基于惯性星光组合的星矢量气动光学零位误差校正方法
1.本发明属于临近空间高超声速飞行器惯性星光组合导航技术领域,尤其涉及一种基于惯性星光组合的星矢量气动光学零位误差校正方法。
背景技术:
2.星光导航作为提升惯性导航性能的主要方式广泛应用于中远程、洲际弹道导弹中。在飞行器进入大气层外空间后,通过调姿观星校正射前初始对准误差和惯性导航随时间发散的平台角误差,进而提升位置精度。临近空间高超声速飞行器采用惯性/星光组合方式,理论上可以达到百米量级的导航精度。
3.然而,高超声速飞行器在大气层内外跳跃飞行,星光观测窗口会有杂光以及激波、剪切层等复杂流场干扰,使惯性/星光组合观测传感器饱和、星图信噪比降低、星矢量偏移,即面临惯性/星光组合气动光学效应影响,导致组合不可用或者性能劣化。已有研究表明,飞行器在近空间以3马赫巡航时,在传感器未饱和时的气动效应误差约10角秒,远大于星敏感器3角秒的典型性能。
4.气动光学效应对星矢量的误差可以分为两部分,第一部分是高阶气动光学效应与气动噪声所引起的星矢量随机漂移,第二部分为低阶气动光学效应所引起的星矢量零位误差。传统的基于图像复原的星矢量误差校正方法对星矢量的随机漂移校正效果显著但是无法对零位误差进行有效校正,因此亟需研究一种可以有效校正气动光学效应所引起的星矢量零位误差的方法。
技术实现要素:
5.为了解决上述已有技术存在的不足,本发明提出一种基于惯性星光组合的星矢量气动光学零位误差校正方法,运用惯性星光组合滤波实现对气动光学星矢量零位误差的建模与校正。根据惯导系统与星敏感器输出的信息建立包含气动光学星矢量零位误差的误差状态模型与观测模型,并形成基于线性卡尔曼滤波器的闭环校正信息融合方案校正气动光学星矢量零位误差。本发明的具体技术方案如下:
6.基于惯性星光组合的星矢量气动光学零位误差校正方法,包括以下步骤:
7.s1:构建包含星矢量气动光学零位的状态方程与观测方程;
8.星敏感器在其工作时段内向惯性导航系统提供连续星光量测信息,根据惯性导航系统误差模型,设星光惯性系统安装误差、惯性导航系统工具误差均已预先进行补偿,并考虑星矢量的方位角与高度角的气动光学零位误差,得到包含位置误差、速度误差、姿态误差与星矢量气动光学零位误差的导航坐标系下的组合导航状态方程与观测方程;
9.s2:输入状态初值、系统常数及系统噪声,计算状态一步预测值、状态一步预测均方误差及系统的滤波增益;
10.s3:利用观测方程对状态一步预测值、状态一步预测均方误差进行修正得到系统的估计值;
11.s4:通过逐次迭代更新即能够获得位置误差、速度误差、姿态误差与星矢量气动光学零位误差的导航坐标系下的最优估计。
12.进一步地,所述步骤s1中,设惯性导航系统的导航坐标系为游动自由方位坐标系,姿态误差为ψ
x
、ψy、ψz,速度误差为δv
x
、δvy、δvz,角位置误差为δθ
x
、δθy、δh,在平台坐标系即s系下星矢量高度角与方位角气动光学零位误差为陀螺漂移为ε
x
、εy、εz,加速度计偏置为载体运动角速率为ρ
x
、ρy、ρz,地球自转角速率为ω
x
、ωy、ωz,ω为载体角速度矢量与地球自转角速度矢量之和,即ρ+ω,三个分量分别为ω
x
、ωy、ωz,载体运动速率为v
x
、vy、vz,地球半径为r;载体感受的比力为f
x
、fy、fz,则有如下状态方程与观测方程,状态方程包括位置误差方程、速度误差方程、姿态误差方程和星矢量气动光学零位误差方程,具体地,
13.位置误差方程为:
[0014][0015]
速度误差方程为:
[0016][0017]
姿态误差方程为:
[0018][0019]
星矢量气动光学零位误差方程为:
[0020][0021]
其中,τ
δel
为星矢量的高度角气动光学零位误差相关时间,τ
δaz
为星矢量的方位角气动光学零位误差相关时间;
[0022]
观测方程为:
[0023]
z=hx(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0024]
