一方面可以由在信道上的负载影响,但是也可以由消息内容的改变率影响。例如,如果在雷达天线图上设置导致干扰功率密度改变的改变,则必须将这些改变快速地向其他的节点传送。与此相反地重复的干扰功率密度可以标记为这样的并且必须更少地传输。
[0072]
在这里所示出的实施方式中,在处理器单元22上实施步骤s1-s4和s6-s8。在其他的实施方式中,步骤s7和s8以及必要时还有s3、s4和s6可以在相应的雷达传感器的处理器上实施,从而处理器单元22仅承担数据接收和过滤。在又一其他的实施方式中,可以在雷达传感器上分散地实施所有的步骤。
[0073]
在图4中根据方框图示出雷达传感器的用于减少干涉的基本能力。粗体地加边的方框表示被添加到常规的雷达传感器的模块,以便能够实现这里所说明的方法的实施。
[0074]
如在常规的fmcw雷达传感器中那样,待发送的高频信号在调制器40中产生并通过放大器42、44向天线阵列46传送并且发射。由天线阵列46所接收的雷达回波通过放大器48向混频器50传送并且在那里与放大器42的输出信号向下混频到基带信号52中。然后,通过模拟/数字转换器54向探测模块56移交基带信号,在所述探测模块56中探测干涉信号。将探测结果向处理器单元22传送,所述处理器单元22此外也从通信装置18接收其余的节点24的信息并且基于这些信息确定用于避免未来的干涉的另选策略。与之并行地,借助于通信装置18通过在处理器单元22中所计划的另选策略告知在其他的车辆中的节点24。
[0075]
另选策略尤其包括如下信号:所述信号促使调制器40更换频带和/或测量周期的时间信号。如由划成虚线的箭头所表明地,附加地,也可以更改天线阵列46的发送功率(放
大器44)和方向特性。
[0076]
此外,探测模块56的探测结果也被转交给校正模块58,所述校正模块根据关于干涉源的现有的信息来补偿干涉效应。然后,在fft模块60中将以这种方式校正的时间信号加窗并且对其进行快速傅里叶变换(fft)。如此获得的谱在分析处理模块62中被分析处理,以便计算所定位的对象的间距、相对速度和定位角。最后,在跟踪模块64中,将如此获得的定位数据与来自前面的测量周期的定位数据进行比较并且最后将其以对象假设66的形式向连接在后面的系统输出。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1