其中,z为观测矢量;
[0025]
状态矢量
[0026]
观测矩阵
[0027][0028]
其中,elc与azc为计算地理坐标系下的高度角与方位角,满足:
[0029][0030][0031]
其中,λ与为惯性导航系统某一时刻输出的经纬度,δ为恒星的赤纬,gha为恒星的格林时角。
[0032]
进一步地,所述步骤s2中,状态一步预测为:
[0033][0034]
其中,为第k步的状态矢量xk的先验估计,为第k-1步的状态矢量x
k-1
的后验估计,φ
k/k-1
为状态方程的结构参数矩阵;
[0035]
计算状态一步预测均方误差:
[0036][0037]
其中,p
k/k-1
为第k步的状态一步预测均方误差,p
k-1
为第k-1步的状态估计均方误差,γ
k-1
与q
k-1
分别为第k-1步的状态方程的噪声结构参数矩阵与系统噪声矩阵;
[0038]
计算滤波增益:
[0039][0040]
其中,kk为第k步的滤波增益矩阵,hk为第k步的观测矩阵,rk为观测噪声矩阵。
[0041]
进一步地,所述步骤s3中,状态估计:
[0042][0043]
其中,为第k步的状态矢量xk的后验估计,zk为第k步的观测矢量;
[0044]
计算状态估计均方误差:
[0045]
pk=(i-k
khk
)p
k/k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0046]
由式(8)-式(12)构成卡尔曼滤波器,通过实时的输入滤波算法的参数与状态矢量即可实现对星矢量气动光学零位误差的实时校正,获得高精度的星矢量估计值。
[0047]
本发明的有益效果在于:
[0048]
1.本发明可以完善惯性/星光组合气动光学效应校正理论体系,提高高超声速飞行器在复杂流场干扰下的惯性/星光组合导航精度,加速促进长航时、远程高超声速飞行器
的装备发展。
[0049]
2.本发明提出的方法可广泛应用于各类无人机,弹道导弹,巡航导弹的惯性/星光组合导航系统中,以提高其在复杂流场干扰下的组合导航精度。
附图说明
[0050]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例中所需要使用的附图作简单地介绍,通过参考附图会更加清楚的理解本发明的特征和优点,附图是示意性的而不应理解为对本发明进行任何限制,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,可以根据这些附图获得其他的附图。其中:
[0051]
图1为星光高度角与方位角示意图;
[0052]
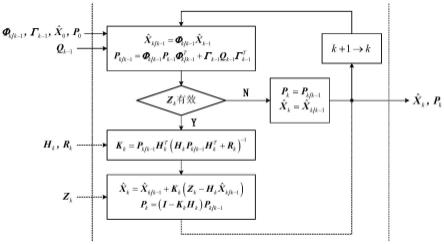
图2为卡尔曼滤波星矢量气动光学零位误差校正流程图。
具体实施方式
[0053]
为了能够更清楚地理解本发明的上述目的、特征和优点,下面结合附图和具体实施方式对本发明进行进一步的详细描述。需要说明的是,在不冲突的情况下,本发明的实施例及实施例中的特征可以相互组合。
[0054]
在下面的描述中阐述了很多具体细节以便于充分理解本发明,但是,本发明还可以采用其他不同于在此描述的其他方式来实施,因此,本发明的保护范围并不受下面公开的具体实施例的限制。
[0055]
本发明在假设星惯安装误差、惯组主要工具误差均已预先进行补偿的前提下,考虑星矢量的方位角与高度角的气动光学零位误差,获得包含位置误差、速度误差、姿态误差与星矢量气动光学零位误差的星导航坐标系下组合导航状态方程与观测方程。并利用惯性星光组合卡尔曼滤波的方式对星矢量的气动光学零位误差进行校正。
[0056]
具体地,基于惯性星光组合的星矢量气动光学零位误差校正方法,包括以下步骤:
[0057]
s1:构建包含星矢量气动光学零位的状态方程与观测方程;
[0058]
星敏感器在其工作时段内向惯性导航系统提供连续星光量测信息,根据惯性导航系统误差模型,设星光惯性系统安装误差、惯性导航系统工具误差均已预先进行补偿,并考虑星矢量的方位角与高度角的气动光学零位误差,得到包含位置误差、速度误差、姿态误差与星矢量气动光学零位误差的导航坐标系下的组合导航状态方程与观测方程;
[0059]
设惯性导航系统的导航坐标系为游动自由方位坐标系,姿态误差为ψ
x
、ψy、ψz,速度误差为δv
x
、δvy、δvz,角位置误差为δθ
x
、δθy、δh,在平台坐标系即s系下星矢量高度角与方位角气动光学零位误差为陀螺漂移为ε
x
、εy、εz,加速度计偏置为载体运动角速率为ρ
x
、ρy、ρz,地球自转角速率为ω
x
、ωy、ωz,ω为载体角速度矢量与地球自转角速度矢量之和,即ρ+ω,三个分量分别为ω
x
、ωy、ωz,载体运动速率为v
x
、vy、vz,地球半径为r;载体感受的比力为f
x
、fy、fz,则有如下状态方程与观测方程,状态方程包括位置误差方程、速度误差方程、姿态误差方程和星矢量气动光学零位误差方程,具体地,
[0060]
位置误差方程为:
[0061][0062]
速度误差方程为:
[0063][0064]
姿态误差方程为:
[0065][0066]
星矢量气动光学零位误差方程为:
[0067][0068]
其中,τ
δel
为星矢量的高度角气动光学零位误差相关时间,τ
δaz
为星矢量的方位角气动光学零位误差相关时间;
[0069]
观测方程为:
[0070]
z=hx(t)
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(5)
[0071]
其中,z为观测矢量;
[0072]
状态矢量
[0073]
观测矩阵
[0074][0075]
其中,elc与azc为计算地理坐标系下的高度角与方位角,如图1所示,满足:
[0076]
[0077][0078]
其中,λ与为惯性导航系统某一时刻输出的经纬度,δ为恒星的赤纬,gha为恒星的格林时角。
[0079]
s2:输入状态初值、系统常数及系统噪声,计算状态一步预测值、状态一步预测均方误差及系统的滤波增益;
[0080]
状态一步预测为:
[0081][0082]
其中,为第k步的状态矢量xk的先验估计,为第k-1步的状态矢量x
k-1
的后验估计,φ
k/k-1
为状态方程的结构参数矩阵;
[0083]
计算状态一步预测均方误差:
[0084][0085]
其中,p
k/k-1
为第k步的状态一步预测均方误差,p
k-1
为第k-1步的状态估计均方误差,γ
k-1
与q
k-1
分别为第k-1步的状态方程的噪声结构参数矩阵与系统噪声矩阵;
[0086]
计算滤波增益:
[0087][0088]
其中,kk为第k步的滤波增益矩阵,hk为第k步的观测矩阵,rk为观测噪声矩阵。
[0089]
s3:利用观测方程对状态一步预测值、状态一步预测均方误差进行修正得到系统的估计值;
[0090]
状态估计:
[0091][0092]
其中,为第k步的状态矢量xk的后验估计,zk为第k步的观测矢量;
[0093]
计算状态估计均方误差:
[0094]
pk=(i-k
khk
)p
k/k-1
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
(12)
[0095]
由式(8)-式(12)构成卡尔曼滤波器,通过实时的输入滤波算法的参数与状态矢量即可实现对星矢量气动光学零位误差的实时校正,获得高精度的星矢量估计值。
[0096]
s4:通过逐次迭代更新即能够获得位置误差、速度误差、姿态误差与星矢量气动光学零位误差的导航坐标系下的最优估计,整体的卡尔曼滤波校正流程如附图2所示。
[0097]
以上所述仅为本发明的优选实施例而已,并不用于限制本发明,对于本领域的技术人员来说,本发明可以有各种更改和变化。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1